多场景空地一体无人集控应急移动指挥系统及设备的制作方法
- 国知局
- 2024-07-31 21:02:12
本发明属于交通事故处理,具体涉及多场景空地一体无人集控应急移动指挥系统及设备。
背景技术:
1、随着经济社会的发展以及居民生活水平的提高,越来越多的家庭购买了汽车,车辆的越来越多难免会带来交通拥堵以及交通事故,高速公路上发生交通事故后,一般的处理方法包括设置警示标志、疏导交通、清理现场等工作,其中,警示标志设置包括路锥放置,目前路锥的放置方式主要由人工进行手劢放置和回收,该种方式由于高速公路上快速行驶的车辆而使其对放置回收人员而言十分危险,同时人为摆放的路锥较为杂乱且间距不等,指挥避让效果差。
2、鉴于此,设计多场景空地一体无人集控应急移动指挥系统及设备,以解决上述问题。
技术实现思路
1、为解决上述背景技术中提出的问题。本发明提供了多场景空地一体无人集控应急移动指挥系统及设备,具有全程仅需工作人员操纵,无需亲自摆放,提高指挥安全性,而且摆放的更为整齐,指挥避让效果更为明显的特点。
2、本发明的另一目的是提供多场景空地一体无人集控应急移动指挥设备。
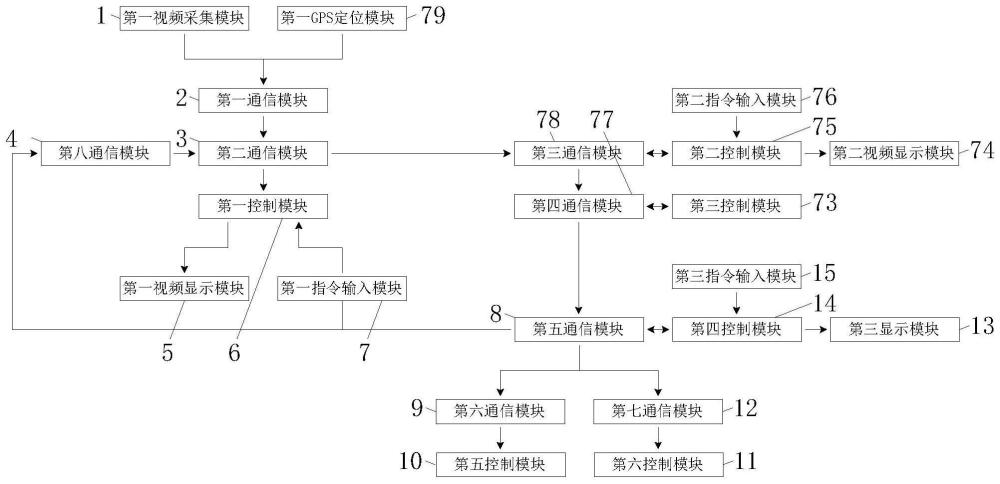
3、为实现上述目的,本发明提供如下技术方案:多场景空地一体无人集控应急移动指挥系统,包括:
4、第一视频采集模块,采集公路上的交通视频;
5、第一gps定位模块,获取公路上采集的交通视频的相应位置坐标信息;
6、第一通信模块,传输采集的交通视频和位置坐标信息以及共享的交通事故视频和位置坐标信息;
7、第二通信模块,接收第一通信模块传输的交通视频和位置坐标信息;
8、第一控制模块,根据程序控制其运行;
9、第一视频显示模块,显示接收到的交通视频和位置坐标信息;
10、第一指令输入模块,第一视频显示模块显示公路上发生交通事故时输入交通事故视频和位置坐标信息共享指令;
11、第三通信模块,接收共享的交通事故视频和位置坐标信息;
12、第二控制模块,根据程序控制其运行;
13、第二视频显示模块,显示接收到的共享交通事故视频和位置坐标信息;
14、第二指令输入模块,根据共享的交通事故视频和位置坐标信息规划出应急移动指挥方案并输入,通过第三通信模块进行传输;
15、第四通信模块,接收第三通信模块传输的应急移动指挥方案;
16、第三控制模块,根据程序控制其运行;
17、第五通信模块,接收第四通信模块传输的应急移动指挥方案以及接收反馈回的交通事故现场移动指挥数据并传输;
18、第四控制模块,根据程序控制其运行;
19、第三显示模块,显示第四通信模块传输的应急移动指挥方案以及接收反馈回的交通事故现场移动指挥数据;
20、第三指令输入模块,根据应急移动指挥方案下发执行指令;
21、第六通信模块,接收执行指令;
22、第五控制模块,执行指令;
23、第七通信模块,接收执行指令;
24、第六控制模块,执行指令;
25、第八通信模块,接收第五通信模块传输的指挥现场反馈数据并经第二通信模块传输至第一视频显示模块,以便进行更为精确的交通事故指挥。
26、多场景空地一体无人集控应急移动指挥设备,包括:高清摄像头、视频监控中心、云控平台、基站、移动指挥机构和云服务器,其中:
27、高清摄像头包括第一装配壳体,第一视频采集模块、第一gps定位模块和第一通信模块集成在第一装配壳体内;
