一种公路巡查方法、轨迹纠偏方法及巡查系统与流程
- 国知局
- 2024-07-31 20:44:53
本发明属于公路管理,尤其涉及一种公路巡查方法、轨迹纠偏方法及巡查系统。
背景技术:
1、公路巡查是排查公路沿线的各类风险,并及时提出示警,辅助公路进行养护。如排查桥梁、边坡、隧道的安全隐患,及时清理零散的路面抛撒物,对路面较大的坑槽及时示警,对违规在高速公路停车倒车等行为联合交警进行警示,对行人闯入高速进行劝离,抓捕驱离高速公路内的动物,对破坏高速公路设施进行制止,必要时,也会为遇到车辆故障、堵车等问题的司乘人员提供帮助等。
2、公路巡查的工作内容复杂而繁琐,但对车辆行驶安全来说又显得非常重要。目前公路巡查的方式主要是给巡查人员划定各自的巡查区域,巡查人员每天自行对各自巡查区域内的公路路段进行1~2轮的巡查,部分路段甚至要徒步巡查。
3、但是伴随着公路建设规模的扩大、公路数量的增加,公路巡查的总体工作量也愈加庞大,即使辅以无人机等智能设备来减轻巡查人员的工作负担,巡查人员的工作强度依然很大,所以如何进一步提高巡查效率,降低巡查的工作负担成为了公路管理领域亟待解决的问题。
技术实现思路
1、本发明的目的是克服上述现有技术的不足,提供一种公路巡查方法,能够进一步提高巡查效率,降低巡查的工作负担。
2、为实现上述目的,本发明采用了以下技术方案:
3、一种公路巡查方法,包括以下步骤:
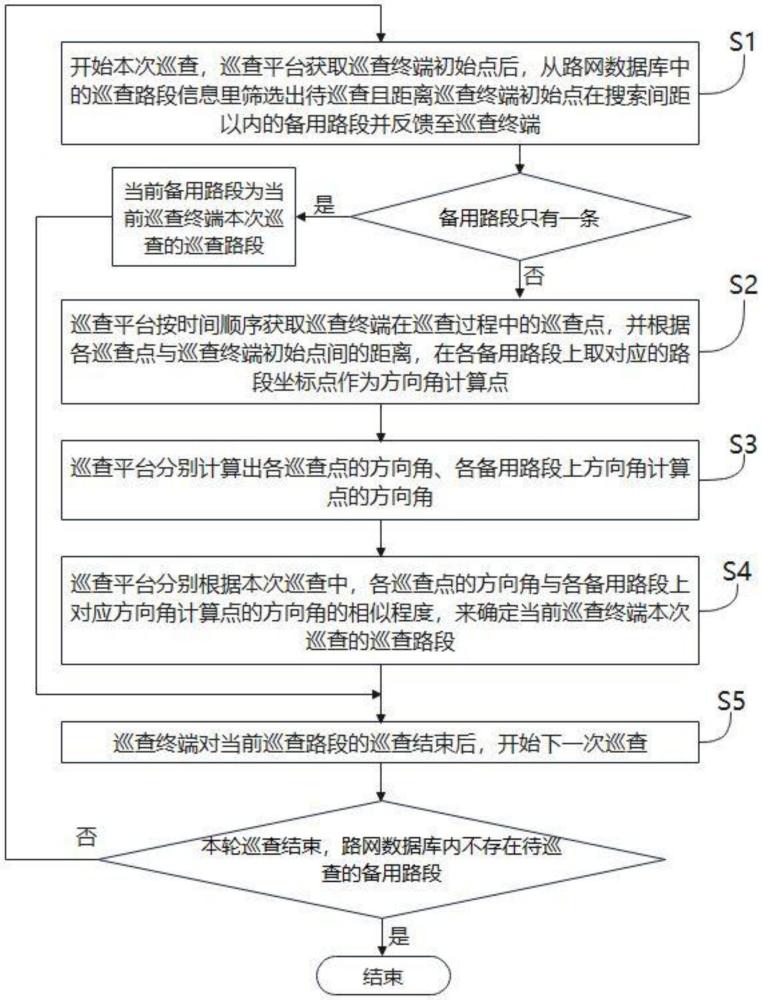
4、s1,开始本次巡查,巡查平台获取巡查终端初始点后,从路网数据库中的巡查路段信息里筛选出待巡查且距离巡查终端初始点在搜索间距以内的备用路段并反馈至巡查终端;若备用路段只有一条,则当前备用路段为当前巡查终端本次巡查的巡查路段,执行s5,否则执行s2;
5、s2,巡查平台按时间顺序获取巡查终端在巡查过程中的巡查点,并根据各巡查点与巡查终端初始点间的距离,在各备用路段上取对应的路段坐标点作为方向角计算点;
6、s3,巡查平台分别计算出各巡查点的方向角、各备用路段上方向角计算点的方向角;
7、s4,巡查平台分别根据本次巡查中,各巡查点的方向角与各备用路段上对应方向角计算点的方向角的相似程度,来确定当前巡查终端本次巡查的巡查路段,
8、s5,巡查终端对当前巡查路段的巡查结束后,重新回到s1,开始下一次巡查,直至本轮巡查结束,路网数据库内不存在待巡查的备用路段;
9、一轮巡查中包括一次以上的巡查,每次巡查不同的路段。
10、优选的,s1中具体还包括以下子步骤:
11、s11,开始本次巡查时,巡查平台获取地理坐标系下的巡查终端初始点p0,将巡查终端初始点p0的坐标点记为(p0lon,p0lat),其中,p0lon表示p0的经度,p0lat表示p0的纬度;
12、s12,巡查平台调取路网数据库内存储的待巡查路段信息,通过地理坐标系下的两坐标点距离计算方法,从待巡查路段信息中筛选出距离巡查终端初始点p0在搜索间距d以内、且属于当前巡查终端所对应的巡查区域内的路段坐标点;
13、s13,巡查平台将s12中筛选出的路段坐标点所对应的路段作为本次巡查的备用路段并反馈至巡查终端。
14、优选的,在s13后还包括s14:
15、s14,当巡查平台所反馈的本次巡查的备用路段只有1条时,则当前备用路段即为本轮巡查中本次巡查的巡查路段,且巡查终端前往对应的巡查路段;当巡查平台所反馈的本次巡查的备用路段超过1条时,则巡查终端从当前备用路段中选取1条备用路段并前往。
16、优选的,在s12中,巡查平台筛选路段坐标点还包括以下内容:
17、搜索间距d=[d0+k(δd)],
18、其中,d0表示初始距离且d0≥0,δd表示递增距离且δd≥0,k为递增系数且k为非负整数,
