基于激光雷达的三维点云特征提取系统和方法
- 国知局
- 2024-08-08 17:04:23
本发明涉及桥梁勘测,具体为基于激光雷达的三维点云特征提取系统和方法。
背景技术:
1、桥梁,一般会指架设在江河湖海上,使车辆行人等能顺利通行的构筑物。为适应现代高速发展的交通行业,桥梁亦引申为跨越山涧、不良地质或满足其他交通需要而架设的使通行更加便捷的建筑物。桥梁一般由上部构造、下部结构、支座和附属构造物组成,上部结构又称桥跨结构,是跨越障碍的主要结构;下部结构包括桥台、桥墩和基础;支座为桥跨结构与桥墩或桥台的支承处所设置的传力装置。
2、混凝土桥梁需要定期进行检测,检测是否有裂缝存在,对于混凝土桥梁底面的裂缝,目前国内外主要检测方法是人工检测和巡检机器人检测;人工检测检测数据不够准确、检测速度慢、消耗时间长、效率低、危险性高且劳动强度大;使用现有技术中的巡检机器人虽能够降低劳动强度并降低了危险性,但适用范围不广,造价成本高且稳定性差,容易出现图像不连续、漏拍或重复拍摄问题,检测效率低下。因此,设计检测效率高和检测精准的基于激光雷达的三维点云特征提取系统和方法是很有必要的。
技术实现思路
1、本发明的目的在于提供基于激光雷达的三维点云特征提取系统和方法,以解决上述背景技术中提出的问题。
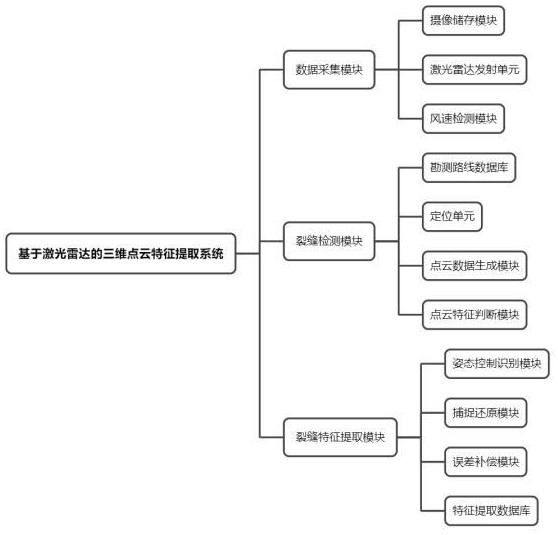
2、为了解决上述技术问题,本发明提供如下技术方案:基于激光雷达的三维点云特征提取系统,包括数据采集模块、裂缝检测模块、裂缝特征提取模块,所述数据采集模块用于采集无人机平台通过激光雷达勘测桥梁的相关信息,所述裂缝检测模块用于对桥梁裂缝进行检测识别,所述裂缝特征提取模块用于根据所述裂缝检测模块的检测信号,提取裂缝特征,对检测结果核验以及对裂缝关联属性分析,所述数据采集模块与裂缝检测模块电连接,所述裂缝特征提取模块与裂缝检测模块电连接。
3、根据上述技术方案,所述数据采集模块包括摄像储存模块、激光雷达发射单元和风速检测模块,所述摄像储存模块用于通过无人机勘测桥梁期间对勘测印象记录储存,所述激光雷达发射单元用于发射激光脉冲并接收反射回来的信号,以获取桥梁目标检测区域的三维坐标信息,所述风速检测模用于实时的检测环境风速。
4、根据上述技术方案,所述裂缝检测模块包括勘测路线数据库、定位单元、点云数据生成模块和点云特征判断模块,所述勘测路线数据库用于预设储存勘测桥梁的无人机飞行路线,所述定位单元用于实时定位捕捉勘测过程中无人机的坐标位置,所述点云数据生成模块用于拟合生成桥梁的点云数据,所述点云特征判断模块用于判断点云数据的特征,实现桥梁裂缝检测的目的。
5、根据上述技术方案,所述裂缝特征提取模块包括姿态控制识别模块、捕捉还原模块、误差补偿模块和特征提取数据库,所述姿态控制识别模块用于识别无人机的姿态变化,所述捕捉还原模块与所述姿态控制识别模块电连接,所述捕捉还原模块用于根据无人机的巡航姿态变动记录对捕捉的三维点位进行特征还原模拟,所述误差补偿模块用于对点云数据进行误差补偿,所述特征提取数据库用于预设储存勘测桥梁的各类裂缝特征。
6、一种基于激光雷达的三维点云特征提取方法,该方法包括以下步骤:
7、步骤s1:响应于桥梁勘测任务,平台调取勘测路线数据库控制无人机启动执行桥梁勘测任务,无人机根据数据库中勘测路线飞行;
8、步骤s2:无人机对桥梁勘测期间,通过无人机装备的激光雷达设备发射激光脉冲并接收反射回来的信号,以获取勘测目标的三维坐标信息;
9、步骤s3:同时利用摄像储存模块全程记录勘测期间的拍摄影像资料;
