基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法及装置
- 国知局
- 2024-07-31 20:47:21
本发明属于智能交通,具体涉及一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法及装置。
背景技术:
1、交通是城市发展的主要动力,汽车保有量的激增引发了日益严峻的交通堵塞、交通事故及环境污染等问题,严重制约城市社会经济发展。为了促进智能交通系统(intelligent traffic system,简称its)以及智慧城市的发展,多样化的物联网传感器被部署在交通系统中以精准的获取道路上的车辆信息;其中,地磁传感器由于其成本低、抗干扰能力强的特点,在its中正受到逐渐的重视。目前关于地磁传感器应用的研究主要集中在利用几个简单的地磁传感器来对车流量、经过车辆速度等信息进行检测,随着对于地磁传感器的研究不断加深,将多地磁传感器应用于轨迹跟踪系统中,对经过的车辆轨迹进行跟踪的研究正在引起重视。在利用多地磁传感器进行车辆轨迹跟踪时,一个关键问题是,当一辆车身较长,能够引起较大磁场波动的大车在某条车道行驶时,沿该车道路侧部署的地磁传感器可能会检测到该辆大车的两个数据,从而在进行后续的轨迹跟踪时输出了两条车辆轨迹,导致了虚假轨迹的产生,影响了输出轨迹的可信度。
2、相关技术中,交通运输部路网监测与应急处置中心在其共同申请的专利文献“基于雷达和视频融合的车辆轨迹跟踪方法及系统”(申请号:202210867558.4,申请公布号:cn115327527a)中提出一种基于雷达和摄像机融合的单车道车辆轨迹关联方法;该方法通过设置雷达设备和摄像机设备的时间戳同步达到目标轨迹跟踪的目的,通过得到雷达信息的时间戳和摄像机信息的时间戳,实现两者传感器数据关联的方法,进行数据的融合与轨迹生成;该方法存在的不足之处在于,摄像机和雷达等传感器部署环境特殊,通常安装在龙门架上,难以大规模部署,成本较高,且检测精度受天气影响,环境恶劣时会出现难以检测车辆的问题。
3、西安电子科技大学在其申请的专利文献“基于多地磁传感器的单车道车辆轨迹关联方法”(申请号:cn202211663151.6,公开号:cn116386345a)中提出一种将多个地磁传感器等间距的部署在单车道一侧的车道线上,利用多地磁传感器检测车辆到达的时间戳并上传至计算设备,通过计算设备计算出车辆到达地磁传感器的预测时间戳与地磁传感器测量时间做二分图匹配的关联方法,获取经过道路的车辆轨迹信息;然而该方法并没有考虑大车经过时可能会导致地磁传感器误上报多个检测数据的情况,导致其最终的关联结果中可能存在由于大车经过导致的虚假车辆轨迹存在,影响了其使用的可行性。
4、因此,亟需提供一种车辆轨迹跟踪及虚假轨迹的判断方法,改善车辆轨迹跟踪的可靠性。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法及装置。本发明要解决的技术问题通过以下技术方案实现:
2、第一方面,本发明提供一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,包括:
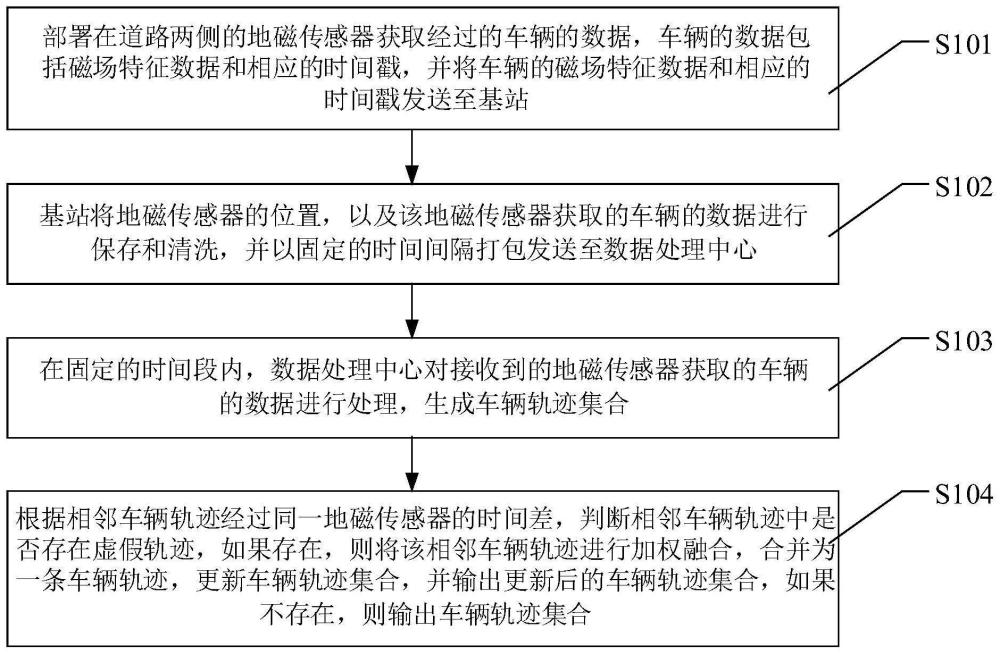
3、部署在道路两侧的地磁传感器获取经过的车辆的数据,车辆的数据包括磁场特征数据和相应的时间戳,并将车辆的磁场特征数据和相应的时间戳发送至基站;
4、基站将地磁传感器的位置,以及该地磁传感器获取的车辆的数据进行保存和清洗,并以固定的时间间隔打包发送至数据处理中心;
5、在固定的时间段内,数据处理中心对接收到的地磁传感器获取的车辆的数据进行处理,生成车辆轨迹集合;
6、根据相邻车辆轨迹经过同一地磁传感器的时间差,判断相邻车辆轨迹中是否存在虚假轨迹,如果存在,则将该相邻车辆轨迹进行加权融合,合并为一条车辆轨迹,更新车辆轨迹集合,并输出更新后的车辆轨迹集合,如果不存在,则输出车辆轨迹集合。
7、第二方面,本发明还提供一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断装置,包括:
8、数据获取模块,用于部署在道路两侧的地磁传感器获取经过的车辆的数据,车辆的数据包括磁场特征数据和相应的时间戳,并将车辆的磁场特征数据和相应的时间戳发送至基站;
9、数据处理中心,用于基站将地磁传感器的位置,以及该地磁传感器获取的车辆的数据进行保存和清洗,并以固定的时间间隔打包发送至数据处理中心;
10、车辆轨迹生成模块,用于在固定的时间段内,数据处理中心对接收到的地磁传感器获取的车辆的数据进行处理,生成车辆轨迹集合;