19、若巡查平台在当前搜索间距d下,无法筛选出距离巡查终端初始点p0在搜索间距d以内、且属于当前巡查终端所对应的巡查区域内的路段坐标点,则k递增1得到新的搜索间距d,直至巡查平台筛选出距离巡查终端初始点p0在搜索间距d以内、且属于当前巡查终端所对应的巡查区域内的路段坐标点后,执行s13。
20、优选的,s2中具体还包括以下子步骤:
21、s21,巡查平台继续按时间顺序获取巡查终端在本次巡查过程中的巡查点后,通过地理坐标系下的两坐标点距离计算方法来分别计算出各巡查点与巡查终端初始点p0间的距离;
22、s22,若一条备用路段在s12所筛选出的路段坐标点里,只有一个对应的路段坐标点,则当前路段坐标点即为当前备用路段的起始点a0,
23、若一条备用路段在s12所筛选出的路段坐标点里,存在超过1个路段坐标点,则取距离巡查终端初始点p0最近的路段坐标点作为当前备用路段的起始点a0;
24、巡查平台根据各巡查点与巡查终端初始点p0间的距离,在本次巡查的各条备用路段上取对应的路段坐标点作为方向角计算点,且备用路段的起始点a0指向当前备用路段上的任意方向角计算点的射线与巡查终端初始点p0指向对应巡查点的射线间的夹角为锐角。
25、优选的,s3中具体还包括以下子步骤:
26、s31,巡查平台分别计算出本次巡查中,各巡查点与巡查终端初始点p0相对于北极方向的方向角:
27、
28、其中,pn表示本次巡查中的第n个巡查点,n为正整数,θp0-pn表示本次巡查的巡查点pn相对于本次巡查的巡查终端初始点p0的方向角,pnlon表示pn的经度,pnlat表示pn的纬度,p0lon表示p0的经度,p0lat表示p0的纬度;
29、巡查平台分别计算出本次巡查中,各备用路段上方向角计算点与当前备用路段的起始点a0相对于北极方向的方向角:
30、
31、其中,am表示当前备用路段a上第m个方向角计算点,θa0-am表示方向角计算点am相对于当前备用路段的起始点a0的方向角,amlon表示am的经度,amlat表示am的纬度,a0lon表示a0的经度,a0lat表示a0的纬度;
32、s32,巡查平台分别将本次巡查中,各巡查点与巡查终端初始点p0相对于北极方向的方向角转化为四象限内的标准方向角,下面简称巡查点的标准方向角:
33、当pnlon≥p0lon且pnlat>p0lat时,或当pnlon>p0lon且pnlat≥p0lat时,则巡查点pn位于第一象限,巡查点pn的标准方向角θ[p0-pn]=θp0-pn,
34、当pnlon<p0lon且pnlat>p0lat时,则巡查点pn位于第二象限,巡查点pn的标准方向角θ[p0-pn]=θp0-pn+360°,
35、当pnlon≤p0lon且pnlat<p0lat时,或当pnlon<p0lon且pnlat≤p0lat时,则巡查点pn位于第三象限,巡查点pn的标准方向角θ[p0-pn]=180°-θp0-pn,
36、当pnlon>p0lon且pnlat<p0lat时,则巡查点pn位于第四象限,巡查点pn的标准方向角θ[p0-pn]=180°-θp0-pn;
37、巡查平台分别将本次巡查中,各备用路段上方向角计算点与当前备用路段的起始点a0相对于北极方向的方向角转化为四象限内的标准方向角,下面简称方向角计算点的标准方向角:
38、当amlon≥a0lon且amlat>a0lat时,或当amlon>a0lon且amlat≥a0lat时,则方向角计算点am位于第一象限,方向角计算点am的标准方向角θ[a0-am]=θa0-am,
39、当amlon<a0lon且amlat>a0lat时,则方向角计算点am位于第二象限,方向角计算点am的标准方向角θ[a0-am]=θa0-am+360°,
