一种时空ARMA图卷积网络交通流预测方法
- 国知局
- 2024-07-31 21:11:03
本发明属于交通预测,涉及一种时空arma图卷积网络交通流预测方法。
背景技术:
1、
2、智能交通系统可以通过各种交通传感器、通信和信息技术实现交通流量的实时监测、信号灯智能优化、智能导航、交通管理和控制等功能,达到提高通行效率、减少交通拥堵和提高交通安全性的效果。交通流预测是智能交通系统的重要应用之一,它通过分析历史交通大数据对未来的交通流量进行预测。精准的交通流预测可以辅助驾驶员制定更加快捷的通行路线,辅助交通管理部门制定更有效的交通管理方案,还可以提供实时的交通流量监测和提醒,提高交管部门的应急反应速度。
3、国内外研究人员已经提出了很多交通流预测模型,但是如何精准高效的捕获交通流数据中的周期特征仍然是亟需解决的问题之一。
技术实现思路
1、发明目的:针对传统图卷积网络方法为扩大空间感受野堆叠卷积层,从而导致了过平滑和计算量大的问题,本发明提出了一种时空arma图卷积网络交通流预测方法。该方法使用gru模型提取交通流数据中的时间特征,使用基于arma过滤器的图卷积网络提取交通流数据的空间特征,能够有效提升模型的预测精度。
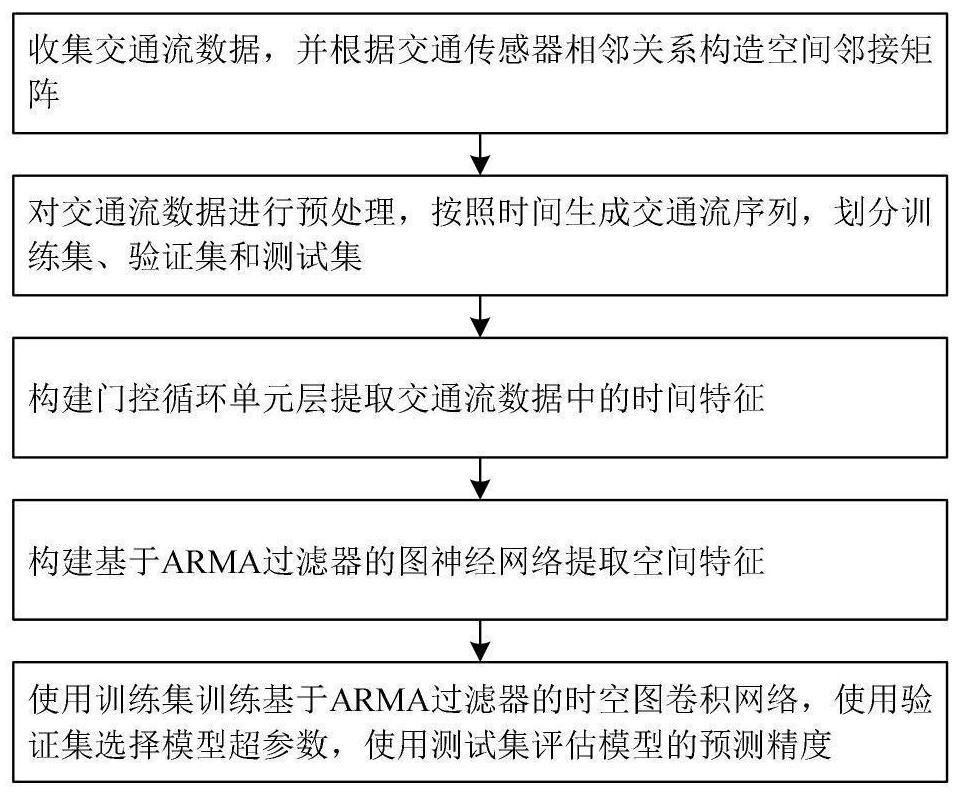
2、技术方案:时空arma图卷积网络的交通流预测方法,包括如下步骤:
3、步骤1,收集交通路网传感器记录的交通流数据,对交通流数据进行预处理,建立数据集,并将其划分为训练集、验证集和测试集;
4、步骤2,根据交通传感器相邻关系构造空间邻接矩阵;
5、步骤3,构建基于门控循环单元的时间特征提取模块;
6、步骤4,构造基于arma过滤器图卷积网络的空间特征提取模块;
7、步骤5,使用训练集训练时空arma图卷积网络,使用验证集选择模型超参数,使用测试集评估模型的预测精度。
8、进一步,所述步骤1中的收集交通路网传感器记录的交通流数据,对交通流数据进行预处理的具体步骤为:
9、步骤1-1:每五分钟采集一次交通传感器的交通流数据,得到交通流数据n表示交通传感器数量,t表示采集的时间跨度;
10、步骤1-2:采用min-max方法对数据进行归一化处理:
11、
12、其中max(x)和min(x)分别表示交通流数据的最大值和最小值;
13、步骤1-3:将处理后的数据按6:2:2的比例划分为训练集、验证集和测试集。
14、进一步,所述步骤2的具体实施步骤包括:
15、步骤2-1:根据传感器相邻关系构造邻接矩阵a;根据选取的交通传感器,第m个传感器和第n个传感器的邻接关系表示为:
16、
17、进一步,所述步骤3的具体步骤如下:
18、步骤3-1:构造门控循环单元层,用于提取交通流数据中的时间特征,计算方式为:
19、z=gru(x');
20、结合后的门控循环单元计算过程为:
21、rt=σ(wirx′t+whrht-1+br)
22、ut=σ(wizx′t+whzht-1+bu)
23、nt=tanh(winx′t+rt⊙(whnht-1+bn))
24、ht=ut⊙ht-1+(1-ut)⊙nt
25、其中⊙是哈达玛积;σ是sigmoid函数;x't是当前时间步t的输入;rt是重置门,用于处理先前记忆的信息;ut是更新门决定存留的信息量;nt表示当前状态信息;w**表示可训练权重,b*是偏置权值;ht是当前时间步的输出和传入下一步的信息,z是提取时间特征后的交通流数据。
26、进一步,所述的步骤4的具体构造步骤为:
27、步骤4-1:构造基于arma过滤器的图卷积块,具体计算方式为:
28、h(l)=σ(mh(l-1)w(l)+zv(l))
29、其中表示归一化的图拉普拉斯矩阵,是邻接矩阵a的度矩阵,h(l)是第l层的输出,和是可训练参数矩阵,lin和lout分别表示输入序列和输出序列长度。在第一层需要对输入数据进行线性变换,令每个堆第一层的参数使各层的输出为
30、步骤4-2:构造基于arma过滤器的图卷积神经网络层,用于提取交通流数据中的空间特征,基于arma过滤器的图卷积神经网络层包含s个互相独立的堆,每个堆包含l层arma图卷积块,将各个堆的输出求均值得到临近特征输出矩阵,计算方式为:
