一种双电机线控转向系统转向角冗余控制方法及系统
- 国知局
- 2024-08-08 16:53:03
本技术涉及汽车线控转向控制领域,尤其涉及一种双电机线控转向系统转向角冗余控制方法及系统。
背景技术:
1、近年来,随着汽车智能化和电动化技术的提高,自动驾驶汽车成为行业热点。其中,线控转向系统在自动驾驶汽车的路径跟踪和紧急避障中发挥了关键作用,其性能直接影响主动安全和驾乘体验。与传统的转向系统相比,线控转向系统取消了方向盘到转向执行机构之间的机械连接,完全由电信号实现车辆控制,有利于底盘域功能的集成。然而机械备份的取消使得机电系统的失效概率增加,对线控转向系统的功能安全提出了更高的要求。
2、作为转向系统的动力来源,转向电机的工作性能至关重要。一旦转向电机发生失效,将会对车辆操控性和行车安全性造成严重威胁,因此,为了提高系统的可靠性和安全性,保障功能安全,并考虑到系统结构、成本的限制,往往采用双电机冗余的线控转向系统。
3、目前现有技术提供的双电机线控转向系统容错控制方法更关注车辆上层的稳定性控制,而较少涉及底层执行器层的转向角控制。此外,双电机线控转向系统当中存在固有的参数不确定性,比如系统转动惯量、阻尼等参数的不确定性,导致控制的精度较低。因此,为了实现在转向电机失效下精确的转向角控制,亟需一种鲁棒性强、控制精度高的双电机线控转向系统转向角冗余控制方案。
技术实现思路
1、本技术提供一种双电机线控转向系统转向角冗余控制方法及系统,以至少解决在转向电机失效下车辆转向角控制精确低的技术问题。
2、本技术第一方面实施例提出一种双电机线控转向系统转向角冗余控制方法,所述方法包括:
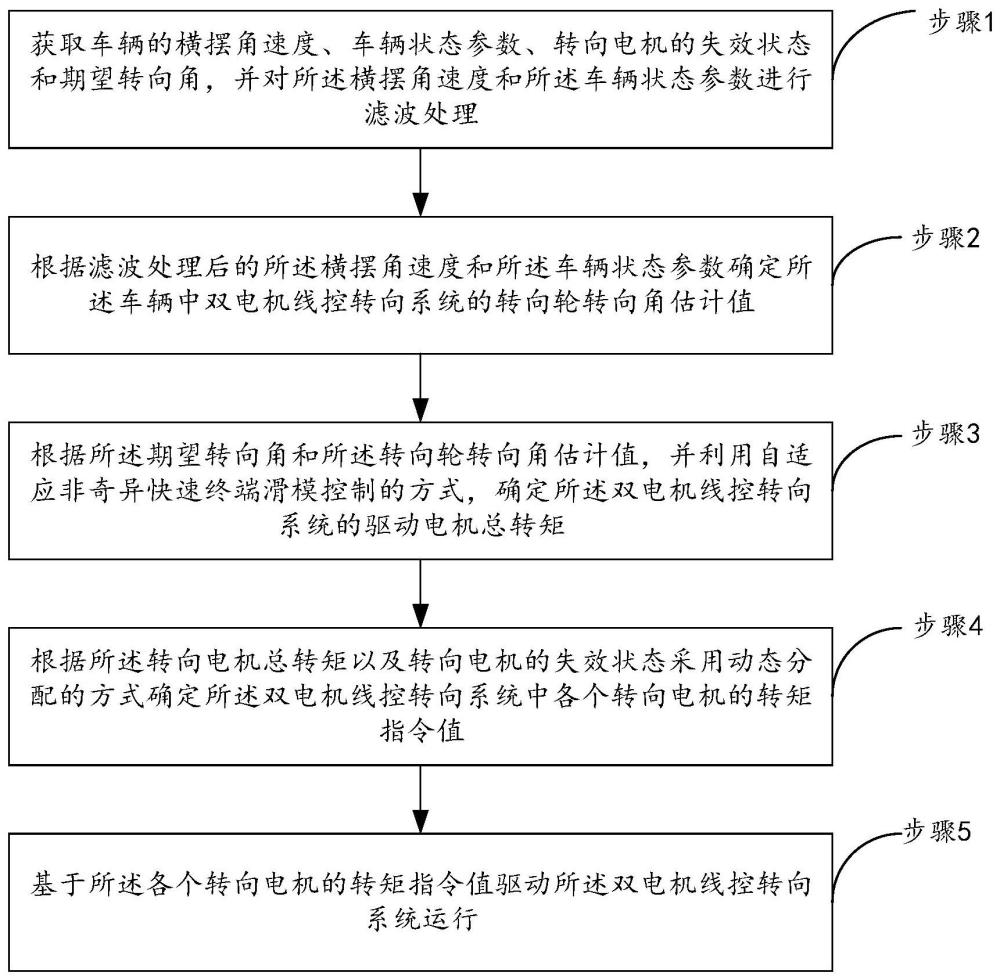
3、获取车辆的横摆角速度、车辆状态参数、转向电机的失效状态和期望转向角,并对所述横摆角速度和所述车辆状态参数进行滤波处理;
4、根据滤波处理后的所述横摆角速度和所述车辆状态参数确定所述车辆中双电机线控转向系统的转向轮转向角估计值;
5、根据所述期望转向角和所述转向轮转向角估计值,并利用自适应非奇异快速终端滑模控制的方式,确定所述双电机线控转向系统的转向电机总转矩;
6、根据所述转向电机总转矩采用动态分配的方式确定所述双电机线控转向系统中各个转向电机的转矩指令值;
7、基于所述各个转向电机的转矩指令值驱动所述双电机线控转向系统运行。
8、优选的,所述车辆状态参数包括:
9、当前时刻车辆质心侧偏角、车辆质量、车辆质心到前轴的距离、车辆质心距后轴的距离、车辆纵向速度、前及后轮胎的侧偏刚度、车辆绕z轴的转动惯量。
