一种切换无人艇的传感器故障容错无扰控制方法
- 国知局
- 2024-08-01 00:21:04
本发明涉及无人艇控制,具体为一种切换无人艇的传感器故障容错无扰控制方法。
背景技术:
1、无人艇作为一种特殊的海洋载具,具有体积小、成本低、机动性高和智能化等优点,可满足避免人员伤亡和执行极端任务等需求,在海洋研究与探查等领域得到了广泛应用;因此,近些年来,在技术开发方面围绕着无人艇的控制问题产出了大量成果。然而,大部分成果所提出的控制方法均存在着一些局限性,具体体现在:
2、其一,目前的控制方法通常是基于一个单一的整体模型,而忽略了某些切换行为的存在;比如,在执行打捞、调度和回收水下探测器等类型的作业时,无人艇的总质量是前后变化的,这就对应着不同的动力学行为。
3、其二,无人艇在长期执行任务后极易产生各种故障,尤其是传感器故障会导致错误的信息被反馈到控制器中,进而可能会引发无人艇系统的不稳定,所以对传感器的故障诊断和容错控制是十分必要的。为了诊断和补偿故障,首先需要对故障的大小进行估计,然而传统的大部分故障估计方法均要求故障是光滑可微的;但是在实际情况中,由于噪声和多重故障的作用,经常会存在随机故障和突变故障,无法满足光滑可微的要求。随着技术的发展,所提出的基于广义观测器的估计方法可用于估计随机故障和突变故障,但是这种估计方法中由于缺乏学习估计器的快速收敛性而使得会影响估计的精度,现有技术中并未出现足够理想的基于学习估计器的无人艇传感器故障估计方法。
4、其三,对无人艇传感器进行容错控制时,需要使用故障估计信息来构造容错控制器;与基于广义观测器的容错控制器相比,动态输出反馈容错控制器不仅可以避免状态估计误差的影响,还可以增加控制自由度。然而,针对无人艇所设计的动态输出反馈容错控制器一般是模态依赖的,这使得控制增益的切换会导致控制输入颠簸问题。现有技术中,即使有一些针对控制输入颠簸问题所作的改进,但是效果均比较有限,而且大部分并非专门针对无人艇控制技术领域;例如公开号为cn115167546a的中国专利提出了一种航空发动机转速调节控制方法、控制装置和存储介质,其中描述了“设计的事件触发切换控制器满足约束”,由此可知该专利通过减小模态依赖控制增益之间的差距,可在一定程度上降低控制输入颠簸,但是却无法完全消除控制输入颠簸,也不能实现连续的控制输入。
5、综上所述,本发明提出一种切换无人艇的传感器故障容错无扰控制方法是非常有必要的。
技术实现思路
1、本发明的目的在于提供一种切换无人艇的传感器故障容错无扰控制方法,可以实现对无人艇传感器故障的高精度和快速估计,并且实现良好的补偿效果,以解决上述背景技术中所提到的,现有的无人艇控制方法中所存在着的不适配切换行为、无法高精度估计传感器故障以及容错控制器在执行时存在控制输入颠簸的问题。
2、本发明是采用以下技术方案实现的:
3、一种切换无人艇的传感器故障容错无扰控制方法,包括如下步骤:
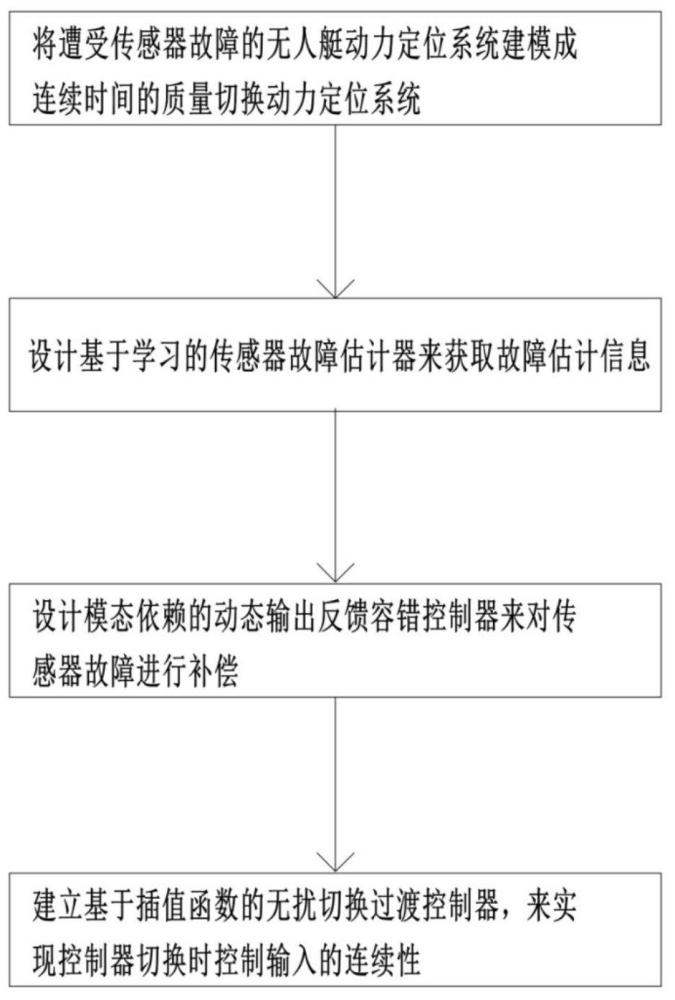
4、步骤一:基于无人艇在执行作业过程中总质量变化的情况,将遭受传感器故障的无人艇动力定位系统建模成连续时间的质量切换动力定位系统;
5、步骤二:针对步骤一中得到的质量切换动力定位系统,设计基于学习的传感器故障估计器来获取故障估计信息;
6、步骤三:根据步骤二中得到的故障估计信息,设计模态依赖的动态输出反馈容错控制器来对传感器故障进行补偿;
7、步骤四:在步骤三中得到的模态依赖的动态输出反馈容错控制器之间,建立基于插值函数的无扰切换过渡控制器,来实现动态输出反馈容错控制器切换时控制输入的连续性。
8、进一步地,所述步骤一包括如下子步骤:
9、步骤1-1:获得无人艇动力定位系统的数学模型;
