一种用于医院的人脸识别考勤机器人的制作方法
- 国知局
- 2024-07-31 22:23:20
本发明涉及考勤打卡机,特别涉及一种用于医院的人脸识别考勤机器人。
背景技术:
1、简单的医用考勤机器人比较常见的就是考勤打卡机,其体积较小,便于转移及安装,因此被广泛应用于办公环境内。其结构由外壳、内部模块、指纹识别膜、人脸识别窗口以及面板按键等部分组成。为了便于管理还会设置有便于管理拷贝的usb接口。
2、其中,指纹按键使用一段时间后,往往会出现指纹录入不灵活的情况,这一情况的发生极少是因为指纹膜出现问题,多数情况下是手指纹理出汗或污渍等原因引起的遮盖,需要擦拭才能正常录入,而现有的指纹录入区缺少擦拭功能,造成使用不便。因此在指纹区如何合理的设置这一功能,是当下所要解决的问题。
技术实现思路
1、为了解决上述问题,本发明的技术方案是,提出了一种用于医院的人脸识别考勤机器人,其包括:
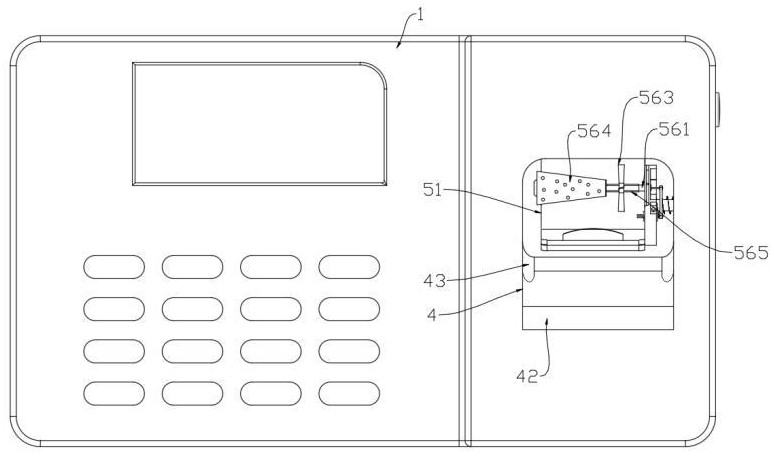
2、前壳体、后壳体,以及设置在前壳体与后壳体之间的模块,前壳体的右侧开设有装配孔,装配孔内设置有指纹打卡机构;指纹打卡机构包括翘板,和安装在翘板上的指纹膜;翘板的顶端进入前壳体内,翘板的底端伸入装配孔内且设有朝前下方向倾斜的翘端,指纹膜位于翘端上,且信号输送端进入前壳体内并连接于模块;翘端的侧部固定有装配板,装配板上安装有第一转轴,装配板通过第一转轴转接在前壳体与后壳体之间;指纹打卡机构还包括指纹处理组件,还包括固定在装配板上的微型电机,指纹处理组件包括通过轴承安装在装配板上且平行在指纹膜上方的第二转轴,以及惯性安装在摩擦辊上的叶轮,第二转轴制动时,叶轮还会在摩擦辊上单独旋转;微型电机的动力轴通过带传动的方式与第二转轴传动连接;指纹打卡机构还包括固定在前壳体内且位于翘板顶端内侧的按压开关,按压开关电性连接微型电机。
3、作为进一步优选的,装配板背对于第二转轴的一面开设有第一限位槽,装配孔面向第一限位槽的一面开设有第二限位槽,第一转轴上套有扭簧,扭簧的两个限制端分别卡接在第一限位槽和第二限位槽内。
4、作为进一步优选的,装配孔的底端设有朝着前下方向倾斜的斜坡。
5、作为进一步优选的,装配板为圆形,沿其圆形面开设有线槽,线槽的一端接近前壳体的内腔,微型电机的接电端贯穿至装配板的内面,线槽的另一端接近微型电机的接电端。
6、作为进一步优选的,装配孔的两侧设有光滑的圆角面,圆角面对称在翘端的两侧。
7、作为进一步优选的,摩擦辊由外层的橡胶辊面和内层的橡胶套管构成,橡胶辊面与橡胶套管之间设有集风腔,橡胶辊面上环形阵列的开设有若干个气孔,若干个气孔的内端与集风腔相通,叶轮通过轴承安装在橡胶套管上,橡胶套管紧密套装在第二转轴上,叶轮与橡胶套管之间留有间隙,橡胶套管远离间隙的一端设有将集风腔遮挡的闭合板,离橡胶辊面是朝着间隙的一端逐渐变细的锥形面,叶轮旋转时产生的部分气流由橡胶辊面的锥形小径端吹向大径端,产生的另一部分气流进入集风腔内。
8、作为进一步优选的,橡胶辊面是毛面。
