一种混合网联环境下应急车辆时空路权协同优先控制方法
- 国知局
- 2024-08-05 12:17:08
本发明涉及一种混合网联环境应急车辆时空路权协同优先控制方法技术,属于智能交通。
背景技术:
1、已有研究(cn202311186522.0)提供了一种网联环境下城市道路应急车辆优先控制方法,包括建立每条轨迹上车辆进出网格时间与进入交叉口速度-时间的函数关系、提出车辆速度分级方法,通过规划车辆在交叉口和路段的行驶轨迹,实现应急车辆优先通行。
2、还有研究(cn201610804554.6)提供了一种基于两阶段优化过程的交叉口应急车辆信号优先控制方法,包括应急车辆检测、不同进口方向各车道排队车辆信息计算、应急车辆行程时间及排队车辆消散时间计算、绿信设计。根据当前交叉口的信号状态对应急车辆提供信号优先权,提前或延迟绿灯时间,同时减低其它车辆的延误时间。
3、此外,还有研究(cn202011069431.5)提供了一种基于应急车道的交叉口优先控制方法,包括分类排队状态,确定应急车道开启时刻、计算车道内部车辆清空所需绿灯时间、建立应急车道开启时刻以及信号优先开启时刻的组合优化模型,从而形成最优开启方案,提高应急救援效率。
4、目前对应急救援优先控制方案研究已有一定基础,但仍存在以下缺陷:
5、其一,现有大部分研究主要基于完全网联的理想实验环境,没有考虑非完全网联状态,即混合环境。在该环境下,需要考虑非网联车辆交通状态信息的获取或估计问题。智能交通系统发展至完全网联状态必然经过一段较长时间的混合交通流时期,而目前,针对这一时期中的应急救援控制问题设计的合理方案较少
6、其二,现有应急救援方法多数基于历史数据和固定参数进行建模,无法动态调整以适应不同场景。这使得调度系统无法根据实际交通状态进行动态微调,限制了系统在复杂和变化的环境中的适应性,从而降低应急救援效率。目前能够做到应急救援方案动态协同的方案较少。
技术实现思路
1、针对现有应急救援优先控制方案研究中存在的主要缺陷,设计一种创新的、具有实际应用价值的应急救援优先调控方法。具体而言,本发明的目标主要包括:
2、其一,充分考虑未来不同网联渗透率,提供一种稳定的、适用于混合环境的应急救援优先控制方案,充分考虑非网联车辆交通状态信息的获取或估计问题。
3、其二,引入具有自适应性和实时性的模型预测控制(mpc)方法,使应急救援方案能够根据现实交通状态动态循环渐进微调,提高系统的动态协同性,提高应急救援效率。
4、技术方案:本发明完整的技术手段和方法。
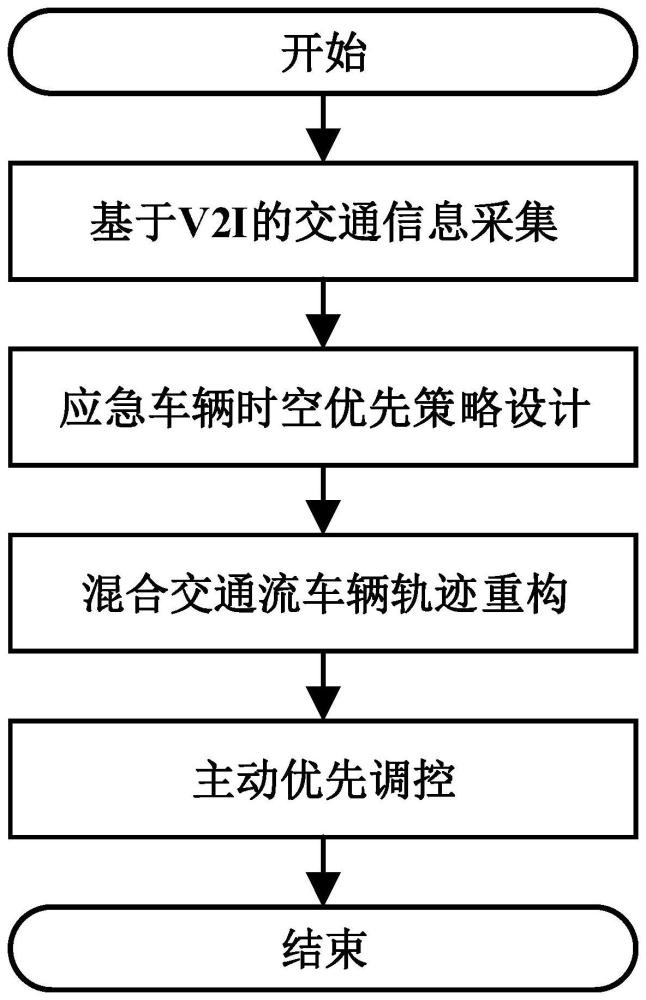
5、步骤一:基于v2i技术获取应急车辆(ev)进入路段开始各车道的网联社会车辆(cv)交通状态信息,包括网联社会车辆位置矩阵xcv、网联社会车辆速度矩阵vcv、信号相位φ,应急车辆位置xev、速度vev。获取过程的示意图如图2。
6、步骤二:选择应急车辆时空路权协同优先策略。结合步骤一获取的信号相位φ,同时考虑应急救援效率和社会车辆延误,根据红灯早断和绿灯延长的执行条件,执行时间路权优先控制策略;根据步骤一获取的社会车辆与应急车辆状态信息,执行空间路权优先控制策略。
7、2.1、时间路权优先控制策略
8、2.1.1、红灯早断方案判定条件
9、当满足以下四个条件时,执行红灯早断方案:
10、条件1:应急救援车辆预计到达交叉口停止线时φ为红灯相位;
11、条件2:所有无应急救援相位的绿灯时长均大于交叉口b的最小绿灯时间(gminjb);
12、条件3:可压缩的红灯时长大于0;
