一种人形机器人步态分析与识别及机器人控制方法
- 国知局
- 2024-08-08 16:54:06
本发明涉及机器人控制,尤其是涉及一种基于预训练模型的人形机器人步态分析与识别方法及机器人控制方法。
背景技术:
1、人形机器人能够适应室内环境和使用专为人类设计的工具,在家庭服务中具有广阔的应用前景。然而,目前人形机器人的步态控制依然处于起步阶段,存在许多困难需要解决。首先,现有的步态控制策略大多是通过处理原始传感器数据,来输出要执行的关节动作,这种方法并不能让机器人学习到高层的步态规律。其次,机器人控制存在具有一定的危险性和未知性,一个类人大小的机器人失去平衡并摔倒会造成非常严重的伤害,因此实时监控机器人的状态是一个非常重要的过程,然而目前在机器人领域,并没有统一的标准来对步态进行分析。
2、步态对称性,一致性,以及健康程度等状态可作为重要参数帮助机器人调整至合理步态,而估计出的机器人动作可为机器人的下一步控制提供先验信息,本发明提出的五种人形机器人步态评估指标介绍如下。
3、1)步态对称性:对称性作为一项评估人类步态的重要指标,同样在机器人领域也有很大的研究价值。步态对称性可以用来评估机器人的稳定性和运动规范性,通过分析机器人在行走或奔跑时的对称性还可以帮助其调整姿态,提高运动效率。另外,机器人步态的不对称性还可能会增加能量的消耗。因此,步态对称性的研究对于提高机器人的运动性能和生物仿真能力具有重要意义。
4、2)步态一致性:步态一致性是评估机器人步态稳定性和可靠性的重要指标,可以反映机器人在相同条件下步态的稳定性,步态一致性好的机器人在执行相同任务时能够保持稳定的步态,具有更高的可靠性和安全性,这对于需要长时间运行或在特定环境下执行任务的机器人尤为重要。在本发明中,步态一致性大小表示在相同条件下,机器人多次运动下步态对称性的变化程度,变化程度越小,表示步态一致性越好。
5、3)步态周期状态:步态是人体运动时表现出的姿态,具有周期性和规律性,一个完整的步态周期以足部初始接触地面开始到同侧足跟再次着地结束。步态周期主要可分为支撑相和摆动相两个阶段,其中支撑相表示脚与地面保持接触的阶段,占整个步态周期的62%;摆动相表示脚在空中摆动的阶段,不与地面接触,占整个步态周期的38%。通过对步态周期参数的划分和分析,可以表征运动过程中的姿势变化。步态相位是反映步态习惯和身体协调性的重要指标,在机器人步态生成领域具有重要的应用价值。
6、4)动作识别:人类的活动识别是一个活跃的研究领域,旨在通过分析传感器数据或图像数据来识别人类的动作和行为。在机器人领域,对机器人进行动作识别可以提高机器人的智能水平,使其能够更加灵活、高效地与环境进行交互和合作。本发明可识别的动作包括站、坐、躺、走、跑、上下坡、上下楼梯。
7、5)健康检测:基于步态的人体健康检测是一种非侵入性、简便有效的方法,通过步态分析能够提取到人体的初级运动皮层、基底神经节和小脑功能的重要信息,可为健康管理和疾病预防提供重要参考。同理,通过分析人形机器人的步态,可以检测到机器人步态异常,帮助机器人及时调整控制策略,以实现更合理的运动。
技术实现思路
1、本发明的目的是克服上述现有技术存在的缺陷而提供一种基于预训练模型的人形机器人步态分析及机器人控制方法及机器人控制方法。
2、本发明的目的可以通过以下技术方案来实现:
3、作为本发明的第一方面,提供一种人形机器人步态分析方法,所述方法步骤包括:
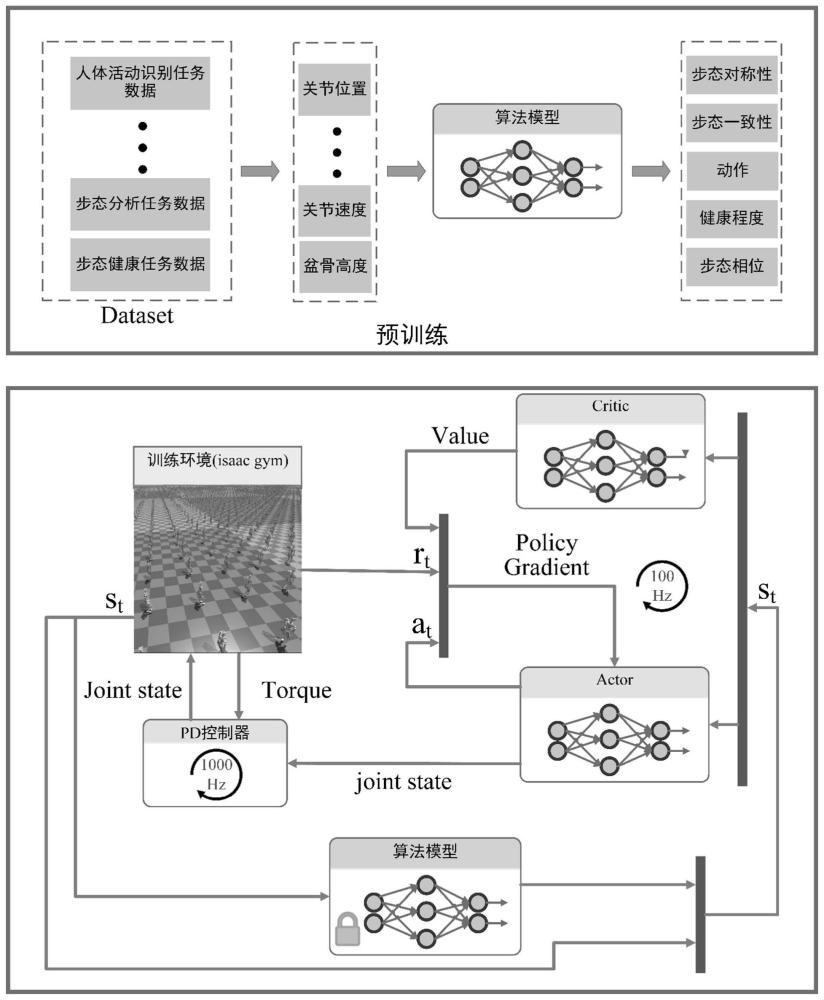
4、利用采集到的步态数据预训练步态分析与识别模型,用于评估人形机器人的步态参数,所述的步态参数包括:步态对称性、步态一致性、动作、步态相位以及步态健康程度;
