一种基于毫米波雷达的矿井T型巷道目标定位方法
- 国知局
- 2024-08-22 14:19:55
本发明涉及一种矿井非视距人员定位方法,具体是一种基于毫米波雷达的矿井t型巷道目标定位方法,属于煤矿安全生产。
背景技术:
1、目标定位技术是通过参数测量、位置解算、结果优化等步骤确定目标节点在定位场景内的当前位置,在智能交通、工业生产、军事对抗等领域具有广泛应用。然而定位场景内通常具有较多障碍物,以煤矿井下的矿井环境为例,矿井环境内通常存在矿车、巷道壁、矿工等障碍物,且障碍物的位置和运动状态等存在不确定性,这就使得定位环境更加复杂,经常会面临非视距(nlos)目标定位问题,t型结构巷道作为常见的井下巷道结构,其非视距目标定位问题尤为突出,由于t型结构巷道的特殊性,传统的井下定位技术(如基于wi-fi、蓝牙、uwb等)往往因信号衰减和多径效应而无法提供准确的位置信息,这不仅影响作业效率、而且会增加作业风险,甚至会导致矿井驾驶安全事故的发生。因此,研发一种适用于t型结构巷道的非视距目标定位技术,对于提升煤矿井下作业的安全性和效率具有重要意义。
2、针对煤矿井下非视距目标定位的研究,早期的研究主要集中在无线传感器网络的部署和利用,试图通过多点测量和信号强度指示(rssi)来估计目标位置。随后,基于超声波和地磁感应的定位方法也被提出,这些方法在一定程度上提高了定位的准确性。然而,这些技术在面对复杂的井下环境时,仍然存在一定的局限性,尤其是在没有直视路径的t型结构巷道中,定位精度和鲁棒性仍有待提高。
3、近年来,毫米波雷达技术因其独特的优势,如高分辨率、强穿透能力和对小目标的敏感性等,开始被应用于非视距目标定位。毫米波雷达能够在复杂的井下环境中,通过墙壁和其他障碍物的反射、折射和散射实现对目标的探测和定位,这一特性使得毫米波雷达成为解决t型结构巷道非视距目标定位问题的理想选择,但现有技术中利用毫米波雷达解决非视距目标定位问题大多是将场景构建为典型l型拐角场景,对于煤矿井下的常见t型结构巷道场景的讨论不足,且适用于l型拐角场景的非视距目标定位问题并不能完全适用于t型结构巷道场景的非视距目标定位问题;另外,现有方法大多依赖于雷达回波的距离信息进行定位,对潜在的角度信息利用不足。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种基于毫米波雷达的矿井t型巷道目标定位方法,针对煤矿井下t形巷道场景的复杂环境,能够实现较理想的非视距目标检测的准确性和定位精度。
2、为实现上述目的,本基于毫米波雷达的矿井t型巷道目标定位方法具体包括以下步骤:
3、step1,简化t型巷道场景毫米波电磁传播路径:
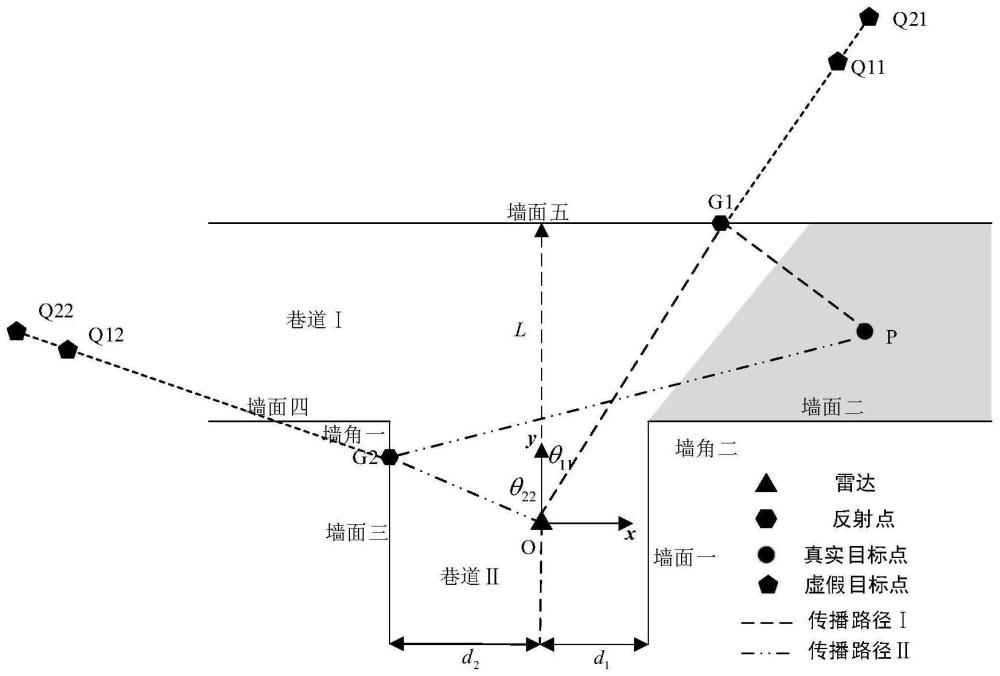
4、t型结构巷道包括巷道ⅰ以及垂直于巷道ⅰ、并与巷道ⅰ贯通的巷道ⅱ,巷道ⅰ与巷道ⅱ形成t型结构,巷道ⅱ包括墙面三和墙面一,巷道ⅰ包括未与巷道ⅱ贯通的墙面五以及与巷道ⅱ贯通的墙面四和墙面二,墙面四与墙面三相交形成墙角一,墙面二与墙面一相交形成墙角二;
5、令雷达位于巷道ⅱ内的坐标原点o处、且初始相位角为0°,且雷达至墙面五之间的距离为l、雷达至墙面三的距离为d2、雷达至墙面一的距离为d1;令目标位于墙面二与墙面五之间、且位于墙面二与墙面一相交形成的墙角二后方的非视距区域p=[x,y]点;假设各墙面均光滑、只考虑由镜面反射产生的多径信号,且只简化为毫米波的一阶反射多径,令单程一次反射路径在墙面三的反射点为g2,在墙面五的反射点为g1;则
6、发射信号的传播路径为:
7、o→g1→p,o→g2→p
8、接收信号的传播路径为:
9、p→g1→o,p→g2→o
10、信号电磁波的发射与接收路径是以上四种路径的两两组合,包括:
11、①传播路径ⅰ往返:o→g1→p,p→g1→o,电磁波信号从o点发射,经过g1点反射到达p点,返程原路返回,记为路径φ11;
12、②传播路径ⅰ+传播路径ⅱ:o→g1→p,p→g2→o,电磁波信号从o点发射,经过g1点反射到达p点,返回路径经g2点反射回雷达接收天线,记为路径φ12;
