一种永磁同步电机无位置传感器控制方法
- 国知局
- 2024-08-19 14:24:22
本发明属于电机控制,具体涉及一种基于二阶广义积分器-复系数滤波器(sogi-ccf)的永磁同步电机无位置传感器控制方法。
背景技术:
1、永磁同步电机因其功率密度高、体积小、控制精度高等优点,被广泛的应用于各类工业领域。在实际工程中,通常采用矢量控制方法作为永磁同步电机的控制策略,而矢量控制需要得到电机转子的实时位置,电机转子的实时位置一般采用霍尔位置传感器、光电编码器或者磁编码器等位置检测装置获得。但是由于位置传感器增加了成本,以及在一些恶劣工作环境中位置传感器的可靠性问题,无位置传感器控制成为了近年来的研究热点。非线性磁链观测器由junggi lee等学者提出,并应用于电机的无速度传感器控制系统。该观测器能在零低速下估算电机转子位置,由于其结构简单,鲁棒性强等优点,受到广泛应用。
2、在实际工程中,受逆变器非线性、采样电路偏置不均、开关器件死区时间,空间磁链分布不均等因素影响,磁链观测器会受到积分器饱和以及电压、电流和反电势三种谐波干扰的影响,这将会降低磁链观测结果的准确性,导致转子估算位置与实际位置的角度误差增大,从而影响了电机调速的控制性能。为了解决上述问题,学者们将二阶广义积分器引入到传统磁链观测器中,取代了直接积分环节,对谐波进行抑制。但由于非线性磁链观测器在结构上与传统磁链观测器不同,是先通过积分环节获得定子磁链再与电感磁链做差得到转子磁链,因此即便引入二阶广义积分器替换掉直接积分环节,在定子磁链与电感磁链做差的过程中依然会将电流谐波引入,并且传统二阶广义积分器算法虽能有效抑制高次谐波,但对基频附近的谐波干扰抑制能力较弱。根据理论分析和实验验证发现,-5次和+7次谐波干扰对磁链观测器的观测结果有较大影响,因此提升非线性磁链观测器的位置观测性能和抗谐波干扰能力具有重要的理论和实际意义。
技术实现思路
1、本发明的目的在于克服传统技术中存在的上述问题,提供一种基于二阶广义积分器-复系数滤波器的永磁同步电机无位置传感器控制方法。
2、为实现上述技术目的,达到上述技术效果,本发明是通过以下技术方案实现:
3、本发明提供一种基于二阶广义积分器-复系数滤波器的永磁同步电机无位置传感器控制方法,包括如下步骤:
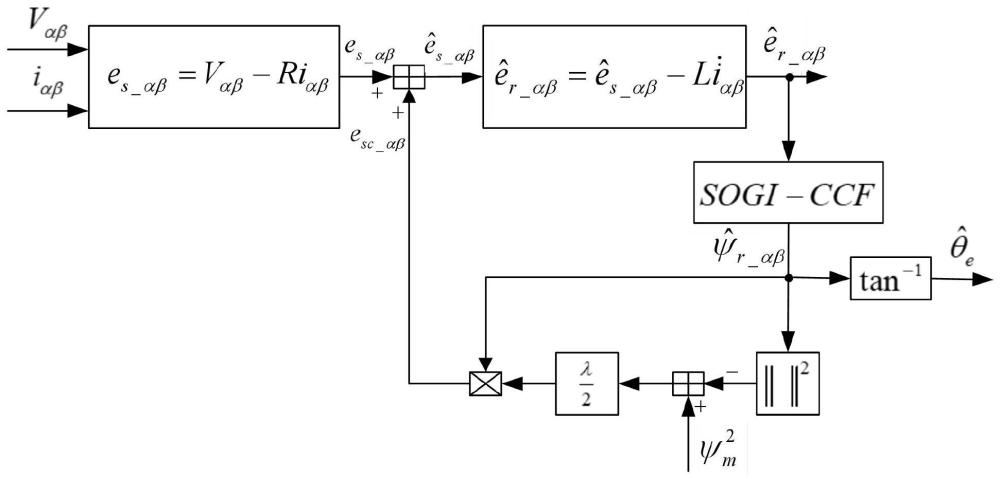
4、s1、利用永磁同步电机在α-β坐标系下的电压模型计算出电机定子电动势es_αβ;
5、s2、将步骤s1中计算出的电机定子电动势es_αβ与定子电动势补偿值esc_αβ相加得到电机定子电动势估计值,再经永磁同步电机在α-β坐标系下的电流模型计算出电机转子电动势估计值;
6、s3、采用基于复系数滤波器的二阶广义积分器对步骤s2中得到的电机转子电动势估计值进行处理,得到α-β坐标系下的电机转子磁链估计值;
7、s4、取步骤s3中得到的α-β坐标系下的电机转子磁链估计值的模值与电机永磁体磁链值ψm作差得到永磁体磁链估计误差ψm_error;
8、s5、采用标准梯度下降法将步骤s4中得到的永磁体磁链估计误差ψm_error处理为永磁同步电机定子电动势的补偿值esc_αβ,并返回步骤s1进行下一周期的计算。
9、进一步地,步骤s1中,永磁同步电机在α-β坐标系下的电压模型为:
10、
11、式中,es_α为电压模型中永磁同步电机α轴定子电动势;为电压模型中永磁同步电机α轴定子磁链的微分;es_β为电压模型中永磁同步电机β轴定子电动势;为为电压模型中永磁同步电机β轴定子磁链的微分;iα为电机α轴定子电流;iβ为电机β轴定子电流;vα为电机α轴定子电压;vβ为电机β轴定子电压;rs为电机相电阻。
12、进一步地,步骤s2中,电机转子电动势估计值的计算方法为:
13、