13、条件4:一般交通性能指标pib的取值大于0。
14、具体红灯早断方案设计及指标计算方法如下:
15、应急车辆抵达交叉口停止线但信号灯仍未从红灯相位切换至绿灯相位时,可以考虑采用红灯早断控制方案,使应急车辆能够直接通过交叉口。采用红灯早断方案应满足的前提条件如下:
16、g0<δrb<ri+1-ri+1min
17、其中,g0代表应急车辆从进入路段到通过交叉口所需要的时间,δrb代表当前相位i需要缩短的红灯时长,ri+1代表第i+1相位的红灯时长,ri+1min代表第i+1相位的最短红灯时长。红灯早断方案的示意图如图3所示。
18、根据《公路通行能力手册》,λjb,cb和sijb具有以下关系:
19、
20、
21、其中,λjb代表交叉口b在第j相位的绿信比,cb代表交叉口b的信号周期,sijb代表交叉口b在第j相位对应的第i车道的饱和流量(veh/h),λminjb代表交叉口b第j相位的最小绿信比,vijb代表交叉口b在第j相位对应的第i车道的实际流量(veh/h),gminjb代表交叉口b第j相位的最短绿灯时长。则红灯早断时长δrb的计算公式如下:
22、δrb=db=cb-tlb-cbλminjb+tsti
23、tsti代表应急救援车辆的安全反应时间间隔,db代表交叉口b为了应急车辆优先通过而压缩的时间,tlb为启动损失时间。设交叉口b的车道总数为n,交叉口b第j相位对应的第i车道因红灯早断而减少的社会车辆延误dijb,以及经过加权求和所得的缩短后的延误时间的计算公式如下:
24、
25、
26、权重ω由应急救援的紧急程度决定。rphb代表红灯早断方案下交叉口b无应急车辆通行相位ph的红灯时长。之后,计算交叉口b在无信号优先时第z相位对应的第i车道上的社会车辆延误以及交叉口b的总社会车辆延误设交叉口b无应急信号优先的相位数为m,则计算公式如下:
27、
28、
29、sizb代表交叉口b在第z相位对应的第i车道的饱和流量(veh/h),vizb代表交叉口b在第z相位对应的第i车道的实际流量(veh/h),rpab代表红灯早断方案下,交叉口b与应急救援相位pa相对方向的红灯时长。红灯早断方案下交叉口b一般交通性能指标pib:
30、
31、2.1.2、绿灯延长方案判定条件
32、当满足以下三个条件时,执行绿灯延长方案:
33、条件1:应急救援车辆预计到达交叉口停止线时为红灯相位;
34、条件2:采用绿灯延长方案后,各相位的饱和流率小于0.98;
35、条件3:pib的取值大于0。
36、具体绿灯延长方案设计及指标计算方法如下:
37、当应急车辆进入路段时为绿灯,但抵达交叉口停止线时信号灯已由绿灯切换成红灯相位时(即剩余绿灯时间不足以让应急车辆通过停止线),此时可以采用绿灯延长方案。采取绿灯延长方案应满足的前提条件如下:
38、g0<δgb<gi+1-gi+1min
39、其中,g0代表应急车辆从进入路段到通过交叉口所需要的时间,δgb代表当前相位i需要延长的绿灯时长,gi+1代表第i+1相位的绿灯时长,gi+1min代表第i+1相位的最短绿灯时长。绿灯延长方案的示意图如图4所示:
40、绿灯延长时间的计算公式如下:
41、
42、因此,绿灯延长方案下应急车辆减少的延迟时间db等于应急车辆在不采取信号优先方案时的排队时间,可表示为:
43、db=δgb+rphb+tlb
44、则交叉口b第j相位第i车道在绿灯延长方案下降低的延误时间dijb以及经过加权求和得到的绿灯延长方案下的延误时间的计算公式如下:
45、
46、