13、③传播路径ⅱ+传播路径ⅰ:o→g2→p与p→g1→o,电磁波信号从o点发射,经过g2点反射到达p点,返回路径经g1点反射回雷达接收天线,记为路径φ21;
14、④传播路径ⅱ往返:o→g2→p与p→g2→o,电磁波信号从o点发射,经过g2点反射到达p点,记为路径φ22;
15、往返路径φ11、φ22关于雷达的镜像目标点q11、q22通过几何关系计算:
16、
17、式中:[m,n]表示q11的坐标;[p,q]表示q22的坐标;
18、φ12路径回波是以g2点反射到达接收天线,其方向与镜像目标点q22相等,虚拟目标点记为q12;φ21路径回波是以g1点反射到达接收天线,其方向与镜像目标点q11相等,虚拟目标点记为q21;设q21相距雷达的距离为r21,方位角为θ21;q12相距雷达的距离为r12,方位角为θ12;则四种路径对应的虚假目标点与雷达之间的距离表示如下:
19、
20、根据q11、q22的坐标得到四种路径对应的虚假目标点对应的方位角如下:
21、
22、组合路径虚拟目标点q12、q21位置由以下公式计算:
23、
24、step2,建立基于t型巷道场景的雷达回波模型:
25、使用连续调频毫米波雷达发射毫米波对目标进行定位,设毫米波雷达的线性调频信号为s(t),其表达式为:
26、
27、式中:f0代表发射信号的起始频率;a代表发射信号幅度;b代表信号带宽,t代表信号脉冲宽度;μ为信号的调频斜率,μ=b/t;为初始相位角,
28、接收信号表示为:
29、r(t)=k1s(t-τ11)+k2s(t-τ12)+k3s(t-τ22)+k4s(t-τ44)+n(t)
30、式中:k1~k4代表4种传播路径的散射系数;n(t)代表环境和系统噪声;τ11、τ12、τ21、τ22分别代表路径φ11、φ12、φ21、φ22的传播时延;
31、τ11,τ12,τ21,τ22对应的时延计算式如下:
32、
33、式中:c代表光速;||代表两点之间的距离运算;
34、step3,收集雷达回波,完成预处理:
35、对采样后的回波信号进行mti杂波抑制,对mti处理后的信号采用脉冲压缩得到原始距离像,对原始距离像进行非相干叠加,获得距离像非相参累积信号;
36、step4,对距离像非相参累积信号采用ca-cfar检测方法获得目标距离r;
37、step5,采用最小均方无畸变响应mvdr方法获取目标方位角θ;
38、step6,根据目标距离r与目标方位角θ解算虚假目标位置点集q:
39、将极坐标系转化为笛卡尔坐标系,得到多径虚假目标点初始位置点集q,
40、q=[q1,q2,....,qn]
41、式中:qn代表解算的虚假目标位置,qn=[rn sinθn,rn cosθn];
42、step7,对虚假目标位置点集q进行多径虚假目标匹配消除,获得有效的虚假目标位置点集q′;
43、step8,对有效虚假目标点集q′进行坐标变换获得真实目标位置点集p:
44、结合先验几何场景中的距离l和d2解算有效虚假目标点对应的真实目标点集p,完成定位流程。
45、进一步的,step3中mti杂波抑制时,令雷达接收到的回波信号为r,则:
46、ri*=ri-ri-1
47、式中:ri*代表mti处理后的信号,i代表脉冲数。
48、进一步的,step3中获得距离像非相参累积信号的步骤具体如下:
49、定义第i脉冲的距离像数据为:
50、x(i)=[x(i,1),x(i,2),...,x(i,j),...,x(i,nd)]
51、式中:x(i,j)代表第j距离单元幅值;nd代表距离单元数;
52、对距离像x以nt脉冲数为一帧进行非相干叠加,获得距离像非相参累积信号,过程表述为:
53、
54、式中:|·|代表绝对值运算;u(h)代表第h帧非相参累计后的信号;nt代表每帧中的脉冲数。
55、进一步的,step4具体步骤如下:
56、对于j距离单元,检测门限表述为:
57、