9、作为进一步优选的,装配孔的侧壁上开设有退位腔,退位腔与第二转轴在同一水平轴线上,退位腔向前开设有与其内腔前后相通的让位腔。
10、本发明相比于现有技术的有益效果是:
11、手指按在指纹膜上打卡时,相当于手指按在翘端上轻压录入指纹时,如果录入正常,则证明指肚上的纹理正常。但是如果轻按指纹膜录入不灵敏时,稍用力按压指纹膜使翘端向下偏转,由翘端带着装配板逆时针旋转,由装配板带着第一转轴逆时针旋转,翘板的顶端将会朝前旋转并压在按压开关上,按压开关接通模块中的直流电源,并接通微型电机自动启动并带着第二转轴旋转,第二转轴延伸旋转时将会产生两个作用:第一个作用体现在带着摩擦辊同步旋转,当指纹录入灵敏度不高时,将指肚转移到摩擦辊上经过摩擦后使纹理变为清晰,再次轻按指纹膜完成录入。第二个作用体现在摩擦辊还会带着叶轮旋转,即使叶轮是通过轴承安装在摩擦辊上,但是也会因为轴承的阻尼大于摩擦辊旋转时的离心力,跟着摩擦辊旋转,特别是延时后微型电机瞬间停转时,叶轮会在摩擦辊制动时产生的惯性力仍然旋转,而此时指肚离开摩擦辊,叶轮上叶片朝向摩擦辊的表面,也倾向指纹膜,利用叶轮旋转时产生的气流吹向指肚及摩擦辊,将摩擦时脱落在辊面以及指纹膜上的附着物向下吹落。
12、微型电机的启动,是通过指纹录入时出现灵敏度异常再次用力按压翘板完成的即时操作,摩擦与摩擦后的清理功能便于操作。
技术特征:1.一种用于医院的人脸识别考勤机器人,包括前壳体(1)、后壳体(2),以及设置在前壳体(1)与后壳体(2)之间的模块(3),其特征在于:前壳体(1)的右侧开设有装配孔(4),装配孔(4)内设置有指纹打卡机构(5);指纹打卡机构(5)包括翘板(51),和安装在翘板(51)上的指纹膜(52);翘板(51)的顶端进入前壳体(1)内,翘板(51)的底端伸入装配孔(4)内且设有朝前下方向倾斜的翘端(53),指纹膜(52)位于翘端(53)上,且信号输送端进入前壳体(1)内并连接于模块(3);翘端(53)的侧部固定有装配板(54),装配板(54)上安装有第一转轴(55),装配板(54)通过第一转轴(55)转接在前壳体(1)与后壳体(2)之间;指纹打卡机构(5)还包括指纹处理组件(56),还包括固定在装配板(54)上的微型电机(57),指纹处理组件(56)包括通过轴承安装在装配板(54)上且平行在指纹膜(52)上方的第二转轴(561),安装在第二转轴(561)上的摩擦辊(562),以及惯性安装在摩擦辊(562)上的叶轮(563),第二转轴(561)制动时,叶轮(563)还会在摩擦辊(562)上单独旋转;微型电机(57)的动力轴通过带传动的方式与第二转轴(561)传动连接;指纹打卡机构(5)还包括固定在前壳体(1)内且位于翘板(51)顶端内侧的按压开关(58),按压开关(58)电性连接微型电机(57)。
2.根据权利要求1所述的用于医院的人脸识别考勤机器人,其特征在于,装配板(54)背对于第二转轴(561)的一面开设有第一限位槽(541),装配孔(4)面向第一限位槽(541)的一面开设有第二限位槽(41),第一转轴(55)上套有扭簧(6),扭簧(6)的两个限制端分别卡接在第一限位槽(541)和第二限位槽(41)内。