10、步骤s4:通过风速检测模块,实时检测勘测期间的环境风速值v;
11、步骤s5:将接收反射回来的信号转化生成三维点云数据,并识别检测桥梁是否存在裂缝;
12、步骤s6:当识别检测到裂缝时,裂缝特征提取模块启动,进一步对裂缝特征提取分析,快速识别并输出裂缝的特征值。
13、根据上述技术方案,所述步骤s5进一步包括以下步骤:
14、步骤s51:无人机通过装备的激光雷达设备向桥梁底面发射若干组激光雷达脉冲信号,若干组激光雷达脉冲信号组成一组空间探测区域,对空间探测区域范围内的桥梁底面进行探测;
15、步骤s52:当激光雷达探测信号感应到桥梁底部目标时,捕捉反射回来的雷达信号;
16、步骤s53:建立空间点云模型,结合定位单元获取到的无人机当前位置,在空间点云模型中根据雷达点阵电信号在反馈接收时间差和单束点阵激光雷达脉冲信号的发射方向,在空间点云模型中生成相应的点云精确位置(x,y,z);
17、步骤s54:将若干组相应点云精确位置拟合,生成桥梁底部的三维点云特征数据;
18、步骤s55:对生成桥梁底部的三维点云特征数据进行识别判断,利用系统预设的标准桥梁底部三维点云对生成桥梁底部的三维点云特征数据进行噪点提取,当提取噪点的点云数大于n时,点云特征判断模块判断勘测到桥梁底部存在裂缝。
19、根据上述技术方案,所述步骤s55中对生成桥梁底部的三维点云特征数据进行噪点提取的方法进一步包括:
20、步骤s551:设置提取噪点的误差标准l;
21、步骤s552:获取对应点云生成时刻的环境风速值v;
22、步骤s553:技术提取噪点的动态判断标准;其中k为系数,为大于0的常数;
23、步骤s554:将对应生成的点云与预设的标准桥梁底部三维点云空间距离计算,其中分别为一束三维点云在标准桥梁底部三维点云的空间位置;
24、步骤s555:当时,对当前点云进行噪点提取。
25、根据上述技术方案,所述步骤s6进一步包括:
26、步骤s61:一旦裂缝检测系统识别并确认存在裂缝,系统将触发裂缝特征提取模块的启动指令;
27、步骤s62:姿态控制识别模块开始运行,实时监测无人机的姿态变化数据;
28、步骤s63:捕捉还原模块接收姿态控制识别模块传递的姿态数据;根据无人机的巡航姿态变动记录,捕捉还原模块对捕捉到的三维裂缝点位进行特征还原模拟;
29、步骤s64:根据无人机的姿态变化数据,对裂缝特征数据进行姿态校正;
30、步骤s65:建立特征提取数据库,裂缝特征数据被送入特征提取数据库进行比对和分析,将实时数据与数据库中的预设特征进行匹配和对比;
31、步骤s66:基于特征提取数据库的比对结果,识别出裂缝的具体特征,并快速输出特征结果至系统。
32、与现有技术相比,本发明所达到的有益效果是:本发明,通过无人机搭载激光雷达设备,能够高效、准确地获取桥梁底部的三维点云数据,并利用先进的算法实现对裂缝特征的快速精准检测与识别。不仅克服了传统勘测方法中接触式测量和人为误差的局限,还通过无人机姿态控制识别、捕捉还原模块以及风速检测模块的协同工作,提高了裂缝检测的准确性和稳定性。此外,通过建立特征提取数据库,本发明能够快速识别裂缝的具体特征,为后续的桥梁维护提供有力支持。达到了自动化程度高、测量精度高、检测速度快的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240808/272187.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表