应用于智能轮椅的三维扫描姿态感应系统及其方法
- 国知局
- 2024-08-19 14:28:10
本发明属于智能轮椅控制,具体涉及应用于智能轮椅的三维扫描姿态感应系统及其方法。
背景技术:
1、轮椅是帮助老年人和残疾人康复的重要辅助工具,随着传感器技术、人工智能技术、工业制造技术的飞速发展,使得智能轮椅逐渐进入普通家庭的视野,相较于传统轮椅,智能轮椅具有功能多样化、省时省力、易学易操作、个性化的特点,除基础的运动控制外,还增加了定位导航、语音交互、避障、多传感器测量、多结构变换等智慧功能。智能轮椅按照老年人和残疾人日常生活场合的不同可以划分为室外智能轮椅和室内智能轮椅。室内环境是静态环境,相关静态环境下的室外智能轮椅技术已经很成熟了,但是室外环境是动态环境,复杂多变的环境,尤其是动态场景下智能轮椅反应缓慢,避让不及导致室外智能轮椅控制提高了难度。
技术实现思路
1、本发明要解决的问题为了实现动态场景下智能轮椅的精准控制,提出应用于智能轮椅的三维扫描姿态感应系统及其方法。
2、为实现上述目的,本发明通过以下技术方案实现:
3、一种用于智能轮椅的三维扫描姿态感应方法,包括如下步骤:
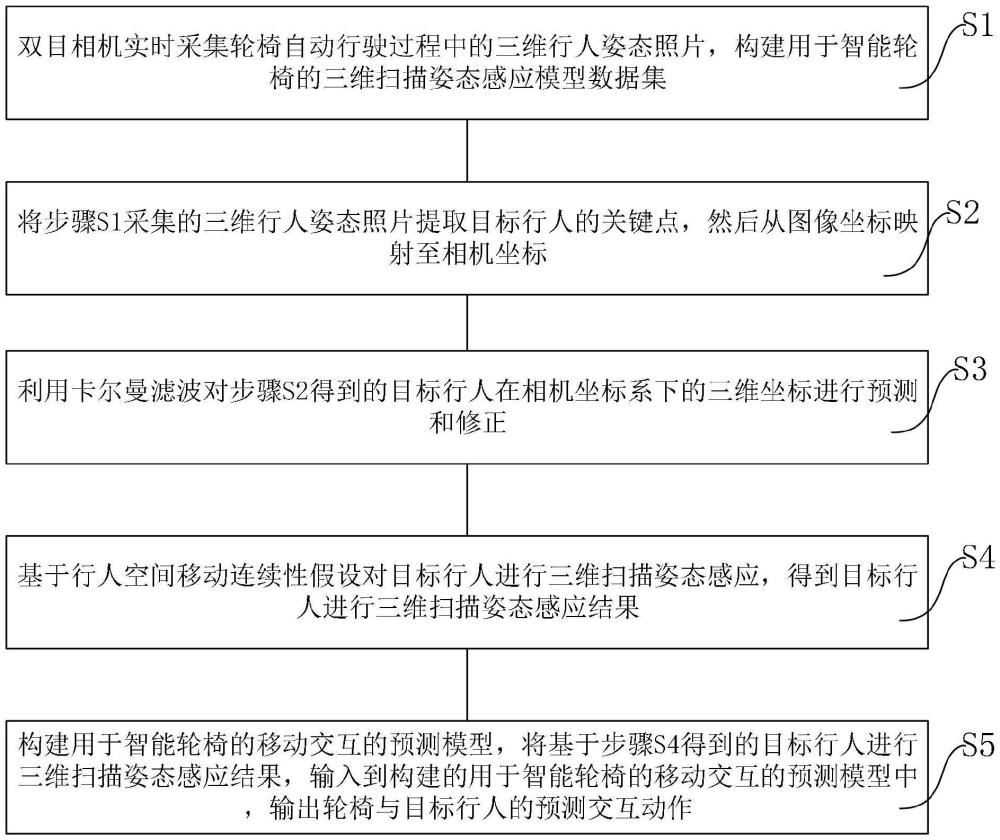
4、s1.双目相机实时采集轮椅自动行驶过程中的三维行人姿态照片,构建用于智能轮椅的三维扫描姿态感应模型数据集;
5、s2.将步骤s1采集的三维行人姿态照片提取目标行人的关键点,然后从图像坐标映射至相机坐标;
6、s3.利用卡尔曼滤波对步骤s2得到的目标行人在相机坐标系下的三维坐标进行预测和修正;
7、s4.基于行人空间移动连续性假设对目标行人进行三维扫描姿态感应,得到目标行人进行三维扫描姿态感应结果;
8、s5.构建用于智能轮椅的移动交互的预测模型,将基于步骤s4得到的目标行人进行三维扫描姿态感应结果,输入到构建的用于智能轮椅的移动交互的预测模型中,输出轮椅与目标行人的预测交互动作。
9、进一步的,步骤s2的具体实现方法为对步骤s1采集的三维行人姿态照片进行人体姿态估计,得到目标行人的关键点像素坐标,利用关键点像素坐标在点云图中进行索引,将像坐标映射至相机坐标,得到目标行人的关键点的三维相机坐标。
10、进一步的,步骤s3的具体实现方法包括如下步骤:
11、s3.1.设置目标行人在相机坐标系下的三维坐标下的预测方程的表达式为:
12、yt=ayt-1+but-1
13、其中,y’t为t时刻的最优预测值,yt-1为t-1时刻的最优预测值,a为状态转移矩阵,b为将控制向量转化为状态的矩阵,ut-1为t-1时刻的控制向量;
14、s3.2.基于t-1时刻的最优预测值的误差pt-1计算t时刻的最优预测值的误差pt,表达式为:
15、pt=apt-1at+q
16、其中,q为过程激励噪声协方差;
17、s3.3.基于t时刻的最优预测值的误差pt和t时刻的测量值的误差r,计算t时刻的卡尔曼增益kt,表达式为:
18、kt=ptht(hptht+r)-1
19、其中,h为观测转换矩阵;
20、s3.4.计算卡尔曼滤波的最终输出结果yt’,表达式为:
21、yt’=yt+kt(zt-hyt)
22、其中,zt为卡尔曼滤波的输入;
23、计算卡尔曼滤波的最终输出结果的误差pt’,表达式为:
24、pt’=(i-kth)pt
25、其中,i为单位矩阵。
26、进一步的,步骤s4中设置t-1时刻的第i个目标行人的三维相机坐标为设置t时刻的第i个目标行人的三维相机坐标为则行人空间移动连续性假设的表达式为:
27、
28、其中,argmin为其定义域中取得最小值的参数值的函数,u为行人空间移动连续性假设的阈值。
29、进一步的,步骤s5构建用于智能轮椅的移动交互的预测模型的具体实现方法包括如下步骤:
30、s5.1.采用a星算法作为用于智能轮椅的移动交互的路径规划方法,建立代价函数实现用于智能轮椅的移动交互的路径规划,表达式为:
31、f(n)=g(n)+h(n)
32、其中,f(n)为从初始路径经由路径节点n到目标状态的代价估计,g(n)为在路径空间中从初始路径到路径节点n的实际代价,h(n)为从路径节点n到目标路径的最佳路径的估计代价;
33、s5.2.基于步骤s5.1得到的路径节点和基于步骤s4得到的目标行人进行三维扫描姿态感应结果,利用dwa算法进行用于智能轮椅的移动交互的路径避让。
34、一种应用于智能轮椅的三维扫描姿态感应系统,包括处理器、存储器和存储在所述存储器中且可运行在所述处理器上的计算机程序,所述计算机程序运行时实现如本发明所述的一种应用于智能轮椅的三维扫描姿态感应方法的步骤。
35、本发明的有益效果:
36、本发明所述的一种应用于智能轮椅的三维扫描姿态感应方法,基于双目相机实时采集轮椅自动行驶过程中的三维行人姿态照片,然后提取目标行人的关键点,然后从图像坐标映射至相机坐标,利用卡尔曼滤波对得到的目标行人在相机坐标系下的三维坐标进行预测和修正,然后构建行人空间移动连续性假设对目标行人进行三维扫描姿态感应,本方法能够实现动态场景下智能轮椅的实时精准控制,实现室外动态场景下的三维扫描姿态准确定位。
37、本发明所述的一种应用于智能轮椅的三维扫描姿态感应方法,将实时定位的室外动态场景下的三维扫描姿态输入到用于智能轮椅的移动交互的预测模型,实现智能轮椅在室内外环境下对目标行人进行安全稳定的行进。
技术特征:1.一种用于智能轮椅的三维扫描姿态感应方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种用于智能轮椅的三维扫描姿态感应方法,其特征在于,步骤s2的具体实现方法为对步骤s1采集的三维行人姿态照片进行人体姿态估计,得到目标行人的关键点像素坐标,利用关键点像素坐标在点云图中进行索引,将像坐标映射至相机坐标,得到目标行人的关键点的三维相机坐标。
3.根据权利要求2所述的一种用于智能轮椅的三维扫描姿态感应方法,其特征在于,步骤s3的具体实现方法包括如下步骤:
4.根据权利要求3所述的一种用于智能轮椅的三维扫描姿态感应方法,其特征在于,步骤s4中设置t-1时刻的第i个目标行人的三维相机坐标为设置t时刻的第i个目标行人的三维相机坐标为则行人空间移动连续性假设的表达式为:
5.根据权利要求4所述的一种用于智能轮椅的三维扫描姿态感应方法,其特征在于,步骤s5构建用于智能轮椅的移动交互的预测模型的具体实现方法包括如下步骤:
6.一种应用于智能轮椅的三维扫描姿态感应系统,其特征在于,包括处理器、存储器和存储在所述存储器中且可运行在所述处理器上的计算机程序,所述计算机程序运行时实现如权利要求1-5任一项所述的一种应用于智能轮椅的三维扫描姿态感应方法的步骤。
技术总结应用于智能轮椅的三维扫描姿态感应系统及其方法,属于智能轮椅控制技术领域。为了实现动态场景下智能轮椅的精准控制,本发明采集轮椅自动行驶过程中的三维行人姿态照片,构建用于智能轮椅的三维扫描姿态感应模型数据集;将采集的三维行人姿态照片提取目标行人的关键点,然后从图像坐标映射至相机坐标;利用卡尔曼滤波对目标行人在相机坐标系下的三维坐标进行预测和修正;基于行人空间移动连续性假设对目标行人进行三维扫描姿态感应,得到目标行人进行三维扫描姿态感应结果;构建用于智能轮椅的移动交互的预测模型,将基于目标行人进行三维扫描姿态感应结果,输入到构建的用于智能轮椅的移动交互的预测模型中,输出轮椅与目标行人的预测交互动作。技术研发人员:颜钰婷,王梓宁,林思奇,李泳茵,胡子惠,王北一,李杜彧受保护的技术使用者:广东职业技术学院技术研发日:技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/275312.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表