28、视频监控中心包括第二装配壳体,第二通信模块、第一控制模块、第一视频显示模块和第一指令输入模块集成在第二装配壳体内,视频监控中心通过第二通信模块和第一通信模块与高清摄像头通信连接;
29、云控平台包括第三装配壳体,第三通信模块、第二控制模块、第二视频显示模块和第二指令输入模块集成在第三装配壳体内,云控平台通过第三通信模块和第二通信模块与视频监控中心通信连接;
30、基站包括基站架体,第四通信模块和第三控制模块集成在基站架体上,基站通过第四通信模块和第三通信模块与云控平台通信连接;
31、移动指挥机构包括移动指挥车辆,移动指挥车辆车厢内装配有移动指挥组件,第五通信模块、第四控制模块、第三显示模块、第三指令输入模块、第六通信模块、第五控制模块、第七通信模块和第六控制模块集成在移动指挥组件上,移动指挥机构通过第五通信模块和第四通信模块与基站通信连接;
32、云服务器包括第四装配壳体,第八通信模块集成在第四装配壳体上,云服务器通过第八通信模块和第五通信模块与移动指挥机构通信,通过第八通信模块和第二通信模块与视频监控中心通信连接。
33、优选的,所述移动指挥组件包括放置在移动指挥车辆车厢内部的隔板,所述隔板将移动指挥车辆车厢分为上放置腔和下放置腔,所述隔板顶端等间距放置有手持式指挥控制器和多个无人机指挥组件,手持式指挥控制器包括第五装配壳体,第五通信模块、第四控制模块、第三显示模块和第三指令输入模块集成在第五装配壳体上,所述下放置腔内部放置有中空放置架,所述中空放置架内部等间距放置有多个路锥机器人指挥组件,所述无人机指挥组件和中空放置架外放置有密封架,所述密封架与移动指挥车辆车厢间装配有活动封闭机构,所述活动封闭机构与中空放置架间装配有升降机构,无人机指挥组件、路锥机器人组件、活动封闭机构和升降机构与第五通信模块通信连接。
34、优选的,所述无人机指挥组件包括放置在隔板顶端的无人机,所述无人机前侧壁依次固接有第一可编程控制器、第一摄像头和第一激光雷达,第一可编程控制器包括第六装配壳体,第六通信模块和第五控制模块集成在第六装配壳体上,所述无人机底端从前到后依次固接有挂载支架和第一充电电池,所述挂载支架内部从上到下依次固接有第一喊话器和爆闪灯,第一摄像头、第一激光雷达、第一喊话器和爆闪灯与第六通信模块通信连接,第一可编程控制器、第一摄像头、第一激光雷达、第一喊话器和爆闪灯与第一充电电池电连接,第六通信模块与第五通信模块通信连接。
35、优选的,所述路锥机器人组件包括放置在中空放置架内部的底板,所述底板底端装配有行走机构,所述底板前侧壁依次固接有第二摄像头和第二激光雷达,且底板后侧壁固接有第二充电电池,所述底板顶端从前到后依次固接有第二可编程控制器和中空路锥,第二可编程控制器包括第七装配壳体,第七通信模块和第六控制模块装配在第七装配壳体上,所述路锥顶端固接有第二喊话器,行走机构、第二摄像头、第二激光雷达和第二喊话器与第七通信模块通信连接,行走机构、第二摄像头、第二激光雷达、第二可编程控制器和第二喊话器与第二充电电池电连接,第七通信模块与第五通信模块通信连接。
