一种智慧交通管理系统及方法与流程
- 国知局
- 2024-07-31 21:11:07
本发明涉及智慧交通,具体来说,涉及一种智慧交通管理系统及方法。
背景技术:
1、随着社会的进步和科技水平的不断提高,城市交通体系的管理不断迈向自动化、快速化和智能化。
2、目前使用的汽车导航系统已经利用gps实现了相对精确的电子地图定位,但是现有的导航系统只能实现跟踪、导航。而且现有导航仪品牌众多、标准各异,所以各品牌导航仪之间不能进行信息交互、共享,也就是说交通网中的各个临近车辆之间不能实现信息实时交换共享。
3、另一方面,城市交通和高速路上的交通事故频发,给人们的生命财产安全造成了不可挽回的损失,为了有效的避免交通事故的发生,尤其是要避免在高速路上或者恶劣天气条件下的交通事故,人们正在开发能够预防性的避免车辆碰撞等交通事故的发生的技术方案。
4、在众多的车辆防碰撞体统中,其中有一种方案是,使用现有的车辆导航装置对前端车辆信息采集,类似互联网中的客户端服务器模式(c/s),前端车辆为客户端,后台服务器作为中心端,部分汽车厂商甚至实现了对同品牌的车辆位置信息进行共享(基于前面提到的c/s模式),通过服务器下发给前端汽车。目前这些功能的实现主要基于无线互联网络。但是这种共享带有很大的局限性,无法服务于运行在道路上的所有车辆,只能作为其自身产品附加功能亮点,同时这种c/s架构在信息传递的实时性方面较差,易受外界环境干扰,无法成为近距离车辆相对位置判定的有效途径,无法快速有效的避免碰撞。
5、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种智慧交通管理系统及方法,以克服现有相关技术所存在的上述技术问题。
2、本发明的技术方案是这样实现的:
3、本发明一方面:
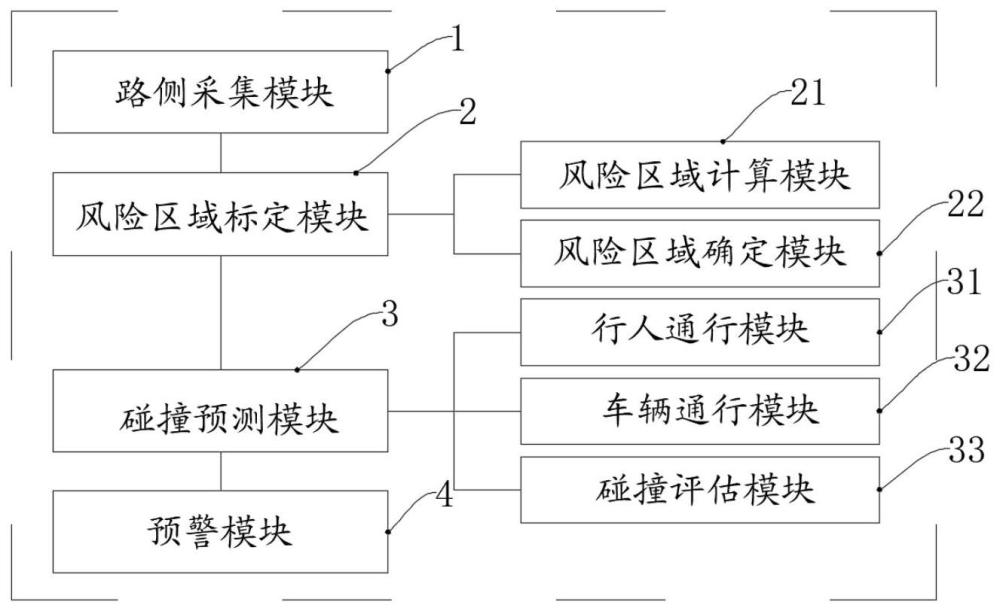
4、一种智慧交通管理系统,包括:
5、路侧采集模块,用于获取行人和车辆运动状态信息,并对行人和车辆的行动轨迹进行预测;
6、风险区域标定模块,用于获取行人和车辆位置关系,其中,至少包括:计算车辆横向风险区域,并确定当前行人是否处于横向风险区域;
7、碰撞预测模块,用于对当前行人处于横向风险区域,获取行人和车辆的纵向相对距离对行人碰撞进行预测;
8、预警模块,用于获取预测结果,对预测结果进行分级预警,并根据分级预警进行适应性提醒行人或车辆的运动状态。
9、进一步的,所述路侧采集模块,包括:分别布置于弯前直线路段和道路右转弯段的微波雷达和布置弯道前斑马线路段的上方的红外相机,其中;
10、所述微波雷达,用于分别检测弯前路段上是否有车辆通过以及车辆的行动轨迹和右转弯范围内当前车辆的运行速度;
11、所述红外相机,用于间断采集当前弯道前斑马线路段的图像信息,确定当前行人的行动轨迹以及行人的运行速度。
12、进一步的,所述风险区域标定模块,包括:风险区域计算模块和风险区域确定模块,其中;
13、所述风险区域计算模块,用于计算车辆横向风险区域的宽度s,表示为:
14、s=2w-d;
15、其中,w为右转车道宽度,d为车辆的宽度;
16、所述风险区域确定模块,用于根据当前车辆横向风险区域宽度s,确定当前行人是否处于横向风险区域。
17、进一步的,所述碰撞预测模块,包括:
18、行人通行模块,用于获取行人通过车辆横向风险区域宽度s的时间tcross,表示为:
19、
20、其中,行人通过横向风险区域宽度s的剩余距离为lcross,vped为行人当前过街速度;
21、车辆通行模块,计算车辆到达行人当前位置的行驶时间tvel,表示为:
22、
23、其中,lvel为车辆与行人之间的纵向相对距离,vvel为车辆当前纵向行驶速度;
24、碰撞评估模块,用于对比行人通过车辆横向风险区域宽度s的时间tcross和车辆到达行人当前位置的行驶时间tvel,判断行人与车辆是否会发生碰撞,包括以下步骤:
25、其中,若tvel>tcross,则预测行人在车辆到达前通过横向风险区域,则不会发生碰撞,车辆可正常通行;
26、其中,若tvel≤tcross,则预测车辆在行人通过横向风险区域过程中到达行人过街位置,则有碰撞风险。
27、本发明另一方面:
28、一种智慧交通管理方法,包括以下步骤:
29、步骤s1,预先获取行人和车辆运动状态信息,并对行人和车辆的行动轨迹进行预测;