47、同理,计算绿灯延长方案下交叉口b在无信号优先时第z相位对应的第i车道上的社会车辆延误以及交叉口b的总社会车辆延误计算公式如下:
48、
49、
50、之后,基于以上公式即可计算在绿灯延长方案下交叉口b一般交通性能指标pib:
51、
52、2.2、空间路权优先控制
53、本发明提出了一种基于应急救援专用车道以及动态车道清空的空间路权优先方案,如图5所示。空间路权优先方案的算法核心流程如下:
54、
55、具体而言,空间路权优先方案可以细分为优先车道选择、车道预清空与空间路权复原三个关键步骤:
56、2.2.1、应急救援优先车道选择方案
57、定义应急车辆所处车道为应急救援优先车道(ev_lane)。通过v2x技术通知在应急车辆前方的社会车辆禁止进入优先车道。本发明以车道空间平均速度最小的车道j作为应急救援优先车道(ev_lane),计算公式如下:
58、mindj(a*)=min{d1(a*),d2(a*),...,dn(a*)}
59、2.2.2、车道预清空方案
60、定义应急车辆前方的部分区域为动态清空区域(ev_zone),通过v2v通信技术向该区域内行驶的社会车辆发送信息,要求其在满足安全换道条件的条件下主动为应急车辆让行。
61、以道路的起点为坐标原点,laneveh代表社会车辆所在的车道,xev和xveh分别代表应急车辆和社会车辆在相对坐标系下的空间位置。设ev_zone空间范围长度范围为sc,当满足以下条件时,社会车辆会主动为应急车辆让行:
62、laneveh==ev_lane,xveh-xev<sc,gaptar>mingap
63、其中,gaptar为目标车道安全距离,mingap为车辆安全换道条件。当社会车辆与应急车辆满足以下相对位置关系时,应急车辆通过v2x技术向社会车辆发布应急救援消息,此时处在ev_lane以外车道上的社会车辆需要谨慎驾驶,并且不允许进入ev_lane。
64、lane_list[id]!=ev_lane,pos_list[id]-xev>0
65、2.2.3、空间路权恢复方案
66、当社会车辆与应急车辆满足以下相对位置关系时,此时社会车辆的行驶状态恢复正常,这些社会车辆可以自由进出ev_lane:
67、xev-xveh>0
68、步骤三:基于步骤一获取的cv的位置、位置等信息,对步骤二确定的应急优先车道(ev_lane)上的混合交通流(cv,hv,ev)进行车辆轨迹重构,流程如图6所示,具体步骤如下:
69、3.1、初步估计cv轨迹间可能存在的hv的位置与速度。本发明假设时空域(图6中两条轨迹间灰色部分)上下边界的两条已知cv轨迹中提取的可能hv估计速度在时空域内均匀分布,此时存在nhv条待重构hv轨迹,cv轨迹间可能hv位置与速度估计公式如下:
70、
71、
72、则最靠近前导cv的hv(i=1时)估计位置与速度为:
73、
74、
75、其中,xn,i,vn,i分别表示在第n-1和第n条cv轨迹间第i辆可能存在的hv位置和速度,xn-1,vn-1,xn,vn分别表示第n-1和第n条cv的已知位置和速度。nhv即为第n-1和第n条cv轨迹间可能的hv数量。
76、3.2、重构人工驾驶车辆轨迹。
77、3.2.1、确定cv轨迹间hv轨迹条数nhv。一方面,将上述第一辆hv的位置和速度代入idm模型中,计算第n-1和第n条cv轨迹之间,靠近第n-1辆cv的第一辆hv的加速度idm的表达式如下:
78、
