移动机器人路径规划方法、装置、设备及存储介质
- 国知局
- 2024-08-05 11:38:08
本文件涉及机器人路径规划,尤其涉及一种移动机器人路径规划方法、装置、设备及存储介质。
背景技术:
1、路径规划作为移动机器人的核心技术之一,其主要功能是根据给定的环境地图与任务目标,在已知约束条件下,规划出一条由起点向目标位置转移的行驶路径,是确保移动机器人正常作业的关键。目前关于移动机器人路径规划的算法层出不穷,主要有人工蜂群算法、a*算法、遗传算法、蚁群优化算法、粒子群优化算法等群体智能算法。蝠鲼觅食优化算法(manta ray foraging optimization,mrfo)是在2020年提出的一种模拟海洋生物蝠鲼种群觅食海洋浮游生物时表现出的社会行为的智能优化算法。蝠鲼的觅食行为由三部分构成:链式觅食、螺旋觅食和翻滚觅食。该算法实现原理简单,依赖参数少,其性能已经优于传统粒子群算法pso、蜂群优化算法abc和引力搜索算法gsa等。
2、然而,该算法存在一些缺陷,主要有以下几点:(1)收敛速度慢,原始算法种群初始化过程采用了随机分布方式,不能使初始个体尽可能均匀遍布在搜索区域,易于导致种群的多样性缺乏,进而导致陷入局部搜索。算法早期搜索存在无向盲目性,降低寻优精度导致算法收敛速度慢,搜索效率低。(2)搜索范围小,全局搜索能力弱,对于决定了个体搜索步长的权重因子α和β,其更新方式跳跃性不足,算法全局搜索能力有待提升。(3)搜索过程中易陷入局部最优,决定了翻滚距离的翻滚因子s在蝠鲼的迭代更新过程中不会发生变化,所以搜索过程中易陷入局部最优。
3、由于其固有的仿生算法易于陷入局部搜索的缺陷,使得其应用于复杂环境下机器人路径规划获得的路线的质量仍有较大提升空间。因此,新型或改进型智能优化算法将成为移动机器人路径规划求解的主流方法。
技术实现思路
1、本发明的目的在于提供一种移动机器人路径规划方法、装置、设备及存储介质,旨在解决现有技术中的上述问题。
2、本发明提供一种移动机器人路径规划方法,包括:
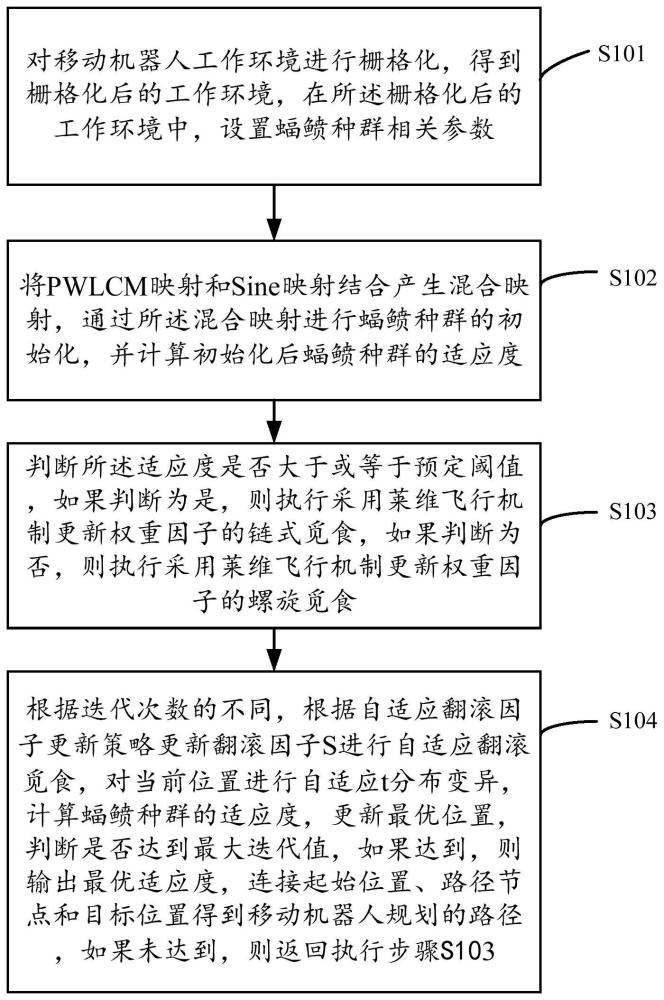
3、步骤1,对移动机器人工作环境进行栅格化,得到栅格化后的工作环境,在所述栅格化后的工作环境中,设置蝠鲼种群相关参数;
4、步骤2,将pwlcm映射和sine映射结合产生混合映射,通过所述混合映射进行蝠鲼种群的初始化,并计算初始化后蝠鲼种群的适应度;
5、步骤3,判断所述适应度是否大于或等于预定阈值,如果判断为是,则执行采用莱维飞行机制更新权重因子的链式觅食,如果判断为否,则执行采用莱维飞行机制更新权重因子的螺旋觅食;
6、步骤4,根据迭代次数的不同,根据自适应翻滚因子更新策略更新翻滚因子s进行自适应翻滚觅食,对当前位置进行自适应t分布变异,计算蝠鲼种群的适应度,更新最优位置,判断是否达到最大迭代值,如果达到,则输出最优适应度,连接起始位置、路径节点和目标位置得到移动机器人规划的路径,如果未达到,则返回执行步骤3。
7、本发明提供一种移动机器人路径规划装置,包括:
8、环境模块,用于对移动机器人工作环境进行栅格化,得到栅格化后的工作环境,在所述栅格化后的工作环境中,设置蝠鲼种群相关参数;
9、初始化模块,用于将pwlcm映射和sine映射结合产生混合映射,通过所述混合映射进行蝠鲼种群的初始化,并计算初始化后蝠鲼种群的适应度;