30、步骤s2,获取行人和车辆位置关系,其中,包括:计算车辆横向风险区域,并确定当前行人是否处于横向风险区域,其中,包括:
31、步骤s201,若当前行人处于横向风险区域,则获取行人和车辆的纵向相对距离对行人碰撞进行预测;
32、步骤s3,获取预测结果,对预测结果进行分级预警,并根据分级预警进行适应性提醒行人或车辆的运动状态。
33、其中,步骤所述预先获取行人和车辆运动状态信息,包括以下步骤:
34、步骤s101,预先通过弯前直线路段和道路右转弯段分别布置微波雷达,用于分别检测弯前路段上是否有车辆通过以及车辆的行动轨迹和右转弯范围内当前车辆的运行速度;
35、步骤s102,进行对弯道前斑马线路段的上方布置红外相机,间断采集当前弯道前斑马线路段的图像信息,确定当前行人的行动轨迹以及行人的运行速度。
36、其中,步骤所述获取行人和车辆位置关系,包括以下步骤:
37、步骤s201,根据道路右转弯段布置微波雷达和弯道前斑马线路段的红外相机,获取当前行人和车辆位置关系,其中,至少包括:确定当前行人是否处于横向风险区域。
38、其中,步骤所述确定当前行人是否处于横向风险区域,包括以下步骤:
39、步骤s202,预先计算车辆横向风险区域宽度s,表示为:
40、s=2w-d;
41、其中,w为右转车道宽度,d为车辆的宽度;
42、步骤s203,根据当前车辆横向风险区域宽度s,确定当前行人是否处于横向风险区域。
43、其中,步骤所述获取行人和车辆的纵向相对距离对行人碰撞进行预测,包括以下步骤:
44、步骤s204,若当前行人进入车辆横向风险区域宽度s,进行获得未来一段时间内车辆和行人的轨迹,包括以下步骤:
45、步骤s205,获取行人通过车辆横向风险区域宽度s的时间tcross,表示为:
46、
47、其中,行人通过横向风险区域宽度s的剩余距离为lcross,vped为行人当前过街速度;
48、步骤s206,计算车辆到达行人当前位置的行驶时间tvel,表示为:
49、
50、其中,lvel为车辆与行人之间的纵向相对距离,vvel为车辆当前纵向行驶速度;
51、步骤s207,进行对比行人通过车辆横向风险区域宽度s的时间tcross和车辆到达行人当前位置的行驶时间tvel,判断行人与车辆是否会发生碰撞,包括以下步骤:
52、其中,若tvel>tcross,则预测行人在车辆到达前通过横向风险区域,则不会发生碰撞,车辆可正常通行;
53、其中,若tvel≤tcross,则预测车辆在行人通过横向风险区域过程中到达行人过街位置,则有碰撞风险。
54、其中,步骤所述预测结果进行分级预警,并根据分级预警进行适应性提醒行人或车辆的运动状态,包括以下步骤:
55、步骤s301,预设设定避险阈值bx,若当前有碰撞风险,获取碰撞时间pt,表示为:
56、pt=tvel-tcross;
57、其中,pt<bx,则表示为i级预警,通过道路预警设备发送i级预警信息,进行提醒行人与车辆通行注意安全;
58、其中,pt=bx,则表示为ii级预警,通过道路预警设备发送ii级预警信息,进行提醒行人与车辆通行注意安全,并着重提醒车辆减速避让行人;
59、其中,pt>bx,则表示为iii级预警,通过道路预警设备发送iii级预警信息,进行提醒行人与车辆通行注意安全,并着重提醒车辆紧急停止避让行人。
60、本发明的有益效果:
61、本发明智慧交通管理系统及方法,通过预先获取行人和车辆运动状态信息,并对行人和车辆的行动轨迹进行预测,计算车辆横向风险区域,确定当前行人是否处于横向风险区域,获取行人和车辆位置关系,其中若当前行人处于横向风险区域,则获取行人和车辆的纵向相对距离对行人碰撞进行预测,同时,根据预测结果,对预测结果进行分级预警,并根据分级预警进行适应性提醒行人或车辆的运动状态,进行实现智慧交通管理,不仅达到全方位实时预警的效果,而且配置成本低,响应及时,解决了传统无法服务于运行在道路上的所有车辆,只能作为其自身产品附加功能亮点,同时能够使车辆及时发现潜在的碰撞风险,并提前做好行驶轨迹规划,能够极大提高道路的安全性,有效减少车辆右转盲区事故的发生,对智慧交通有广泛的应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188746.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表