一种基于共轭涡旋光干涉的微小角位移测量系统
- 国知局
- 2024-08-22 14:21:47
本技术涉及光学传感测量领域,尤其涉及一种基于共轭涡旋光干涉的微小角位移测量系统。
背景技术:
1、基于涡旋光束的激光相干测量(laser interferometry based on vortexbeams,livb)技术在保留了相干测量固有优点,如非接触测量、高分辨率和宽动态范围的基础上整合了丰富的螺旋相位信息,同时,通过检测干涉强度、相位、频率等方式获得测量信息,提高了传统相干测量的准确性和鲁棒性,使livb技术广泛应用于生命科学、工程机械、材料科学、微电子技术等场景。进一步的,基于光纤涡旋光的相干调控测量技术,利用少模光纤激光器产生涡旋光并进行干涉传感,得益于涡旋光的特殊性质以及光纤作为传输介质的高效性和灵活性,使其具有一系列独特的优势。
2、目前,基于涡旋光相干调控的传感测量方法大多通过确定光斑中心位置和花瓣的特征点进行花瓣旋转角度的测量,然而光斑的中心位置较难确定,光斑形状也易受外界影响发生形变。同时,利用涡旋光束相干调控进行非接触位移检测大多使用空间光,这是因为相较于光纤,空间光的监测和调控相对容易,且光纤常用的传输波长为通信波长,在进行非接触式表面检测时会导致较高的吸收损耗。然而,光纤作为传输介质,具备灵活性、高效性和良好的兼容性,同时,非接触式测量可以克服光纤接触测量的一些固有缺陷,因此,基于全光纤涡旋光束相干调控进行非接触位移检测的应用潜力是巨大的。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种基于共轭涡旋光干涉的微小角位移测量系统,通过利用少模光纤激光器产生波长和拓扑荷数可调谐的涡旋光束,能够实现更广范围的角位移的测量;进一步的,生成花瓣状的干涉图案,通过计算该干涉图案进行旋转角度和旋转方向,得到待检测样品的角位移变化,无需确定光斑中心的位置,以避免光斑中心带来的误差,实现更加准确、有效的微小角位移测量。
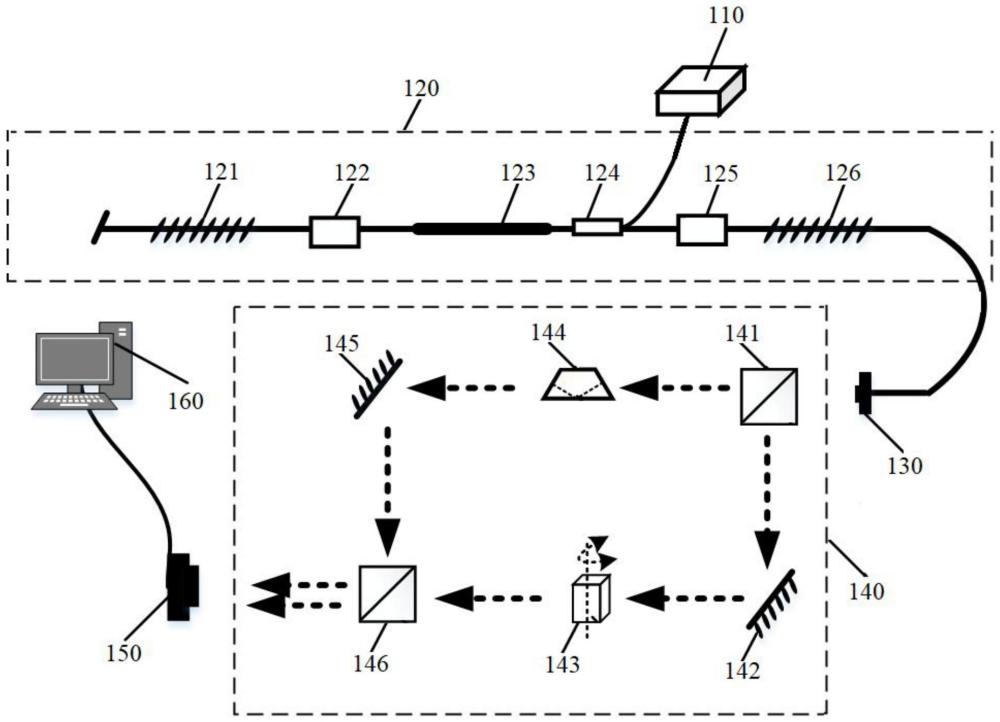
2、本技术提供了一种基于共轭涡旋光干涉的微小角位移测量系统,其特征在于,所述测量系统,包括:少模泵浦源110、少模光纤激光器120、准直器130、角位移测量单元140、ccd相机150以及计算单元160;
3、所述少模光纤激光器120用于利用所述少模泵浦源110产生波长和拓扑荷数可调谐的涡旋光束;
4、所述角位移测量单元140用于利用经过所述准直器130扩束后的所述涡旋光束检测待检测样品143的角位移,以生成花瓣状的干涉图案;
5、所述计算单元160用于计算所述ccd相机150采集到的所述干涉图案的旋转角度和旋转方向,并根据所述干涉图案的旋转角度和旋转方向,确定所述待检测样品的角位移。
6、进一步的,所述少模光纤激光器120通过依次连接以下光学组件构成:第一少模倾斜光栅121、第一偏振控制器122、少模掺铒光纤123、少模波分复用器124、第二偏振控制器125以及第二少模倾斜光栅126;
7、所述第二少模倾斜光栅126作为所述少模光纤激光器120的输出端与所述准直器130的输入端连接。
8、进一步的,所述少模泵浦源110设置于所述少模波分复用器124和所述第二偏振控制器125之间;
9、所述少模掺铒光纤123用于接收所述少模泵浦源110发出的泵浦光束产生受激幅射,并输出特定波长的幅射光束;
10、所述第一少模倾斜光栅121和所述第二少模倾斜光栅126形成所述少模光纤激光器120的谐振腔,用于对所述幅射光束提供光学正反馈,以产生波长和拓扑荷数可调谐的涡旋光束;
11、所述少模波分复用器124用于对所述泵浦光束和所述幅射光束进行和波和分波,以实现所述少模掺铒光纤123的双向信号传输;
12、所述第一偏振控制器122和所述第二偏振控制器125用于调节所述谐振腔内的损耗,以控制所述涡旋光束的波长、拓扑荷数和极性。
13、进一步的,所述第一少模倾斜光栅121与所述第二少模倾斜光栅126具有相同的光栅周期、倾斜角度和写制长度;所述第一少模倾斜光栅121的调制深度大于所述第二少模倾斜光栅126的调制深度,以使所述第二少模倾斜光栅126成为所述涡旋光束的输出端。
