一种具有感知功能的微纳机器人及其制备方法
- 国知局
- 2024-08-05 12:01:40
本发明涉及微纳机器人的制备,具体涉及一种具有感知功能的微纳机器人及其制备方法。
背景技术:
1、近年来,人工合成的微纳机器人在环境、生物医学和微工程等领域显示出极大的潜力。微纳机器人,也称微纳马达是一种介于纳米与微米尺度的动力装置,它能将外部环境中的超声能、光能、电能、磁能、热能、化学能等能量转化成机械能,从而实现个体的特定运动。相比于其他具有传感功能的功能器件,微纳机器人能够在狭小微纳空间内运动,且能够度所处的环境状态进行感知。然而现有微纳机器人的感知功能主要应用于生物医疗领域,在温度感知方向大多数微纳机器人采用有机物进行修饰设计,其感知范围小,感知温度低,不利于微工程领域的应用,鉴于此提供用于微工程领域内的一种具有感知功能的微纳机器人具有非常重要的意义。
技术实现思路
1、为了解决上述技术问题,本发明的目的是提供一种具有感知功能的微纳机器人及其制备方法,以解决现有微纳机器人的感知应用范围小,感知温度较低的问题。
2、本发明解决其技术问题所采用的技术方案是:
3、一种具有感知功能的微纳机器人的制备方法,包括以下步骤:
4、步骤一:将五水硫酸铜颗粒加入树脂当中,搅拌后加入硅烷偶联剂,搅拌均匀,得到微纳机器人制备的内相溶液;
5、步骤二:将聚乙烯吡咯烷酮与十二烷基硫酸钠加入去离子水中,搅拌均匀,得到微纳机器人制备的外相溶液;
6、步骤三:利用微流道液滴成型技术,利用步骤一、步骤二获得的溶液分别作为内外相,调整内外相的流速,控制液滴成型后的尺寸,利用紫外线灯进行固化得到具有核壳结构的微纳机器人基底微球;
7、步骤四:将步骤三得到的微纳机器人基底微球放入磁控溅射仪器当中,真空状态下镀镍,得到具有感知功能的微纳机器人。
8、所述步骤一中,五水硫酸铜颗粒用球磨机研磨12个小时至微粒尺寸在2um。
9、所述步骤一中,树脂为耐高温透明色光固化树脂,其耐高温为250℃。
10、所述步骤一中,硅烷偶联剂为kh550,硅烷偶联剂为无色液体。
11、所述步骤一中,五水硫酸铜颗粒、树脂、硅烷偶联剂的质量比为0.5:1:0.1。
12、所述步骤一中,涉及树脂的过程均在室温和无光黑暗条件下进行。
13、所述步骤二中,聚乙烯吡咯烷酮、十二烷基硫酸钠、去离子水的质量比为0.01:0.02:0.47。
14、所述步骤三中,控制内外相的流速使得具有核壳结构的微纳机器人基底微球大小在80um。
15、所述步骤四中,控制磁控溅射镀镍的厚度在200nm。
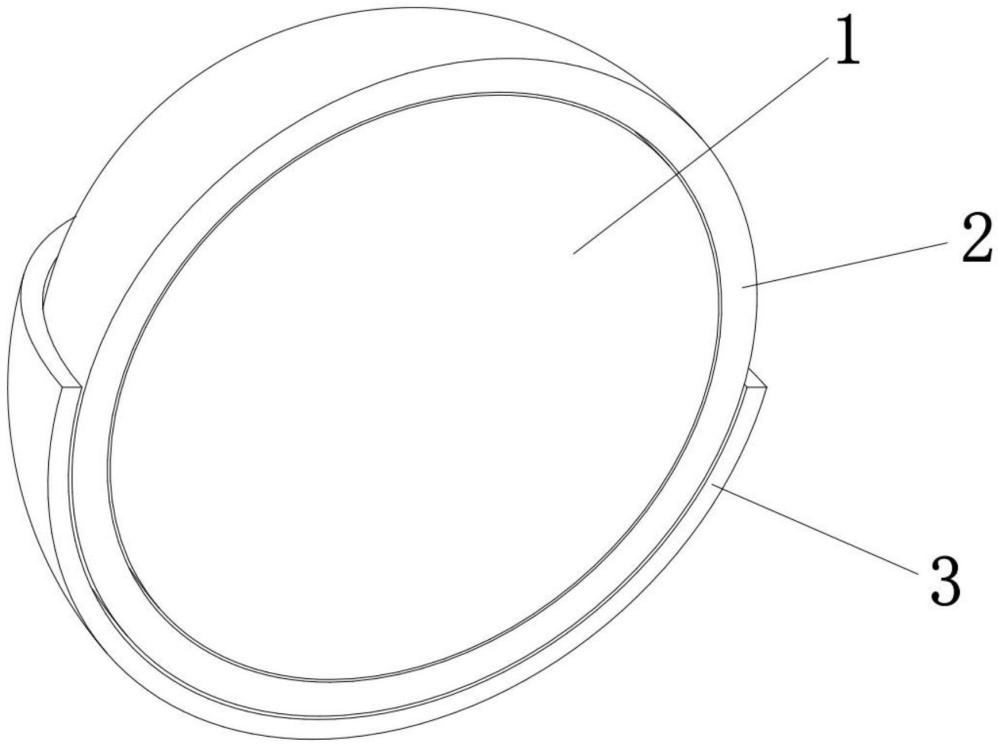
16、一种具有感知功能的微纳机器人的制备方法,所制备的具有感知功能的微纳机器人,所述具有感知功能的微纳机器人包括五水硫酸铜颗粒与硅烷偶联剂混合部分、树脂和镍层,五水硫酸铜颗粒与硅烷偶联剂混合部分的外侧设置有树脂,树脂的外侧设置有镍层。
17、本发明具有以下有益效果:
18、1.本发明利用微流道技术内外相溶液互不相溶的原理,通过控制内外相的流速制备微纳机器人的基底微球,具有较为均一的尺寸。此基底微球在紫外光照射下固化形成,方便快捷。
19、2.本发明利用五水硫酸铜与硅烷偶联剂发生反应后得到以碱式硫酸铜为主体的复杂成分,利用随着温度升高所呈现颜色不同的原理,在100℃-250℃之间温度感知。本发明的微纳机器人具有磁驱和感知的特点,可以在大范围、高温度的环境下对微孔隙、微结构区域内进行感知温度。