10、步骤1-2:建立无人艇总质量变化情况下的多模态动力定位系统的数学模型;
11、步骤1-3:建立带有传感器故障的质量切换动力定位系统的数学模型。
12、进一步地,所述步骤二包括如下子步骤:
13、步骤2-1:为质量切换动力定位系统设计模态依赖观测器;
14、步骤2-2:设计基于学习的传感器故障估计器。
15、进一步地,所述步骤1-1中:
16、首先,由于无人艇在水平面的运动通常只考虑横荡运动、纵荡运动和艏摇运动这三个自由度,所以描述出三自由度下的无人艇动力定位系统的数学模型为:
17、,
18、其中,向量,向量,“t”表示相应向量的转置,“” 表示相应向量的导数;、和分别表示固定坐标系下无人艇的纵向位置、横向位置和艏摇角,、和分别表示船体坐标系下无人艇的纵荡速度、横荡速度和艏摇角速度;为推进器力矩,表示由海洋洋流、风和浪引起的外部有界扰动;为转移矩阵,m为可逆惯性矩阵,w为阻尼矩阵;
19、其次,通过在处进行线性化得到,进而可获得无人艇动力定位系统的线性数学模型为:
20、,
21、其中,,。
22、进一步地,所述步骤1-2中:
23、所建立的无人艇总质量变化情况下的多模态动力定位系统的数学模型为:
24、
25、其中,,为总模态个数;;、为模态相关的系统矩阵,、、、、、、、、、和为模态相关的系数。
26、进一步地,所述步骤1-3中:
27、由于总质量变化的情况可表示成一个分段常值函数,其中,所以建立的带有传感器故障的质量切换动力定位系统的数学模型为:
28、,
29、其中,表示可测输出,为传感器故障,,,,和分别为已知的测量输出矩阵和传感器故障矩阵。
30、进一步地,所述步骤2-1中:
31、所设计的模态依赖观测器为:
32、,
33、其中,、和分别表示观测器状态、测量输出的估计和传感器故障的估计,为观测器增益。
34、进一步地,所述步骤2-2中:
35、所设计的基于学习的传感器故障估计器为:
36、,
37、其中,为给定的学习间隔,为故障估计增益;
38、基于上式可知,通过学习前一时刻的故障估计值和利用当前误差信息,可获得当前时刻的故障大小。
39、进一步地,所述步骤三中:
40、所设计的模态依赖的动态输出反馈容错控制器为:
41、,
42、其中,为动态输出反馈容错控制器的状态,、、和为模态依赖的动态输出反馈容错控制器的增益矩阵,用于补偿传感器故障。
43、进一步地,所述步骤四中:
44、假设模态在时间点切换到模态,所建立的插值函数依赖的动态输出反馈无扰切换容错控制器为:
45、
46、其中,为第个切换时刻,为模态依赖的过渡时间,表示无扰切换过渡控制器运行阶段,表示镇定控制器运行阶段;、、和均表示过渡控制器的控制增益,形式分别为:
47、、、和,其中、均为时间依赖的插值函数,且满足。
48、本发明实现的有益效果是:
49、提供一种切换无人艇的传感器故障容错无扰控制方法,该控制方法与现有方法相比,通过将遭受传感器故障的无人艇动力定位系统建模成连续时间的质量切换动力定位系统,可适用于无人艇在执行作业过程中总质量变化的情况;通过设计基于学习的传感器故障估计器,能够在无人艇遭受传感器故障时进行对故障的精准估计;通过设计模态依赖的动态输出反馈容错控制器并且建立基于插值函数的无扰切换过渡控制器,可以实现对传感器故障的补偿,并对传感器故障引起的负面效果进行抵消,同时能够消除控制输入颠簸、实现连续的控制输入,从而实现良好的补偿效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200715.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表