40、当amlon≤a0lon且amlat<a0lat时,或当amlon<a0lon且amlat≤a0lat时,则方向角计算点am位于第三象限,方向角计算点am的标准方向角θ[a0-am]=180°-θa0-am,
41、当amlon>a0lon且amlat<a0lat时,则方向角计算点am位于第四象限,方向角计算点am的标准方向角θ[a0-am]=180°-θa0-am。
42、优选的,s4中具体还包括以下子步骤:
43、s41,巡查平台分别计算出本次巡查中,各巡查点的标准方向角与各备用路段上对应方向角计算点的标准方向角之差的绝对值集合:
44、pa={pa1,...,pan,...,pah}={|θ[p0-p1]-θ[a0-a1]|,...,|θ[p0-pn]-θ[a0-an]|,...,|θ[p0-ph]-θ[a0-ah]|},
45、其中,pa表示本次巡查中,各巡查点的标准方向角与备用路段a上对应方向角计算点的标准方向角之差的绝对值集合,pan表示绝对值集合pa中的第n个元素,1≤n≤h且n、h均为正整数,pan=|θ[p0-pn]-θ[a0-an]|;
46、s42,巡查平台分别计算出本次巡查中各绝对值集合的均值:
47、
48、其中,表示绝对值集合pa的均值,pai表示绝对值集合pa中的第i个元素,1≤i≤h且i、h均为正整数;
49、s43,巡查平台分别计算出本次巡查中各绝对值集合的标准方差:
50、
51、,其中,σpa表示绝对值集合pa的标准方差,paj表示绝对值集合pa中的第j个元素,1≤j≤h且j、h均为正整数;
52、s44,巡查平台取本次巡查中绝对值集合的标准方差最小的备用路段作为当前巡查终端在本次巡查中的巡查路段
53、优选的,通过地理坐标系下的两坐标点距离计算方法包括以下子步骤:
54、步骤1,记地理坐标系下的两个坐标点x1和x2,记x1的坐标为(x1lon,x1lat),记x2的坐标为(x2lon,x2lat),计算两个坐标点x1和x2之间的球面角c:
55、c=arccos[sin(x2lat)×sin(x1lat)+cos(x2lat)×cos(x1lat)×cos(x2lon-x1lon)],
56、其中,x1lon表示x1的经度,x1lat表示x1的纬度,x2lon表示x2的经度,x2lat表示x2的纬度;
57、步骤2,根据球面角c计算两个坐标点x1和x2之间的弧度c′:
58、步骤3,根据弧度c′计算两个坐标点x1和x2之间的距离len:
59、len=r×c′,其中,r为地球平均半径。
60、本发明还提供一种公路巡查轨迹纠偏方法,基于如上述的一种公路巡查方法:当巡查平台确定当前巡查终端本次巡查的巡查路段后,巡查平台将当前巡查终端本次巡查的巡查轨迹替换成巡查路段的轨迹。
61、本发明还提供一种公路巡查系统,包括:巡查终端、巡查平台、路网数据库、巡查记录数据库,
62、巡查终端被巡查人员/巡查车辆/巡查无人机安装或携带,用于接收巡查平台的信息,并向巡查平台发送巡查终端当前位置信息、巡查状况明细;
63、路网数据库内存储与各巡查终端相对应的巡查区域信息、各巡查区域内待巡查路段信息;
64、巡查平台调用路网数据库在计算后确定各巡查终端的备用路段、巡查路段;
65、巡查平台根据各巡查终端的位置信息确定各巡查终端每次的巡查路段及巡查状况明细,并存储于巡查记录数据库中;
66、各终端、平台、数据库被编程或配置以执行如上述的一种公路巡查方法的步骤。
67、本发明的有益效果在于:
68、(1)本发明的公路巡查方法确定当前巡查终端本次的巡查路段的准确率高,且根据各巡查终端的实时位置,灵活、合理、高效地安排了各巡查终端每轮巡查中每次的巡查路段,提高了携带巡查终端的巡查人员/巡查车辆/巡查无人机的巡查效率,减轻了巡查负担。
