干线公路平面交叉口与收费站联动控制优化方法及系统与流程
- 国知局
- 2024-08-05 11:40:01
本发明涉及交通管理领域,具体涉及一种干线公路平面交叉口与收费站联动控制优化方法及系统。
背景技术:
1、随着公路网不断加密,临近城区公路受道路用地条件限制,干线公路平面交叉口与收费站间距过近现象越来越频繁,且此类收费站交通需求一般较大,容易形成排队导致排队溢出。
2、目前,关于快速路出入口匝道与平面交叉口联动控制的较多,然而快速路出入口匝道与公路收费站交通运行存在明显区别,无法将上述联动控制策略直接用于收费站。而对于收费站与平面交叉口协同控制的现有技术中,比如,刘伟铭等提出了一种收费站与平面交叉口协同控制方法,但排队长度约束中并没有考虑车辆变道及展宽段、渐变段交通行为影响,综上,关于收费站与平面交叉口联动控制的相关研究中,存在无法有效控制收费站与平面交叉口交通稳定运行的问题。
3、因此,为解决以上问题,需要一种干线公路平面交叉口与收费站联动控制优化方法及系统,能够防止车辆排队溢出,保证收费站与平面交叉口交通的稳定运行,有效提升收费站与平面交叉口的通行效率。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供干线公路平面交叉口与收费站联动控制优化方法及系统,能够防止车辆排队溢出,保证收费站与平面交叉口交通的稳定运行,有效提升收费站与平面交叉口的通行效率。
2、本发明的干线公路平面交叉口与收费站联动控制优化方法,包括如下步骤:
3、以交叉口车辆延误最小为目标函数,构建联动控制优化模型;
4、调整联动控制优化模型中各参数值,使得联动控制优化模型取得最小值,将联动控制优化模型取得最小值时设置的各参数作为联动控制优化参数。
5、进一步,所述联动控制优化模型的目标函数为:
6、
7、其中,di,j为方向i转向j车均延误;qi,j为方向i转向j交通流量;i为交叉口路段方向,i∈i={1,2,3,4}分别为西、南、东和北;j为交叉口转向,j∈j={1,2,3}分别为左转、直行和右转;
8、
9、
10、
11、其中,xi,j为转向饱和度;λi,j为绿信比;c为周期时长;gi,j为方向i转向j绿灯时长;ni,j为方向i转向j行驶车道数;si,j为方向i转向j车道饱和流率;t为分析时长;e为校正系数;ci,j为方向i转向j的通行能力。
12、进一步,所述联动控制优化模型的约束条件包括相位相序约束、排队长度约束以及饱和度约束。
13、进一步,所述相位相序约束为:
14、
15、
16、
17、
18、
19、
20、
21、
22、
23、
24、
25、其中,gi为方向i绿灯时长;ti为方向i绿灯启亮时刻;ti,j为方向i转向j绿灯启亮时刻;δ为绿灯间隔时间;cmin为最小周期时长;cmax为最大周期时长;gmin为最小绿灯时长。
26、进一步,所述排队长度约束为:
27、
28、其中,βi,j为方向i转向j饱和车头间距;η为波动系数;lmax为收费站与平面交叉口间距过近区段所容许的最大排队长度。
29、进一步,根据如下公式确定最大排队长度lmax:
30、lmax=l1+l2+l3-l;
31、其中,l1为平面交叉口进口道展宽段长度;l2为平面交叉口进口道渐变段长度;l3为收费站出口与平面交叉口过渡段长度;l为车辆所需的最小变道长度;
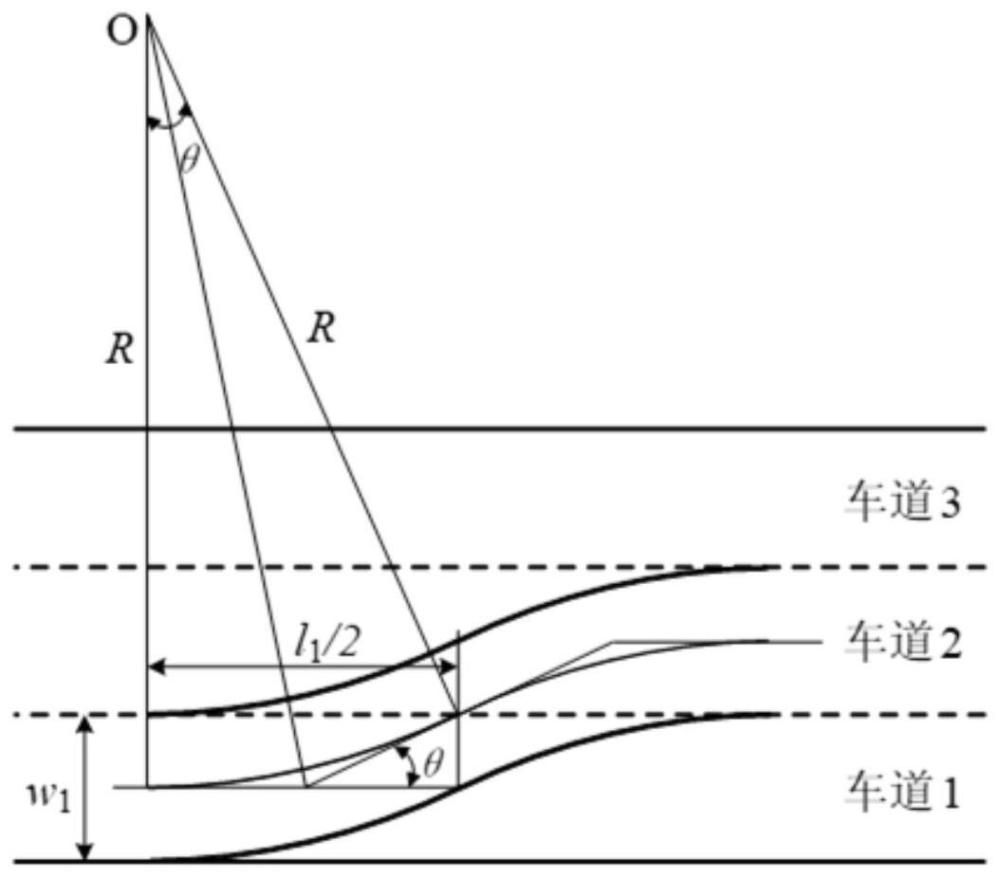
32、l=(n′-1)l1;
33、其中,n′为收费站出口与平面交叉口过渡段总车道数;l1为变换1条车道所需变道长度,r为变道过程中车辆行驶圆曲线半径,v为变道过程中车辆行驶速度,为横向摩阻系数,为横坡度;θ为圆曲线偏角,w1为车道宽度。
34、进一步,所述饱和度约束为:
35、
36、其中,ymax为转向饱和度最大值。
37、一种干线公路平面交叉口与收费站联动控制优化系统,包括模型构建单元以及联动控制单元;