79、其中,ap(t)为t时刻车辆p的加速度,vf为期望速度,am为最大加速度,t为安全车头时距,b为舒适减速度的绝对值,s0为最小停车间距,vp(t)为t时刻车辆p的速度,xp(t)为t时刻车辆p的位置,δ为加速度指数。
80、另一方面,根据步骤2.1中估计的对应第i辆hv速度,再次计算各时间步长划分点处hv的估计加速度,表达式如下:
81、
82、至此,在有限车辆约束下,选用绝对误差作为判断标准,则t时刻误差最小时的最佳hv轨迹条数如下:
83、
84、在每个重构区域,即每对cv轨迹间的时空区域内,可能存在的hv车辆轨迹条数是有限的,如下式所示:
85、
86、其中,[·]代表取整函数,ti代表时刻i。
87、在排除不符合上述约束条件的nhv后,对各时刻最佳车辆轨迹条数nhv(t)取众数,得到两条cv轨迹间的最佳车辆数:
88、nhv=mode(nhv(ti),i=1,2,...)
89、3.2.2、计算每个时刻每辆hv的位置,即hv的轨迹。当nhv确定后,代入步骤2.1的公式中,可对hv的估计速度进行更新,并作为idm的输入之一,重新估计出各时刻hv的车间距δx。
90、在任意时刻,hv都需要与前后车保持安全间距,即满足以下约束条件:
91、
92、其中,l表示平均车长。根据以上计算公式可知当前时刻hv加速度的估计量并可利用idm计算nhv辆hv的加速度与hv实际的加速度误差计算公式为:
93、
94、则此问题即可转化求解有约束的非线性规划问题,最终形成的车辆轨迹为:
95、xn,i=xn,i-1-δxn,i,i=0,1,...,nhv,n
96、其中,xn,i即为在第n-1和第n辆cv间的第i辆可能hv的时空轨迹。
97、步骤四:主动优先控制。采用基于模型预测控制(mpc)框架设计的主动优先调控算法预测应急车辆在ev_lane上的行程时间,调节当前车道对应的信号(信号优先),并对该车道上的全部车辆发布建议速度(速度引导)。算法的具体流程如图7所示。
98、4.1、行程时间预测。本发明利用mpc预测模块,根据ev_lane上应急车辆前方车辆的运动轨迹,估计各社会车辆到达停止线时的行驶时间ti,进而推算应急车辆可能的行程时间ttev。考虑到ev_lane上距离交叉口最近车辆(头车)的运动状态因不同信号相位(红灯、绿灯)的影响可能存在多种可能的情况(不停车直接通过、减速至停车、停车启动)。上述车辆运动状态随信号灯的变化可归纳为以下三种情况:
99、情况1:不停车直接通过
100、如果ev_lane上车队的头车在当前信号相位下能够不停车通过交叉口,此时ev_lane上的头车可视为以自由流状态行驶,可利用退化的idm描述该车辆的运动状态。车辆加速度的计算公式如下:
101、
102、情况2:减速至停车
103、对于需要经排队减速至停车的头车,受信号灯影响需主动减速并停在停车线前。该车辆的行驶过程包含减速停车、排队等待、绿灯启动三个阶段。在减速停车阶段,头车等同于跟随静止在交叉口停止线上的虚拟车,车辆驾驶行为服从idm,直至在停车线前安全停下。
104、情况3:绿灯启亮
105、此时,排在ev_lane停车线前的第一辆社会车辆主动加速起步,后续车辆跟随前车逐渐启动。在这个阶段,由于起步的头车基本不受其他车辆的影响,可视为从静止开始运动的自由行驶状态。
106、4.2、根据行程时间预测结果ttev,利用mpc控制模块调节当前车道对应的信号(信号优先),并对该车道上的全部车辆发布建议速度(速度引导)。
107、首先,利用车辆动力学方程刻画应急救援车辆的运行状态。车辆动力学方程如下所示:
108、vt+1=vt+at×b
109、
