一种无人机干扰反制设备
- 国知局
- 2024-08-02 12:26:16
本技术涉及无人机干扰,具体为一种无人机干扰反制设备。
背景技术:
1、无人机反制技术是一种利用电磁波、无线电波等手段,干扰、破坏或阻止无人机正常飞行的技术。目前,从技术上来说,阻止无人机飞行的方案大体分为如下两种: 一是利用物理手段阻止,如使用防飞无人机锁、无人机降落网等工具,直接将无人机捕捉或降落,这种方法的优点是简单易行;二是利用技术手段阻止,包括使用无人机干扰器、无人机黑匣子等设备,通过干扰无人机的通信、电力等系统,使无人机无法正常飞行,这种方法的优点是相对安全。
2、目前利用物理手段对无人机反制的技术通常是采用多个飞行器连接在捕捉网的各个端角处,通过多个飞行器的的飞行路径的调整实现对目标的捕捉,如公开号为cn114153223a公布的一种对集群无人机的网式捕捉系统及方法,所述系统包括指挥控制车,在指挥控制车上安装有导弹发射模块,用于装载导弹和抓捕网和对无人机群进行探测跟踪和对导弹的发射制导进行控制;导弹发射模块包括导弹发射箱,在导弹发射箱内安装有捕捉网包,在捕捉网包内设置有捕捉网,发射箱内放置有多枚导弹,每枚导弹上均系有牵引绳,通过牵引绳与捕捉网连接,在导弹发射箱设置有导弹用的发射孔和捕捉网弹出用的孔洞;本发明实现对无人机群的反制,适用于对重要机动目标的伴随防护;机动性强,可以实现对无人机群的网式抓捕,从而保护重要的机动性武器平台、军事目标等。但上述方案着重实现对目标捕捉后的打击和摧毁,而难以在捕捉目标后使目标无人机保持完整,因此,难以对捕捉后的无人机进行逆向工程分析。为此,我们提出一种能够将目标无人机进行截获的无人机干扰反制设备。
技术实现思路
1、本实用新型的目的在于提供一种无人机干扰反制设备,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种无人机干扰反制设备,包括柔性捕捉网和牵引机,柔性捕捉网能够通过形变改变捕捉方向,便于对捕捉的方向进行快速调整,牵引机的顶部设置有跳绳结构,跳绳结构用于调整旋转臂与牵引机机身二者之间的位置,通过启动舵机组,舵机组的输出端通过带动平衡臂转动而进一步带动旋转臂在竖直方向转动,当旋转臂以平衡臂的径直方向为轴转动180°时,则能够调整牵引机位于旋转臂的上方,从而旋转臂牵引捕捉网下移,调整捕捉网网面的方向,便于对造成干扰的无人机实现快速捕获,捕捉网能够以跳绳结构为旋转中心做圆周运动改变捕捉方向,捕捉网的边沿处通过牵引绳与跳绳结构连接,跳绳结构包括舵机组,舵机组的两个相对侧面分别通过输出端连接有平衡臂,平衡臂的一端通过连接管垂直固定有铰接板,铰接板的顶端通过锁紧杆固定连接有旋转臂,旋转臂为直杆,旋转臂的长度大于牵引机的机身长,使牵引机能够与旋转臂之间相互做圆周运动,从而调整旋转臂与牵引机机身之间的相对位置,旋转臂的顶端与牵引绳固定,牵引机的顶部安装有信号屏蔽器,信号屏蔽器用于屏蔽对造成干扰的无人机的信号,截断被捕捉无人机信号的收发。
3、作为本实用新型进一步的方案:舵机组的底部与牵引机的顶部固定,舵机组关于牵引机的机身对称。
4、作为本实用新型进一步的方案:舵机组包括两个相对安装的舵机,两个舵机的输出端中心轴共线,两个舵机的输出端能够分别带动一个平衡臂在竖直方向转动。
5、作为本实用新型进一步的方案:平衡臂关于舵机组的二等分面对称安装,平衡臂为柱形杆,对称的平衡臂有利于保持牵引机机身的平稳性。
6、作为本实用新型进一步的方案:平衡臂为伸缩气缸,便于调整平衡臂的长度,适应连接不同面积大小的捕捉网。
7、作为本实用新型进一步的方案:捕捉网为柔性尼龙网,捕捉网的表面开设有多个三角形网孔,有利于增加捕捉网的韧性。
8、作为本实用新型进一步的方案:捕捉网为柔性金属丝网,有利于增加捕捉网的耐磨性。
9、作为本实用新型进一步的方案:连接管的一端安装有照明灯,照明灯作为补光装置。