14、式中,为α轴电机转子电动势估计值;为β轴电机转子电动势估计值;es_α为根据电机电压模型计算出的α轴电机定子电动势;es_β为根据电机电压模型计算出的β轴电机定子电动势;esc_α为α轴电机定子电动势补偿值;esc_β为β轴电机定子电动势补偿值;ls为电机相电感;iα为电机α轴电流;iβ为电机β轴电流。
15、进一步地,步骤s3中基于复系数滤波器的二阶广义积分器的结构为:
16、
17、式中,d1(s)为基频信号的传递函数;d-5(s)为-5次谐波信号的传递函数;d7(s)为+7次谐波信号的传递函数;s为复平面变量;为α-β坐标系下的转子磁链估计值,即所提二阶广义积分器-复系数滤波器的输出信号;为α-β坐标系下根据电流模型计算出的转子电动势估计值,即所提二阶广义积分器-复系数滤波器的输入信号;为α-β坐标系下转子电动势的基频估计值;为α-β坐标系下转子电动势的-5次谐波估计值;为α-β坐标系下转子电动势的+7次谐波估计值。
18、进一步地,步骤s3中二阶广义积分器-复系数滤波器的传递函数dsogi-ccf(s)表示为:
19、
20、其中d1(s)、d-5(s)、d7(s)的具体结构表示为:
21、
22、式中,d1(s)为基频信号的传递函数;kf1为基频下的算法增益系数,ω1为基波信号的中心频率,s为复平面变量,d-5(s)为-5次谐波信号的传递函数,kf-5为-5次谐波信号下的算法增益系数,ω-5为-5次谐波信号的中心频率,d7(s)为+7次谐波信号的传递函数,kf7为+7次谐波信号下的算法增益系数,ω7为+7次谐波信号的中心频率。
23、进一步地,α-β坐标系下的基波中心频率ω′αβ将由锁频环(fll)给出,锁频环的控制律如下式所示:
24、
25、式中,γ是锁频环的增益系数;εr_1αβ是与的差值。
26、二阶广义积分器-复系数滤波器结构兼具对-5次和+7次谐波的消除、对高次谐波的抑制、对基频信号的积分三种作用,经过二阶广义积分器-复系数滤波器的处理后将得到α-β坐标系下无噪声和谐波干扰的电机转子磁链估计值
27、进一步地,步骤s4中永磁体磁链估计误差ψm_error的计算方法为:
28、
29、式中,ψm为电机永磁体磁链值;为电机α轴转子磁链的估计值;为电机β轴转子磁链的估计值;ψm_error为永磁体磁链估计误差。
30、进一步地,步骤s5中基于标准梯度下降法将永磁体磁链估计误差处理为永磁同步电机的定子电动势补偿值esc_α的计算方法为:
31、
32、式中,esc_α为电机α轴定子电动势补偿值;esc_β为电机β轴定子电动势补偿值;λ为标准梯度下降法的增益;ψm_error为永磁体磁链估计误差。
33、本发明的有益效果是:
34、1、本发明优化了传统非线性磁链观测器结构并引入了基于复系数滤波器的二阶广义积分器,相比于传统非线性磁链观测器,本发明对位置观测结果影响较大的低次谐波有着更好的抑制能力,提升了位置观测的精度和抗谐波干扰能力。
35、2、本发明提供一种基于二阶广义积分器-复系数滤波器的永磁同步电机无位置传感器控制方法。逆变器死区时间、参数失配、空间磁链分布不均等因素,导致永磁同步电机的电压、电流和反电动势中掺杂谐波干扰,降低了转子磁链观测的精度,影响了电机的调速性能。本发明提出根据电机在α-β坐标系下的电压和电流模型计算出转子电动势,再经过基于复系数滤波器的二阶广义积分器处理后得到转子磁链,复系数滤波器有效地消除了对观测结果影响较大的-5次和+7次谐波分量,二阶广义积分器对高阶谐波进行了抑制,因此本发明所提供的方法能够对转子磁链进行准确观测,提高了转子位置的观测精度。结合矢量控制方法,本发明可用于永磁同步电机的高精度无感调速控制系统。
本文地址:https://www.jishuxx.com/zhuanli/20240819/275088.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表