一种基于超声阵列和深度学习的路况探测方法与流程
- 国知局
- 2024-07-31 20:28:34
本发明涉及模式识别,尤其涉及路况探测、避障的技术。
背景技术:
1、路况的探测问题在车辆的倒车提示、行驶路面检测、导盲、无人车避障等场景都会遇到。
2、常见的探测方法是用若干个超声波距离传感器通过超声回波时延计算障碍物的最短距离,根据距离进行提示告警。这种方式由于障碍物形状不规则、表面不平整、过细等原因常会发生测量波动,探测不准确。也不能对路况、障碍物的种类进行分类。
3、人工神经网络是一种模仿人脑实现信息处理的方法。它由大量的人工神经元相互联接构成。每个节点代表一种特定的输出函数,称为激励函数。每两个节点间的连接都代表一个通过该连接信号的加权值,称之为权重。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。其经过几十年的研究取得了很大的进展,特别是在深度学习技术发明后,准确度越来越高。在模式识别、智能机器人、自动控制、预测估计等领域已成功地解决了许多传统算法难以解决的实际问题,表现出了良好的智能特性。
4、本发明将深度学习技术与超声探测器阵列相结合解决路况探测问题,提高了探测的准确度,提示的丰富度。相对于基于视频图像的探测方法具有成本低、计算消耗低、光线不足仍可探测的优势。
技术实现思路
1、本发明所要解决的技术问题是路况的探测问题。
2、该方法主要包括以下关键技术要点:
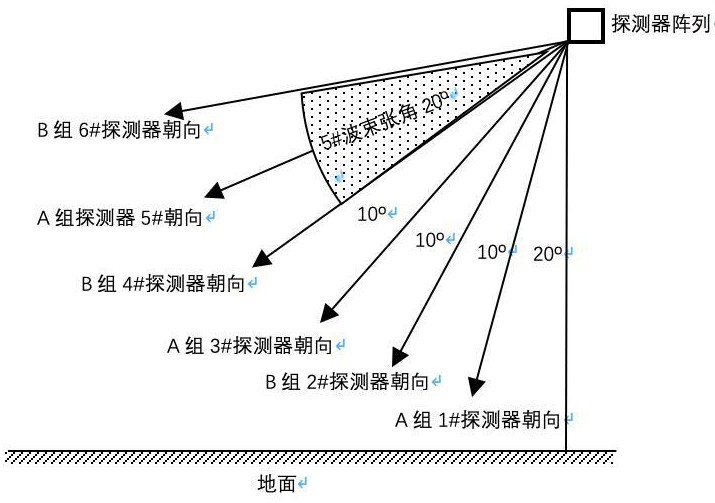
3、1) 一个朝向不同方向的超声波距离探测器阵列用于获取不同方向的物体距离情况;
4、2) 不同方向探测器逐个扫描获得一帧数据。获取一定时间间隔下,每个时刻的帧数据。设置合适的窗口大小,合并若干帧的数据,组成一幅数据。对每幅数据对应的路况类型进行人工标注;
5、3) 构造一个深度卷积人工神经网络。并在第2点获取的有标记数据上进行训练,得到能够区分路况的模型参数;
6、4) 将训练好的人工神经网络装入单片机系统。实时获取探测器阵列若干帧数据,按窗口大小合并为一幅数据,输入训练好的人工神经网络,通过计算获得路况的分类结果;
7、5) 根据分类结果,通过语音模块、显示模块等进行提示。
8、本发明的具体技术方案如下:
9、1) 设置一个探测不同方向物体距离的超声波距离探测器阵列。可以根据具体的探测目标横向或者纵向排列,以及设置不同的探测角度;
10、2) 通过单片机控制超声波阵列按顺序扫描,获取不同角度的距离数据作为一个数据帧。将一定时间间隔的数据帧记录下来。通过摄像头同步记录路况实景,方便后续分析路况用于标注。摄像头只在获取训练数据时有用,在成品探测中不是必须的;
11、3) 在实际使用环境中运行系统,采集实际各种路况下的数据。根据同步记录的路况实景,对记录下来的每幅数据进行人工标注;
12、4) 在pytorch或tensorflow等深度学习框架上构造一个多层卷积人工神经网络。网络包含输入层、多个卷积层、多个池化层(可选)、多个全连接层以及一个输出层。根据步骤3获得的有标记数据,对人工神经网络进行训练。直到差错率低于一定的数值;
13、5) 将训练好的人工神经网络进行量化以减少计算量,然后装入单片机中。通过单片机控制超声波阵列按顺序扫描,获取不同角度的距离数据作为一个数据帧。将若干数据帧按照滑动窗口大小组成一幅幅的数据连续输入人工神经网络,从而获得实时的路况分类;
14、6) 将分类结果通知语音模块进行提示、或者显示模块显示路况。
技术特征:1.一种基于超声阵列和深度学习的路况探测方法。
2.根据权利要求1的方法,其特征在于:一个朝向不同方向的超声波距离探测器阵列用于获取不同方向的物体距离情况。
3.根据权利要求2的方法,其特征在于:不同方向探测器逐个扫描获得一帧数据。获取一定时间间隔下,每个时刻的帧数据。根据窗口大小,合并若干帧的数据。并对这些数据相应的路况类型进行人工标注。
4.根据权利要求1的方法,其特征在于:构造一个深度人工神经网络。它由一个输入层、多个卷积层、多个池化层、若干全连接层以及一个输出层构成。在上述超声波距离探测器阵列获取的有标记数据上进行训练,得到能够区分路况的模型参数。
5.根据权利要求1的方法,其特征在于:将训练好的人工神经网络装入单片机系统。实时获取探测器阵列若干帧数据,输入训练好的人工神经网络,通过深度学习算法获得路况的分类结果。
6.根据权利要求1的方法,其特征在于:根据分类结果,通过语音模块、显示模块等进行提示。
技术总结本发明提出一种基于超声阵列和深度学习的路况探测方法。该方法首先设置一个朝向不同方向的超声阵列用于获取路面的起伏情况。然后在实际运行环境中获取大量各种路面情况下超声波阵列的数据。并对一段时间窗口的数据进行人工标注,标明对应的路况。在这些有标记数据上训练深度人工神经网络。将训练好的人工神经网络量化后装入单片机系统。单片机系统通过上述的超声阵列实时获取数据并输入人工神经网络,通过深度学习算法计算得出对应的路况。通过语音或者显示模块进行提示。技术研发人员:张南雨受保护的技术使用者:张南雨技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240731/186386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。