69、(2)本发明的公路巡查方法,在每次巡查开始时,基于当前巡查终端的初始点,向巡查终端提供距离较近的备用路段,方便巡查终端就近前往一条备用路段进行巡查,直至本轮巡查结束为止,减少每次巡查的准备时长,进而提升每轮巡查的巡查效率,减轻了巡查的工作负担。
70、(3)本发明的公路巡查方法,只需巡查终端上报巡查点的位置,无需巡查终端返馈巡查路段信息,巡查平台会自动判断出巡查终端在本次巡查中的实际巡查路段,避免了巡查终端上报巡查路段错误的情况发生;同时相较于通过巡查终端上报的巡查点是否落在某条路段上来确定实际巡查路段的现有技术而言,本发明还避免了这种现有技术里由于gps信号漂移给确定实际巡查路段所带来的不良影响,因为gps信号漂移会导致即使巡查人员携带巡查终端在巡查路段上行走,巡查终端的巡查轨迹始终与巡查路段的轨迹有偏移、不重合,此时巡查轨迹如果介于两条相邻的路段之间(或是多个路段部分存在重合的情况下),那么考核人员将无法确定巡查终端究竟巡查了哪条路段。即本发明自动确定巡查路段的过程基本不受gps信号漂移的影响,也无需巡查终端上报巡查路段信息,进一步降低巡查的工作负担。
71、(4)本发明通过距离和方向角两个指标结合起来来衡量巡查轨迹与备用路段的相似程度,科学且准确地确定哪一条备用路段为当前巡查终端本次的巡查路段。本发明按时间顺序将当前巡查终端的各巡查点与巡查终端初始点之间的距离分别记为逐段距离,根据逐段距离在各备用路段上找到对应的方向角计算点,同时辅以锐角的角度限制,使得各备用路段上与巡查点对应的方向角计算点唯一,再计算各备用路段上方向角计算点相对于北极方向的方向角后转化为四象限内的标准方向角,在同一个标准下计算各条备用路段上方向角计算点与巡查轨迹上巡查点之间的标准方向角的标准方差,取标准方差最小的备用路段作为当前巡查终端本次的巡查路段。标准方差最小的备用路段也就意味着该备用路段上的各个方向角计算点的标准方向角与巡查轨迹上对应的巡查点的标准方向角之间相似度最高,该备用路段的整体轨迹与巡查轨迹相似,而实际巡查过程中,巡查终端也一定是在到达被巡查的路段上,再沿着被巡查的路段轨迹进行巡查的,只是由于gps信号漂移会导致巡查轨迹不能完全与巡查路段的轨迹重合,即使是两条走向相同、轨迹相似的备用路段,在通过本发明将这两条备用路段上与巡查点对应位置(即方向角计算点)的标准方向角差异放大(即计算标准方差)后,也可以很清晰的看出真正的巡查路段是那一条备用路段。
72、(5)本发明的公路巡查轨迹纠偏方法可以在科学地确定巡查路段后,通过巡查平台直接将当前巡查终端本次巡查的巡查轨迹替换成巡查路段的轨迹来纠偏,这样在后续的数据分析中,巡查终端的巡查轨迹十分清晰且与路段重合,看起来十分清晰简洁,不会出现巡查轨迹介于两条相邻的路段之间,考核人员无法判断巡查人员究竟巡查了哪条路段,以至于无法确定巡查人员是否存在遗漏巡查路段的情况发生。并且,若巡查平台检测到本次巡查中所有绝对值集合的标准方差均超过第一阈值时,说明当前巡查终端的巡查轨迹与所有的备用路段的轨迹之间均存在较大差异,这可能就不是简单的gps信号漂移所导致的,可能是携带巡查终端的巡查人员/巡查车辆/巡查无人机迷路或巡查了他人巡查区域内的路段所导致的,所以巡查平台向当前巡查终端发送巡查路线错误警告,有助于巡查终端尽快地回到对应巡查区域内最近的路段上继续巡查工作。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187684.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
报警装置及方法、存储介质
下一篇
返回列表