10、作为本实用新型进一步的方案:旋转臂的顶端开设有连接孔,连接孔能够与牵引绳连接。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过跳绳结构调整旋转臂与牵引机机身二者之间的位置,通过舵机组的输出端通过带动平衡臂转动而进一步带动旋转臂在竖直方向转动,当旋转臂以平衡臂的径直方向为轴转动180°时,则能够调整牵引机位于旋转臂的上方,从而旋转臂牵引捕捉网下移,通过三个牵引机所连接的旋转臂同时调整捕捉网网面的方向,能够快速改变捕捉网的捕捉方向,从而对造成干扰的无人机实现快速捕获。
13、2、本实用新型通过设置平衡臂为伸缩气缸,便于调整平衡臂的长度,适应连接不同面积大小的捕捉网,通过设置平衡臂关于舵机组的二等分面对称安装,有利于保持牵引机机身的平稳性。
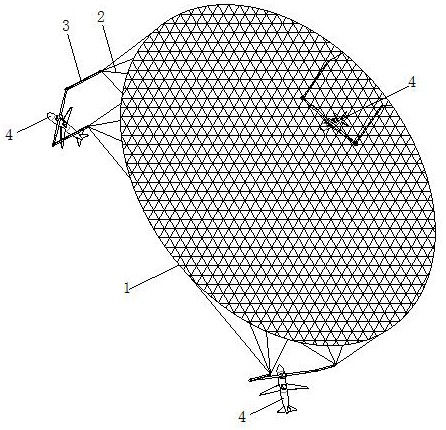
技术特征:1.一种无人机干扰反制设备,其特征在于,包括柔性捕捉网(1)和牵引机(4),牵引机(4)的顶部设置有跳绳结构,捕捉网(1)能够以跳绳结构为旋转中心做圆周运动改变捕捉方向,捕捉网(1)的边沿处通过牵引绳(2)与跳绳结构连接,跳绳结构包括舵机组(5),舵机组(5)的两个相对侧面分别通过输出端连接有平衡臂(6),平衡臂(6)的一端通过连接管(7)垂直固定有铰接板(9),铰接板(9)的顶端通过锁紧杆(10)固定连接有旋转臂(3),旋转臂(3)的长度大于牵引机(4)的机身长,旋转臂(3)的顶端与牵引绳(2)固定,牵引机(4)的顶部安装有信号屏蔽器(11)。
2.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:舵机组(5)的底部与牵引机(4)的顶部固定。
3.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:舵机组(5)包括两个相对安装的舵机,两个舵机的输出端中心轴共线。
4.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:平衡臂(6)关于舵机组(5)的二等分面对称安装,平衡臂(6)为柱形杆。
5.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:平衡臂(6)为伸缩气缸。
6.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:捕捉网(1)为柔性尼龙网,捕捉网(1)的表面开设有多个三角形网孔。
7.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:捕捉网(1)为柔性金属丝网。
8.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:连接管(7)的一端安装有照明灯(8)。
9.根据权利要求1所述的一种无人机干扰反制设备,其特征在于:旋转臂(3)的顶端开设有连接孔(301)。
技术总结本技术公开了一种无人机干扰反制设备,涉及无人机干扰技术领域,包括柔性捕捉网和牵引机,牵引机的顶部设置有跳绳结构,跳绳结构包括舵机组,舵机组的两个相对侧面分别通过输出端连接有平衡臂,平衡臂的一端通过连接管垂直固定有铰接板。本技术通过跳绳结构调整旋转臂与牵引机机身二者之间的位置,通过舵机组的输出端通过带动平衡臂转动而进一步带动旋转臂在竖直方向转动,当旋转臂以平衡臂的径直方向为轴转动180°时,则能够调整牵引机位于旋转臂的上方,从而旋转臂牵引捕捉网下移,通过三个牵引机所连接的旋转臂同时调整捕捉网网面的方向,能够快速改变捕捉网的捕捉方向,从而对造成干扰的无人机实现快速捕获。技术研发人员:叶雨灵,姚娅川受保护的技术使用者:四川轻化工大学技术研发日:20231122技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240802/236070.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表