20、3.本发明所得的微纳机器人在感知温度过后是不可逆的,五水硫酸铜与硅烷偶联剂发生化学反应生成以碱式硫酸铜为主体的复杂成分,这一化学反应是不可逆的,以便感知后进行回收检测,并且在一定程度上不失真,确保感知到最真实的环境温度。
技术特征:1.一种具有感知功能的微纳机器人的制备方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤一中,五水硫酸铜颗粒用球磨机研磨12个小时至微粒尺寸在2um。
3.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤一中,树脂为耐高温透明色光固化树脂,其耐高温为250℃。
4.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤一中,硅烷偶联剂为kh550,硅烷偶联剂为无色液体。
5.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤一中,五水硫酸铜颗粒、树脂、硅烷偶联剂的质量比为0.5:1:0.1。
6.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤一中,涉及树脂的过程均在室温和无光黑暗条件下进行。
7.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤二中,聚乙烯吡咯烷酮、十二烷基硫酸钠、去离子水的质量比为0.01:0.02:0.47。
8.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤三中,控制内外相的流速使得具有核壳结构的微纳机器人基底微球大小在80um。
9.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,其特征在于:所述步骤四中,控制磁控溅射镀镍的厚度在200nm。
10.根据权利要求1所述的一种具有感知功能的微纳机器人的制备方法,所制备的具有感知功能的微纳机器人,其特征在于:所述具有感知功能的微纳机器人包括五水硫酸铜颗粒与硅烷偶联剂混合部分(1)、树脂(2)和镍层(3),五水硫酸铜颗粒与硅烷偶联剂混合部分(1)的外侧设置有树脂(2),树脂(2)的外侧设置有镍层(3)。
技术总结本发明涉及微纳机器人的制备技术领域,具体涉及一种具有感知功能的微纳机器人及其制备方法。制备方法包括:步骤一:将五水硫酸铜颗粒加入树脂当中,搅拌后加入硅烷偶联剂,搅拌均匀,得到微纳机器人制备的内相溶液;步骤二:将聚乙烯吡咯烷酮与十二烷基硫酸钠加入去离子水中,搅拌均匀,得到微纳机器人制备的外相溶液;步骤三:利用微流道液滴成型技术,利用步骤一、步骤二获得的溶液分别作为内外相,调整内外相的流速,控制液滴成型后的尺寸,利用紫外线灯进行固化得到具有核壳结构的微纳机器人基底微球;步骤四:将步骤三得到的微纳机器人基底微球放入磁控溅射仪器当中,真空状态下镀镍,得到具有感知功能的微纳机器人。技术研发人员:李隆球,丁绍博,常晓丛,刘军民,周德开受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260686.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表