10、进一步的,所述根据滤波处理后的所述横摆角速度和所述车辆状态参数确定所述车辆中双电机线控转向系统的转向轮转向角估计值,包括:
11、根据滤波处理后的所述车辆状态参数构建二自由度车辆模型;
12、根据滤波处理后的车辆的横摆角速度构建未知输入观测器;
13、根据所述二自由度车辆模型、未知输入观测器确定所述车辆中双电机线控转向系统的转向轮转向角估计值。
14、进一步的,所述车辆中双电机线控转向系统的转向轮转向角估计值的计算式如下:
15、
16、式中,为转向轮转向角估计值,b+为第二矩阵b的伪逆矩阵,为基于二自由度车辆模型与未知输入观测器得到的观测状态量的一阶导数,为系统输出的车辆的横摆角速度的一阶导数,a为第一矩阵,为状态量的估计值,其中,c=[0 1],cf为前轮胎的侧偏刚度,cr为后轮胎的侧偏刚度,m为车辆质量,vx为车辆纵向速度,lf为车辆质心到前轴的距离,lr为车辆质心距后轴的距离,iz为车辆绕z轴的转动惯量,x为状态量,其中,所述状态量包括质心侧偏角和横摆角速度,e=-b(cb)t[cb(cb)t]-1,e为第三矩阵。
17、进一步的,所述根据所述期望转向角和所述转向轮转向角估计值,并利用自适应非奇异快速终端滑模控制的方式,确定所述双电机线控转向系统的驱动电机总转矩,包括:
18、根据所述期望转向角和所述转向轮转向角估计值确定所述转向轮的转向角控制误差及所述误差的一阶微分;
19、根据所述转向轮的转向角控制误差及所述误差的一阶微分构造非奇异终端滑模面;基于所述非奇异终端滑模面构建李亚普霍夫函数,并基于所述李亚普霍夫函数得到参数自适应率;
20、根据所述参数自适应率确定所述双电机线控转向系统的转向电机总转矩。进一步的,所述参数自适应率的计算式如下:
21、
22、式中,为系统不确定部分估计值的一阶导数,γ>0,γ为控制器参数,s为滑模面,jeq为系统等效转动惯量,为映射函数,为系统不确定部分估计值,δmax为系统不确定部分的最大值,δmin为系统不确定部分的最小值。
23、进一步的,所述根据所述转向电机总转矩和所述转向电机的失效状态采用动态分配的方式确定所述双电机线控转向系统中各个转向电机的转矩指令值,包括:
24、利用公式tm1=0.5ftm,确定所述双电机线控转向系统中第一个转向电机的转矩指令值,利用公式tm2=0.5(2-f)tm,确定所述双电机线控转向系统中第二个转向电机的转矩指令值;
25、其中,tm1为双电机线控转向系统中第一个转向电机的转矩指令值,tm2为双电机线控转向系统中第二个转向电机的转矩指令值,tm为转向电机总转矩,f为转向电机的失效状态,f=1表示转向电机未失效,f=0表示转向电机失效。