58、式中:nr代表参考单元格数量;pfa代表恒虚假概率;
59、根据自适应判断准则比较检测门限ηj与待检测单元u(h,j)的大小,获得目标所在距离单元序号;
60、对距离像所有距离单元应用自适应判断准则,获得第h帧检测到的目标距离r。
61、进一步的,自适应判断准则如下:
62、
63、式中:h1代表有目标假设;h0代表无目标假设。
64、进一步的,step5具体步骤如下:
65、定义接收天线阵元接收信号的导向向量a(θ),具体表达式为:
66、a(θ)=[1,e-jφ,...,e-j(k-1)φ]t,φ=(2πdsinθ)/λ
67、式中:θ代表来波方向;d代表接收阵元间距,d=λc/2;λc表示载波波长;
68、mvdr波束形成中的空域滤波器输出为:
69、y(j)=whx(j)
70、式中:w为空域滤波器的权值向量,w=[w1,w2,...,wk]t;x(j)为包含k个通道的目标距离检测结果信号;[·]h代表共轭转置运算;
71、输出平均功率p(θ)为:
72、p(θ)=e{|y(j)|2}=e{whx(j)xh(j)w}=whrw
73、式中:r=e{x(j)xh(j)}为自相关矩阵;e{·}为数学期望;
74、mvdr波束成形器的最优权向量可以表示为:
75、
76、将最优权值向量代入平均功率表达式中,得到平均功率为:
77、
78、在[-π,π]角度范围内改变a(θ)中的θ角得到pmvdr(θ)的变化曲线,对pmvdr(θ)曲线进行谱峰搜索,得到对应的目标方位角θ。
79、进一步的,step7中,判断虚假目标点对应的角度θ′1、确定虚假目标所属的往返传播路径时,具体判断方式如下:
80、
81、令雷达的角度探测范围是沿y轴正方向为0°、沿x轴负半轴到正半轴[-π,π]的角度范围进行探测,若θ′1>0,说明该信号沿φ11传播,所对应的镜像目标点为q11,反之则说明该回波所对应的镜像目标点为q22。
82、进一步的,step7具体步骤如下:
83、首先对虚假目标位置点集q按距离从小到大进行排列,令虚假目标点对应距离记为r′1,并判断虚假目标点对应的角度θ′1、确定虚假目标所属的往返传播路径;
84、解算估计真实目标位置点p′:
85、
86、再由p′反向估计对应的多径虚假目标点位置q′12、q′21、q′22、q′11,将其他初始坐标点位置由极坐标系转化笛卡尔坐标系qi=[r′isinθi′,r′icosθ′i],i=2,...,n,分别计算多径虚假目标位置点与其他初始位置点的距离误差:
87、
88、式中:||·||2表示欧几里得范数计算;
89、分别对距离误差与误差阈值进行比较,若距离误差小于门限值th,说明此时比较的初始定位点为双程有效虚假目标点,将其坐标位置加入有效虚假目标点集q′,之后对保留的初始定位点重复上述匹配过程,消除所有的无效虚假目标点。
90、与现有技术相比,本基于毫米波雷达的矿井t型巷道目标定位方法首先建立并分析简化t型巷道场景毫米波电磁传播路径,并建立对应的fmcw体制雷达回波模型;其次,利用mti、脉冲压缩、非相干叠加对雷达信号进行预处理,采用ca-cfar检测方法对进行目标距离提取,通过mvdr空域滤波方法估计目标方位角估计,结合距离和方位角信息解算虚假目标点集;最后通过对虚假目标点集进行匹配消除、获得有效虚假目标点集,利用先验场景信息对有效虚假目标点集进行坐标变换获得真实目标点集,完成定位流程。本基于毫米波雷达的矿井t型巷道目标定位方法具备以下优点:
91、1、可针对性地有效解决煤矿井下t型巷道非视距场景目标定位问题;
92、2、定位算法运算复杂度低,定位精度较高;
93、3、无效虚假目标匹配消除方法能够有效消除无用虚假目标干扰,提升定位精度;
94、4、可应用于矿井灾难救援、矿井无人驾驶等领域。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278153.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表