机器人控制装置、机器人系统以及机器人控制程序的制作方法
- 国知局
- 2024-08-19 14:34:07
本发明涉及机器人控制装置、机器人系统以及机器人控制程序。
背景技术:
1、至今为止,由多个手指握持工件的机器人的控制装置被众所周知。例如,在专利文献1中公开了在由多个手指握持工件时,根据工件的形状等调整多个手指的间隔的技术。
2、专利文献1:日本特开2021-84210号公报
技术实现思路
1、不过,在工件的握持作业中,首先,通过使手移动到可握持工件的位置即工件被配置在多个手指之间的位置,从该状态使手指进行闭动作,来用手指握持工件。也就是说,使手适当移动到握持位置是为了握持工件而必须的。
2、但是,当手的位置精度以及工件的位置精度等较低时,有时手指会干扰到工件等,而不能使手适当移动到可握持工件的位置。
3、鉴于上述内容,本发明的目的在于简单地实现由多个手指对工件的适当握持。
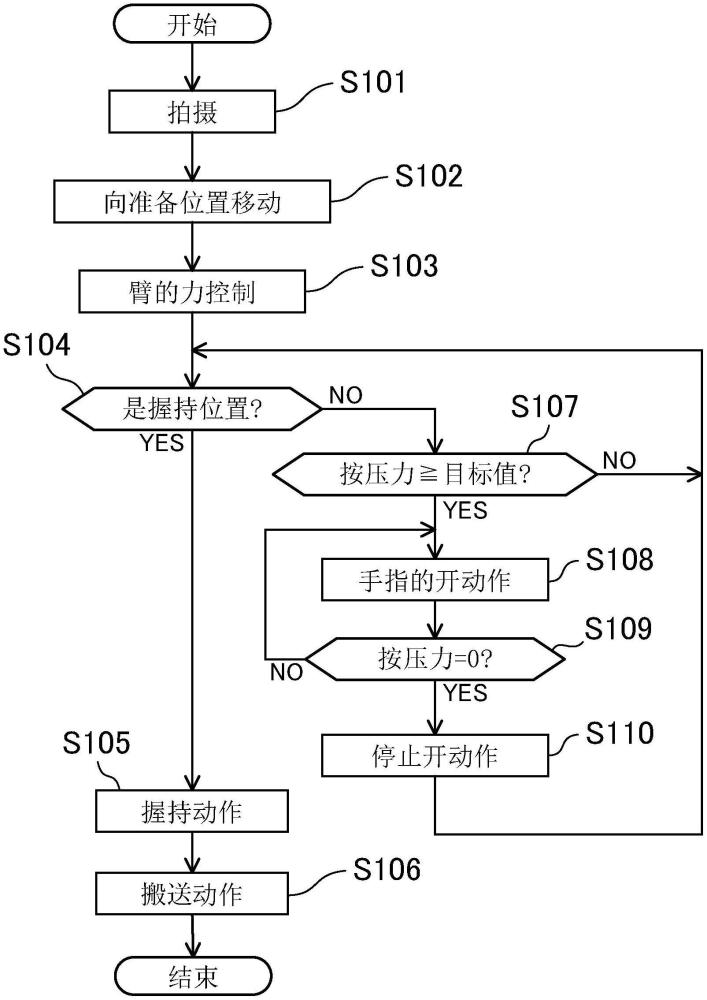
4、本发明的机器人控制装置包括移动控制部和开闭控制部,所述移动控制部使设置有手的臂移动,所述开闭控制部使设置在所述手的多个手指向规定的开闭方向开闭,所述移动控制部使所述臂执行接触动作,所述接触动作使所述手指向与所述开闭方向交叉的按压方向接触到工件,所述开闭控制部在所述接触动作之后使所述手指执行开动作,所述移动控制部在通过所述开动作使得所述手指相对于工件成为非接触之后,使所述臂执行接近动作,所述接近动作使所述手向所述按压方向移动到工件被配置在多个所述手指之间的规定的握持位置为止,所述开闭控制部通过在所述手位于所述握持位置的状态下使所述手指执行闭动作,来使所述手指握持工件。
5、本发明的机器人系统包括手、臂和所述机器人控制装置,所述手设置有可开闭的多个手指,所述臂设置有所述手。
6、本发明的机器人控制程序使计算机实现使设置有手的臂执行接触动作的功能、在所述接触动作之后使手指执行开动作的功能、在通过所述开动作使得所述手指相对于工件成为非接触之后使所述臂执行接近动作的功能和通过在所述手位于握持位置的状态下使所述手指执行闭动作来使所述手指握持工件的功能,所述接触动作使设置在所述手且可向规定的开闭方向开闭的多个所述手指中的至少一个所述手指向与所述开闭方向交叉的按压方向接触到工件,所述接近动作使所述手向所述按压方向移动到工件被配置在多个所述手指之间的规定的所述握持位置为止。
7、(发明效果)
8、根据所述机器人控制装置,能够简单地实现由多个手指对工件的适当握持。
9、根据所述机器人系统,能够简单地实现由多个手指对工件的适当握持。
10、根据所述机器人控制程序,能够简单地实现由多个手指对工件的适当握持。
技术特征:1.一种机器人控制装置,其特征在于:
2.根据权利要求1所述的机器人控制装置,其特征在于:
3.根据权利要求2所述的机器人控制装置,其特征在于:
4.根据权利要求3所述的机器人控制装置,其特征在于:
5.根据权利要求1所述的机器人控制装置,其特征在于:
6.一种机器人系统,其特征在于:
7.根据权利要求6所述的机器人系统,其特征在于:
8.根据权利要求6所述的机器人系统,其特征在于:
9.根据权利要求8所述的机器人系统,其特征在于:
10.一种机器人控制程序,其特征在于:
技术总结本发明提供一种机器人控制装置。机器人控制装置(5)包括移动控制部(55)和开闭控制部(56),所述移动控制部(55)使设置有手(3)的机器人臂(2)移动,所述开闭控制部(56)使设置在手(3)的多个手指(31)向规定的开闭方向开闭。移动控制部(55)使机器人臂(2)执行使手指(31)向按压方向接触到工件(W)的接触动作。开闭控制部(56)在接触动作之后使手指(31)执行开动作。移动控制部(55)在通过开动作使得手指(31)相对于工件(W)成为非接触之后,使机器人臂(2)执行接近动作,所述接近动作使手(3)向按压方向移动到握持位置为止。开闭控制部(56)通过在手(3)位于握持位置的状态下使手指(31)执行闭动作,来使手指(31)握持工件。技术研发人员:末元大树,西川隆介,高山裕规,本间敏行,入江响受保护的技术使用者:川崎重工业株式会社技术研发日:技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/275655.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表