3.根据权利要求2所述的用于医院的人脸识别考勤机器人,其特征在于,装配孔(4)的底端设有朝着前下方向倾斜的斜坡(42)。
4.根据权利要求3所述的用于医院的人脸识别考勤机器人,其特征在于,装配板(54)为圆形,沿其圆形面开设有线槽(542),线槽(542)的一端接近前壳体(1)的内腔,微型电机(57)的接电端贯穿至装配板(54)的内面,线槽(542)的另一端接近微型电机(57)的接电端。
5.根据权利要求4所述的用于医院的人脸识别考勤机器人,其特征在于,装配孔(4)的两侧设有光滑的圆角面(43),圆角面(43)对称在翘端(53)的两侧。
6.根据权利要求5所述的用于医院的人脸识别考勤机器人,其特征在于,摩擦辊(562)由外层的橡胶辊面(564)和内层的橡胶套管(565)构成,橡胶辊面(564)与橡胶套管(565)之间设有集风腔(566),橡胶辊面(564)上环形阵列的开设有若干个气孔(567),若干个气孔(567)的内端与集风腔(566)相通,叶轮(563)通过轴承(7)安装在橡胶套管(565)上,橡胶套管(565)紧密套装在第二转轴(561)上,叶轮(563)与橡胶套管(565)之间留有间隙(568),橡胶套管(565)远离间隙(568)的一端设有将集风腔(566)遮挡的闭合板(569),离橡胶辊面(564)是朝着间隙(568)的一端逐渐变细的锥形面,叶轮(563)旋转时产生的部分气流由橡胶辊面(564)的锥形小径端吹向大径端,产生的另一部分气流进入集风腔(566)内。
7.根据权利要求6所述的用于医院的人脸识别考勤机器人,其特征在于,橡胶辊面(564)是毛面。
8.根据权利要求7所述的用于医院的人脸识别考勤机器人,其特征在于,装配孔(4)的侧壁上开设有退位腔(44),退位腔(44)与第二转轴(561)在同一水平轴线上,退位腔(44)向前开设有与其内腔前后相通的让位腔(45)。
技术总结本发明涉及考勤打卡机技术领域,解决了指纹录入不灵敏,缺少解决这一问题功能的问题,尤其是提供了一种用于医院的人脸识别考勤机器人,包括前壳体、后壳体,以及设置在前壳体与后壳体之间的模块,前壳体的右侧开设有装配孔,装配孔内设置有指纹打卡机构;指纹打卡机构包括翘板,和安装在翘板上的指纹膜;翘板的顶端进入前壳体内,翘板的底端伸入配孔内且设有朝前下方向倾斜的翘端,指纹膜位于翘端上,且信号输送端进入前壳体内并连接于模块;翘端的侧部固定有装配板,当指纹录入灵敏度不高时,将指肚转移到摩擦辊上经过摩擦后使纹理变为清晰,再次轻按指纹膜完成录入。技术研发人员:孔子南,张传利,灿宇达,王立,胡吉意,李文明,严昌慈受保护的技术使用者:江苏迈泰克医疗科技有限公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240731/193138.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表