31、
32、其中是第s个堆第l层的输出值,是交通流的预测值。
33、进一步,所述步骤5中,使用训练集训练基于arma过滤器的图卷积网络,然后用验证集验证模型的训练效果并选取模型的最佳超参数,最后用测试集测试模型的预测精度,具体步骤如下:
34、步骤5-1:设置训练过程的全局超参数,包括学习率、学习率下降速率和批处理大小;
35、步骤5-2:确定模型的各项超参数的取值范围,包括基于arma过滤器的图卷积网络层的层数和堆数、门控循环单元的层数和隐藏单元数、模型的输入输出维度,并初始化各项权重参数矩阵;
36、步骤5-3:利用训练集训练模型,并使用均方误差作为损失函数,通过模型正向传播、误差反向传播、随机梯度下降法和学习率衰减法来迭代更新模型的各项权重;
37、步骤5-4:使用验证集验证模型的预测结果,计算各组超参数下模型的预测精度,并选取预测精度最佳的超参数用于测试集预测;
38、步骤5-5:将测试集输入模型,测试模型的预测精度。
39、有益结果:本发明的交通流预测方法,该方法针对传统图卷积网络方法为扩大空间感受野堆叠卷积层,从而导致了过平滑和计算量大的问题,本发明通过构建基于arma过滤器的图卷积网络有效解决了过平滑问题,并通过并行计算的方式进行多次训练有效提升了模型的适应性,提高了模型的预测精度,同时降低了模型的训练时间。
40、本发明与现有技术相比,其显著优点为:
41、1)本发明使用基于arma过滤器的图卷积神经网络提取模型的空间特征,避免了现有的图卷积网络存在的过拟合问题,在扩大空间感受野的同时,保证了节点保留其原有特征,有效提升了图卷积网络提取空间特征的能力。
42、2)本发明的基于arma过滤器的图卷积神经网络层使用多个互相独立的堆进行并行计算,提升了模型的鲁棒性和计算效率。
43、下面结合附图对本发明作进一步详细描述。
技术特征:1.一种时空arma图卷积网络交通流预测方法,其特征在于:所述方法包含以下步骤:
2.根据权利要求1所述的时空arma图卷积网络的交通流预测方法,其特征在于:所述步骤1中的收集交通路网传感器记录的交通流数据,对交通流数据进行预处理,具体步骤为:
3.根据权利要求1所述的时空arma图卷积网络的交通流预测方法,其特征在于:所述步骤2空间邻接矩阵具体生成步骤为:
4.据权利要求1所述的时空arma图卷积网络的交通流预测方法,其特征在于:所述步骤3的时间特征提取模块具体步骤为:构造基于门控循环单元的时间特征提取模块,用于提取交通流数据中的时间特征,计算方式为:
5.据权利要求1所述的时空arma图卷积网络的交通流预测方法,其特征在于:所述的步骤4的基于arma过滤器的图卷积网络的具体生成步骤为:
6.据权利要求1所述的时空arma图卷积网络的交通流预测方法,其特征在于:所述步骤5中,使用训练集训练时空arma图卷积网络,然后使用验证集验证模型的训练效果并选取模型的最佳超参数,最后用测试集测试模型的预测精度,具体步骤如下:
技术总结本发明提供了一种时空ARMA图卷积网络交通流预测方法,步骤如下:收集交通路网传感器记录的交通流数据,对交通流数据进行预处理,建立数据集,并将其划分为训练集、验证集和测试集;根据交通传感器相邻关系构造空间邻接矩阵;使用门控循环单元提取交通流数据中的时间特征;使用基于ARMA过滤器的图神经网络提取空间特征;使用训练集训练时空ARMA图卷积网络,使用验证集选择模型超参数,使用测试集评估模型的预测精度。本发明通过构建时空ARMA图卷积网络,有效提取了交通流数据中的空间特征和时间特征,提高了模型的预测精度。技术研发人员:曹阳,肖培成,沈琴琴,施佺,翟志鹏,吴伶,鲁思源,曹晨洋受保护的技术使用者:南通大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240731/188741.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表