36、优选的,所述行走机构包括固接在底板底端四角的四个第二连接板以及固接在底板顶端位于路锥内部的第三驱动电机和第二驱动电机,前侧以及后侧两个所述第二连接板间分别通过轴承转动连接有行走轴,前侧所述行走轴上位于同侧第二连接板外固定套接有从动锥形轮,所述第三驱动电机输出贯穿底板延伸至下方并固定套接有与从动锥形轮啮合连接的主动锥形轮,所述行走轴上位于同侧两个第二连接板间固定套接有第二驱动齿轮,两个所述第二驱动齿轮间啮合传动连接有第二传动链条,所述行走轴两端分别通过连接转轴转动连接有轮轴,所述轮轴靠近行走轴一端固接有旋转块,所述旋转块顶端固接有驱动轴,所述第二驱动电机输出轴贯穿底板延伸至下方并通过联轴器与一角驱动轴连接,其他三个驱动轴通过轴承与底板底壁连接,所述驱动轴上固定套接有第一驱动齿轮,四个所述第一驱动齿轮间啮合传动连接有第一传动链条,所述轮轴另一端固接有行走轮,第三驱动电机和第二驱动电机与第七通信模块通信连接。
37、优选的,所述活动封闭机构包括对称开设在上放置腔两内壁上的两个滑动槽、对称固接在密封架两外壁上的两个滑动块、固接在密封架内壁上的齿条、固接在移动指挥车辆车厢外壁上的第一驱动电机、放置在上放置腔内部与齿条啮合连接的齿辊,所述滑动槽内部固接有滑动杆,两个滑动块分别延伸至两个滑动槽内并通过开孔套接方法与两个滑动杆活动连接,齿辊一端通过联轴器与第一驱动电机输出轴连接,齿辊另一端通过轴承与移动指挥车辆车厢内壁连接,第一驱动电机与第五通信模块通信连接。
38、优选的,所述升降机构包括固接在中空放置架顶端一侧的安装板、固接在中空放置架顶端两侧以及密封架内壁同侧的两个活动座和固定座,所述安装板上固接有驱动电缸,两个所述活动座和固定座间放置有剪刀式升降架,上方所述活动座内固接有固定杆,剪刀式升降架底端一侧通过轴承连接有延伸至下方活动座内且与驱动电缸输出轴固接的第一延长杆,剪刀式升降架底端另一侧通过轴承与下方固定座连接,剪刀式升降架顶端一侧通过轴承连接有延伸至上方活动座内且与固定杆通过开孔套接方式活动连接的第二延长杆,剪刀式升降架顶端另一侧通过轴承与上方固定座连接,驱动电缸与第五通信模块通信连接。
39、优选的,所述隔板顶端位于手持式指挥控制器下方固接有发电机,所述隔板顶端位于每个无人机下方以及中空放置架底端位于每个底板下方分别固接有蓄电池,所述蓄电池上固接有无线充电发射端,同侧两个所述第二连接板间固接有第一连接板,所述无人机底端中间以及第一连接板靠外侧壁中间分别固接有无线充电接收端,发电机与蓄电池、蓄电池与无线充电发射端、无线充电发射端与无线充电接收端、无线充电接收端与第一充电电池和第二充电电池电连接。
40、与现有技术相比,本发明的有益效果是:
41、本发明通过公路上的高清摄像头实时采集公路的交通视频和定位信息传输至视频监控中心,并在出现交通事故后共享交通事故视频和定位信息至云控平台,云控平台根据交通事故视频和定位信息规划出应急移动指挥方案,并将应急移动指挥方案传输至本地服务器,通过本地服务器和基站通信传输应急移动指挥方案并按照方案进行移动指挥设备的派遣指挥,移动指挥设备根据方案执行无人机指挥组件的先行指挥和路锥机器人组件的后行指挥,使交通现场区域形成后500米无人机爆闪和喊话以及150米隔离带封闭车道的指挥场景,最大程度的提醒到来往车辆避让,提高指挥作用,全程仅需工作人员操纵,无需亲自摆放,提高指挥安全性,而且摆放的更为整齐,指挥避让效果更为明显,同时移动指挥车辆上设置无线充电机构,能够对无人机和路锥机器人进行无线充电,保证电量充足以更好的完成应急移动指挥任务。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188060.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表