14、进一步的,所述角位移测量单元140包括:第一分束镜141、第一反射镜142、所述待检测样品143、dove透镜144、第二反射镜145以及第二分束镜146;
15、所述第一分束镜141作为所述角位移测量单元140的输入端与所述准直器130的输出端连接;
16、所述第一反射镜142设置于所述第一分束镜141的第一输出端和所述待检测样品143之间;
17、所述dove透镜144设置于所述第一分束镜141的第二输出端和所述第二反射镜145之间;
18、所述第二分束镜146的输入端与所述待检测样品143和所述第二反射镜145连接,所述第二分束镜146的输出端与所述ccd相机150连接。
19、进一步的,所述第一分束镜141用于将扩束后的所述涡旋光束分为具有相同拓朴荷数和极性的第一涡旋光束和第二涡旋光束;
20、所述第一反射镜142用于改变所述第一涡旋光束的传输方向,以使所述第一涡旋光束穿透所述待检测样品143,生成测量涡旋光束;
21、所述dove透镜144用于将所述第二涡旋光束的拓扑荷极性进行反转,以生成参考涡旋光束;
22、所述第二反射镜145用于改变所述参考涡旋光束的传输方向,以使所述参考涡旋光束反射至所述第二分束镜146;
23、所述第二分束镜146用于将所述测量涡旋光束和所述参考涡旋光束汇聚成一路,以使所述测量涡旋光束和所述参考涡旋光束发生同轴干涉,形成花瓣状的干涉图案。
24、进一步的,所述计算单元180在计算所述ccd相机150采集到的所述干涉图案的旋转角度和旋转方向时,具体用于:
25、对所述干涉图案进行二值化处理后,利用质心算法,确定所述干涉图案中各花瓣的特征点,并通过建立极坐标,得到所述特征点的极坐标位置;
26、以对角线方式将处于同一阶次的所述特征点连接,得到所述干涉图案的特征点连接线;
27、获取所述待检测样品143未产生角位移时的初始干涉图案,并确定所述初始干涉图案的特征点连接线;
28、根据所述干涉图案的特征点连接线和所述初始干涉图案的特征点连接线,确定所述干涉图案的旋转角度和旋转方向。
29、进一步的,所述角位移包括:旋转角度和旋转方向;所述计算单元180在根据所述干涉图案的旋转角度和旋转方向,确定所述待检测样品143的角位移时,具体用于:
30、根据干涉图案的旋转角度与待检测样品的角位移变化的关系曲线,确定所述待检测样品143的旋转角度;
31、根据所述干涉图案的旋转方向确定所述待检测样品143的旋转方向。
32、进一步的,所述待检测样品143固定在可连续调节角度的旋转平移台上,以使所述待检测样品143产生连续的或者间断的角位移变化;
33、当所述待检测样品143产生连续的角位移变化时,根据所述角位移的变化率设置所述ccd相机150的采集频率。
34、进一步的,所述计算单元(180)通过以下方式,构建所述干涉图案的旋转角度与待检测样品的角位移变化的关系曲线:
35、获取所述待检测样品143在预先设定的各角位移下的目标干涉图案,并得到所述目标干涉图案的特征点连接线;
36、根据所述目标干涉图案的特征点连接线和所述初始干涉图案的特征点连接线,确定所述目标干涉图案的旋转角度和旋转方向;
37、基于所述预先设定的各角位移的旋转角度和所述目标干涉图案的旋转角度,构建所述干涉图案的旋转角度与待检测样品的角位移变化的关系曲线。
38、本技术提供的基于共轭涡旋光干涉的微小角位移测量系统,通过利用少模光纤激光器产生波长和拓扑荷数可调谐的涡旋光束,能够实现更广范围的角位移的测量;进一步的,生成花瓣状的干涉图案,通过计算该干涉图案进行旋转角度和旋转方向,得到待检测样品的角位移变化,无需确定光斑中心的位置,以避免光斑中心带来的误差,实现更加准确、有效的微小角位移测量
本文地址:https://www.jishuxx.com/zhuanli/20240822/278331.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表