11、虚假轨迹判断模块,用于根据相邻车辆轨迹经过同一地磁传感器的时间差,判断相邻车辆轨迹中是否存在虚假轨迹,如果存在,则将该相邻车辆轨迹进行加权融合,合并为一条车辆轨迹,更新车辆轨迹集合,并输出更新后的车辆轨迹集合,如果不存在,则输出车辆轨迹集合。
12、本发明的有益效果:
13、本发明提供的一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法及装置,首先在路侧部署地磁传感器,采集车辆经过传感器时的数据;其次,在数据中心利用多地磁传感器的检测数据生成原始车辆轨迹;然后,在生成轨迹的基础上结合贝叶斯滤波方法检测生成轨迹中存在的由于传感器误检测数据导致的虚假轨迹;最后将由误检测数据导致的虚假轨迹的数据与真实轨迹进行融合,消除错误的虚假轨迹,最终输出可信的车辆轨迹信息,本发明所提方法可用于实现公路智能化。
14、以下将结合附图及实施例对本发明做进一步详细说明。
技术特征:1.一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,包括:
2.根据权利要求1所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述在固定的时间段内,所述数据处理中心对接收到的所述地磁传感器获取的车辆的数据进行处理,生成车辆轨迹集合,包括:
3.根据权利要求2所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述数据处理中心依次将每一个地磁传感器获取的车辆的数据与已有的车辆轨迹进行数据关联,包括:
4.根据权利要求2所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述如果已有的车辆轨迹可以在当前地磁传感器关联到车辆的数据,则更新已有的车辆轨迹,包括:
5.根据权利要求2所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,如果已有的车辆轨迹无法在当前地磁传感器关联到车辆的数据,预测该已有的车辆轨迹经过当前地磁传感器的时间,如果该预测时间不超过第一阈值ts,则将该已有的车辆轨迹经过当前地磁传感器的预测时间作为车辆经过该地磁传感器时获取的车辆的数据对应的时间戳进行补齐,如果该时间超过第一阈值ts,则将该已有的车辆轨迹不再与其他车辆数据关联,等待与下一个固定的时间段的车辆数据关联。
6.根据权利要求2所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,如果所有的地磁传感器获取的车辆数据无法与已有的车辆轨迹关联,则将该车辆数据作为车辆轨迹的起始点,参与下一个地磁传感器获取的车辆数据的关联。
7.根据权利要求1所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述判断相邻车辆轨迹中是否存在虚假轨迹,包括:
8.根据权利要求7所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述第一误检事件的概率的表达式为:
9.根据权利要求7所述的基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法,其特征在于,所述第二误检事件的概率的表达式为:
10.一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断装置,其特征在于,包括:
技术总结本发明公开了一种基于多地磁传感器的车辆轨迹跟踪及虚假轨迹的判断方法及装置,包括:部署在道路两侧的地磁传感器获取经过的车辆的数据;基站将地磁传感器的位置,以及该地磁传感器获取的车辆的数据进行保存和清洗,并以固定的时间间隔打包发送至数据处理中心;在固定的时间段内,数据处理中心对接收到的地磁传感器获取的车辆的数据进行处理,生成车辆轨迹集合;根据相邻车辆轨迹经过同一地磁传感器的时间差,判断相邻车辆轨迹中是否存在虚假轨迹,如果存在,则将该相邻车辆轨迹进行加权融合,合并为一条车辆轨迹,更新车辆轨迹集合,并输出更新后的车辆轨迹集合,如果不存在,则输出车辆轨迹集合。本发明能够输出可信的车辆轨迹信息。技术研发人员:任效江,耿英凡,郭洛庚,李长乐,毛国强受保护的技术使用者:西安电子科技大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240731/187785.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。