5、基于预训练的步态分析与识别模型实时估计出的步态参数。
6、作为优选技术方案,所述步态分析与识别模型采用动态时间规整算法计算左右腿时域信号的波形相似度以获得步态对称性,具体如下:
7、对于左右腿时间序列分别构造一个n×m的矩阵网格,矩阵的位置(i,j)用于存储点ai和点bj的欧式距离;
8、在矩阵网格中,元素的连续集构成路径作为规整路径w;
9、找出最短累计距离的路径:
10、
11、其中,k表示路径点的个数,ωk表示规整路径w的第k个元素;
12、初始化距离矩阵d,将d(1,1)设置为左腿时间序列a和右腿时间序列b的第一个元素之间的距离;
13、从起始点开始,通过迭代计算得到的最小累加值d(n,m),即左腿时间序列和右腿时间序列之间的最短累计距离dtw(a,b)。
14、作为优选技术方案,所述步态分析与识别模型通过计算多次重复运动得到的步态对称性的方差,评估步态的一致性。
15、作为优选技术方案,所述步态分析与识别模型的实时动作识别采用基于convlstm的动作分类模型来对动作进行分类,所述的动作分类模型由卷积层、lstm层、maxpool2d层以及全连接层组成,其中所述动作分类模型的输出层设置有多个神经元组成,用于分类表示不同种类的动作。
16、作为优选技术方案,所述的实时动作识别采用滑动窗口的机制对机器人动作进行实时检测,基于设定的窗口长度,窗口移动频率以及重叠率截取步态信号,将截取到的运动数据输入到所述基于convlstm的动作分类模型中实时识别动作。
17、作为优选技术方案,所述步态分析与识别模型的步态健康程度评估具体如下:
18、收集健康受试者步态以及患者步态,构建起一个人体步态数据集,训练健康评估模型;所述的健康评估模型采用convlstm模型,由卷积层、lstm层、maxpool2d层以及全连接层组成,其中所述健康评估模型的输出层的神经元数量设为1。
19、作为优选技术方案,所述步态相位的分类包括:一个完整步态周期中的跟着地、足平放、支撑中期、足跟离地、脚尖离地、摆动周期以及非步行动作;所述的步态相位采用全连接网络模型实现评估。
20、作为本发明的第二方面,提供一种机器人控制方法,所述方法步骤包括:
21、基于如上任一所述的人形机器人步态分析方法建立预训练的步态分析与识别模型;
22、将所述预训练的步态分析与识别模型部署到人形机器人控制策略中;
23、将所述的步态分析与识别模型实时估计出的步态参数加入人形机器人控制策略的状态空间,由控制策略生成并执行相应的行为动作。
24、作为优选技术方案,所述的状态空间包括:人形机器人关节的位置和速度、在局部坐标系下人形机器人的关节相对于根节点的相对位置、方向、线速度和角速度、人形机器人骨盆距离地面的高度以及机器人的步态对称性、步态一致性、动作、步态相位与步态健康程度。
25、作为优选技术方案,所述的人形机器人控制策略以近端策略优化算法作为强化学习的核心框架,采用全连接网络来构建策略网络与价值网络;
26、所述的策略网络用于生成并执行相应的行为动作,所述的价值网络负责评估策略网络生成的动作所带来的价值。
27、与现有技术相比,本发明具有以下有益效果:
28、本发明中提出了一种步态分析与识别算法,用于评估人形机器人在运动时的对称性、一致性,同时识别机器人的动作及其步态相位,以量化机器人的步态参数。具体来说,通过采集人体或人形机器人的大规模步态数据,训练出一个步态分析与识别模型,并将此预训练模型部署到人形机器人中,以实时评估出人形机器人的多种步态参数。同时,估计出的步态参数加入强化学习算法的状态空间,以提高机器人在学习过程中的表现。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表