110、其中b表示采样时间间隔(即预测步长),xt表示t时刻的车辆位置,xt+1表示t+1时刻的车辆位置,at表示t时刻的车辆加速度,vt表示t时刻的车辆速度;则应急车辆在t时刻的运行状态空间方程表示为:
111、
112、其中,应急车辆的加速度at为控制变量,位置xt速度vt分别为状态变量。考虑到应急救援的首要任务是保证应急救援效率,因此在保证车辆安全性的前提下,应急救援车辆运行状态的优化方程为:
113、
114、
115、其中t0表示车辆运行状态预测的初始时刻,应急车辆的初速度接近自由流速度vfreeamin和amax分别为应急救援车辆的最大减速度和最大加速度,tsti为急救援车辆的安全反应时间间隔。将一个预测时域内所有控制时刻的状态变量[xt vt]t与控制变量at合并构建变量y′,其具体形式如下:
116、
117、其中c代表预测次数,其具体计算公式如下:
118、
119、pk为预测时域,q为控制时域,为向上取整符号,δt为代表应急车辆的最大控制时域,pn代表应急救援车辆通过交叉口停止线前的最后一次预测时域。尽管ev具备了v2v与v2i通信功能,但其本质上依然属于人工驾驶车辆,并未达到自动驾驶级别。考虑到人工驾驶的精细度有限,控制时域不应过小,本文的控制时域设为5s。结合变量y′与应急车辆运行状态的空间状态方程,可将上式转换为如下所示的二次规划型函数:
120、
121、
122、矩阵h′的值为:
123、
124、
125、h′∈r(2c+2)×(2c+2)
126、y′min的值为:
127、y′min=[0,…,pr+1,0,amin,…,amin]t,y′min∈r1×(3c+2)
128、y′max的值为:
129、y′max=[yy′,amax,...,amax]t,y′max∈r1×(3c+2)
130、yy′=[+∞,vfree,...,+∞,vfree]t,yy′∈r1×(2c+2)
131、矩阵aeq′的值为:
132、aeq′=[a′c′],aeq′∈r2c×(3c+2)
133、
134、
135、矩阵beq′的值为:
136、beq′=[0,0,…,0],beq′∈r1×2c
137、使用有效集法(asm)对该二次规划函数进行求解,即可求得一个预测时域内所有控制时刻的状态变量[xt vt]t与控制变量at,之后,基于状态变量[xt vt]t确定相应的信号优先时长以及相位恢复时机,并利用控制变量at确定应急车辆在的建议速度vadv,实现应急车辆的交叉口速度引导:
138、vadv=at×q
139、有益效果:
140、1.构建了一种混合网联环境下应急车辆时空路权协同优先控制方法,以提高混合网联环境下应急车辆的救援效率,同时避免对社会车辆造成较大延误。
141、2.提出了一种基于混合网联精细化cv轨迹数据(如速度、加速度、位置)的轨迹重构方法,用于估计应急优先车道的交通状态。
142、3.提出了基于红灯早断、绿灯延长等方法的时间路权优先策略以及基于最优车道、动态清空距离等方法的空间路权优先策略。
143、4.基于模型预测控制(mpc)框架设计了一种主动优先控制算法,通过车道引导、速度引导、信号优先控制等方式保障应急车辆的优先通行权,且相比于被动优先方法在降低社会车辆延误方法更具优越性。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261955.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表