26、本技术第二方面实施例提出一种双电机线控转向系统转向角冗余控制系统,包括:获取模块,用于获取车辆的横摆角速度、车辆状态参数、转向电机的失效状态和期望转向角,并对所述横摆角速度和所述车辆状态参数进行滤波处理;
27、第一确定模块,用于根据滤波处理后的所述横摆角速度和所述车辆状态参数确定所述车辆中双电机线控转向系统的转向轮转向角估计值;
28、第二确定模块,用于根据所述期望转向角和所述转向轮转向角估计值,并利用自适应非奇异快速终端滑模控制的方式,确定所述双电机线控转向系统的转向电机总转矩;
29、第三确定模块,用于根据所述转向电机总转矩和所述转向电机的失效状态采用动态分配的方式确定所述双电机线控转向系统中各个转向电机的转矩指令值;
30、控制模块,用于基于所述各个转向电机的转矩指令值驱动所述双电机线控转向系统运行。
31、优选的,所述车辆状态参数包括:
32、当前时刻的车辆质心侧偏角、车辆质量、车辆质心到前轴的距离、车辆质心距后轴的距离、车辆纵向速度、前及后轮胎的侧偏刚度、车辆绕z轴的转动惯量。
33、进一步的,所述第一确定模块还用于:
34、根据滤波处理后的所述车辆状态参数构建二自由度车辆模型;
35、根据滤波处理后的车辆的横摆角速度构建未知输入观测器;
36、根据所述二自由度车辆模型、未知输入观测器确定所述车辆中双电机线控转向系统的转向轮转向角估计值。
37、本技术的实施例提供的技术方案至少带来以下有益效果:
38、本技术提出了一种双电机线控转向系统转向角冗余控制方法及系统,其中所述方法包括:获取车辆的横摆角速度、车辆状态参数、转向电机的失效状态和期望转向角,并对所述横摆角速度和所述车辆状态参数进行滤波处理;根据滤波处理后的所述横摆角速度和所述车辆状态参数确定所述车辆中双电机线控转向系统的转向轮转向角估计值;根据所述期望转向角和所述转向轮转向角估计值,并利用自适应非奇异快速终端滑模控制的方式,确定所述双电机线控转向系统的转向电机总转矩;根据所述驱动电机总转矩和所述转向电机的失效状态采用动态分配的方式确定所述双电机线控转向系统中各个转向电机的转矩指令值;基于所述各个转向电机的转矩指令值驱动所述双电机线控转向系统运行。本技术提出的技术方案,实现了转向角的精确控制且鲁棒性较强。
39、本技术附加的方面以及优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240808/270974.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表