38、所述模型构建单元,用于以交叉口车辆延误最小为目标函数,构建联动控制优化模型;
39、所述联动控制单元,用于调整联动控制优化模型中各参数值,使得联动控制优化模型取得最小值,将联动控制优化模型取得最小值时设置的各参数作为联动控制优化参数。
40、进一步,所述联动控制优化模型的目标函数为:
41、
42、其中,di,j为方向i转向j车均延误;qi,j为方向i转向j交通流量;i为交叉口路段方向,i∈i={1,2,3,4}分别为西、南、东和北;j为交叉口转向,j∈j={1,2,3}分别为左转、直行和右转;
43、
44、
45、
46、其中,xi,j为转向饱和度;λi,j为绿信比;c为周期时长;gi,j为方向i转向j绿灯时长;ni,j为方向i转向j行驶车道数;si,j为方向i转向j车道饱和流率;t为分析时长;e为校正系数;ci,j为方向i转向j的通行能力。
47、进一步,所述联动控制优化模型的约束条件包括相位相序约束、排队长度约束以及饱和度约束。
48、本发明的有益效果是:本发明公开的一种干线公路平面交叉口与收费站联动控制优化方法及系统,通过分析收费站与平面交叉口交通运行强耦合关系,将衔接方向排队长度考虑到平面交叉口信号配时中,结合车辆变道行为给出了衔接区段可允许的最大排队长度,建立了一个统一的非线性规划联动控制优化模型,有效解决了收费站与平面交叉口间距过近而导致交通运行不稳定的问题,防止了车辆排队溢出,提升了收费站与平面交叉口的通行效率。
技术特征:1.一种干线公路平面交叉口与收费站联动控制优化方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:所述联动控制优化模型的目标函数为:
3.根据权利要求1所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:所述联动控制优化模型的约束条件包括相位相序约束、排队长度约束以及饱和度约束。
4.根据权利要求3所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:所述相位相序约束为:
5.根据权利要求3所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:所述排队长度约束为:
6.根据权利要求5所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:根据如下公式确定最大排队长度lmax:
7.根据权利要求3所述的干线公路平面交叉口与收费站联动控制优化方法,其特征在于:所述饱和度约束为:
8.一种干线公路平面交叉口与收费站联动控制优化系统,其特征在于:包括模型构建单元以及联动控制单元;
9.根据权利要求1所述的干线公路平面交叉口与收费站联动控制优化系统,其特征在于:所述联动控制优化模型的目标函数为:
10.根据权利要求1所述的干线公路平面交叉口与收费站联动控制优化系统,其特征在于:所述联动控制优化模型的约束条件包括相位相序约束、排队长度约束以及饱和度约束。
技术总结本发明公开了一种干线公路平面交叉口与收费站联动控制优化方法及系统,包括:以交叉口车辆延误最小为目标函数,构建联动控制优化模型;调整联动控制优化模型中各参数值,使得联动控制优化模型取得最小值,将联动控制优化模型取得最小值时设置的各参数作为联动控制优化参数。本发明能够防止车辆排队溢出,保证收费站与平面交叉口交通的稳定运行,有效提升收费站与平面交叉口的通行效率。技术研发人员:雷青,骆中斌,吴玉荣,宋浪,马璐,毕研秋,俞山川,张亚,陈珍,黄伟,李远哲,代忠,刘馥齐受保护的技术使用者:贵州省铜仁公路管理局技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/258701.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。