10、判断模块,用于判断所述适应度是否大于或等于预定阈值,如果判断为是,则执行采用莱维飞行机制更新权重因子的链式觅食,如果判断为否,则执行采用莱维飞行机制更新权重因子的螺旋觅食;
11、规划模块,用于根据迭代次数的不同,根据自适应翻滚因子更新策略更新翻滚因子s进行自适应翻滚觅食,对当前位置进行自适应t分布变异,计算蝠鲼种群的适应度,更新最优位置,判断是否达到最大迭代值,如果达到,则输出最优适应度,连接起始位置、路径节点和目标位置得到移动机器人规划的路径,如果未达到,则返回到判断模块。
12、本发明实施例还提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述移动机器人路径规划方法的步骤。
13、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现上述移动机器人路径规划方法的步骤。
14、采用本发明实施例,搜索能力更强,收敛速度更快。能够适应复杂的工作环境,快速实时规划出较短路径,缩短了时间成本,具有较好鲁棒性,适用于复杂环境的三维全覆盖路径规划。
技术特征:1.一种移动机器人路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,步骤1具体包括:
3.根据权利要求1所述的方法,其特征在于,将pwlcm映射和sine映射结合产生混合映射具体包括:
4.根据权利要求1所述的方法,其特征在于,所述步骤3具体包括:
5.根据权利要求1所述的方法,其特征在于,执行采用莱维飞行机制更新权重因子的螺旋觅食具体包括:
6.根据权利要求1所述的方法,其特征在于,根据自适应翻滚因子更新策略更新翻滚因子s进行自适应翻滚觅食具体包括:
7.根据权利要求1所述的方法,其特征在于,对当前位置进行自适应t分布变异具体包括:
8.一种移动机器人路径规划装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7中任一项所述的移动机器人路径规划方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有信息传递的实现程序,所述程序被处理器执行时实现如权利要求1至7中任一项所述的移动机器人路径规划方法的步骤。
技术总结本说明书实施例提供了一种移动机器人路径规划方法、装置、设备及存储介质,方法包括:对移动机器人工作环境进行栅格化,得到栅格化后的工作环境,设置蝠鲼种群相关参数;将PWLCM映射和Sine映射结合产生混合映射,进行蝠鲼种群的初始化,并计算适应度;判断适应度是否大于或等于预定阈值,如果是,则执行采用莱维飞行机制更新权重因子的链式觅食,如果为否,则执行采用莱维飞行机制更新权重因子的螺旋觅食;根据自适应翻滚因子更新策略更新翻滚因子S进行自适应翻滚觅食,对当前位置进行自适应t分布变异,计算蝠鲼种群的适应度,更新最优位置,判断是否达到最大迭代值,达到则输出最优适应度,得到移动机器人规划的路径。技术研发人员:邹涛,林海涛,吴泽峰,吴博淳,曾志伟,刘长红受保护的技术使用者:广州大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/258525.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表