一种隧道用UWB基站定位方法、系统、存储介质及计算机与流程
- 国知局
- 2024-08-30 14:25:11
本发明涉及隧道通信,更具体地说,它涉及一种隧道用uwb基站定位方法、系统、存储介质及计算机。
背景技术:
1、在2020年,国家煤监局出台文件,要求煤矿井下人员精确定位系统最大静态定位误差应不大于0.3m。在目前现有的主流技术中,只有使用uwb技术部署的室内定位系统可以达到这个要求。
2、在目前的隧道、矿井定位场景中,一般只需要知道具体下井人员在矿井中哪一段即可。目前大部分的uwb定位系统方案都是在需要定位的隧道长度首尾各部署一个基站来覆盖该段。通常情况下,每100m的直线就要部署两个基站进行定位。这样在几公里的矿井隧道里部署定位基站的数量就比较多,导致安装基站的施工难度大幅提高,基站铺设成本也随之增加,也对定位系统的管理带来了更大的负担。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种隧道用uwb基站定位方法、系统、计算机及存储介质,以克服上述背景技术所存在的技术问题。
2、本发明的上述技术目的是通过以下技术方案得以实现的:一种隧道用uwb基站定位方法,应用于uwb定位基站,所述定位基站包括:通信模块a、第一定向平板天线、通信模块b、第二定向平板天线、时钟发生器以及主控制器;
3、所述通信模块a与第一定向平板天线通信连接,所述通信模块b与第二定向平板天线通信连接;
4、所述通信模块a和通信模块b均与主控制器通信连接;所述通信模块a和通信模块b均与时钟发生器通信连接;
5、所述方法包括:
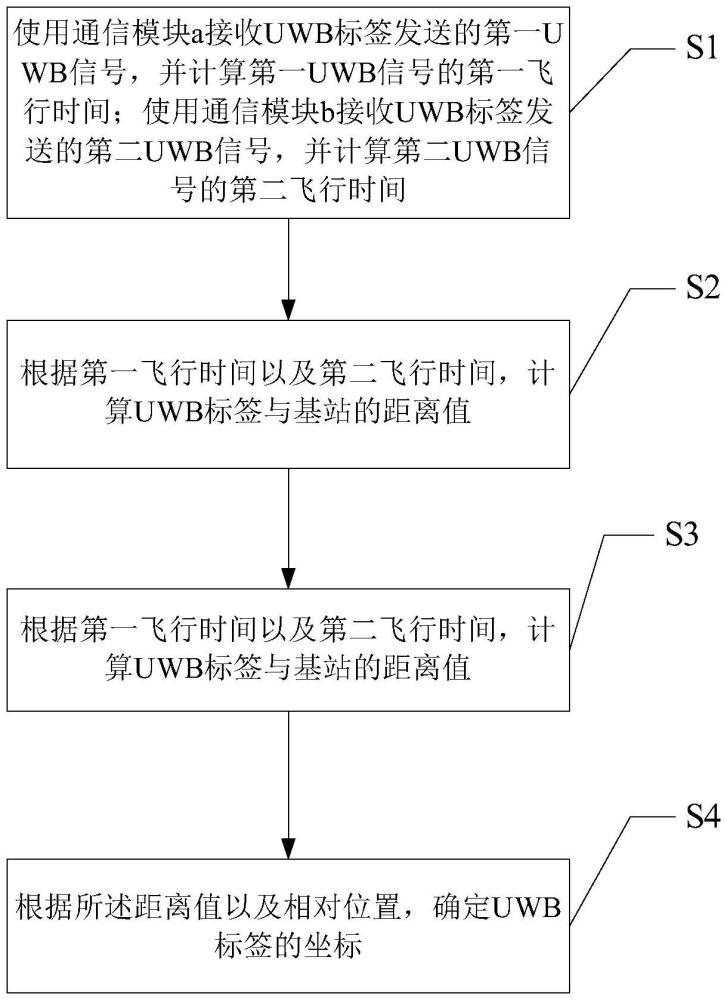
6、s1、使用通信模块a接收uwb标签发送的第一uwb信号,并计算第一uwb信号的第一飞行时间;使用通信模块b接收uwb标签发送的第二uwb信号,并计算第二uwb信号的第二飞行时间;
7、s2、根据所述第一飞行时间以及第二飞行时间,计算uwb标签与基站的距离值;
8、s3、根据所述第一uwb信号的第一信号强度以及第二uwb信号的第二信号强度,判断标签与基站的相对位置;
9、s4、根据所述距离值以及相对位置,确定uwb标签的坐标。
10、可选的,所述使用通信模块a接收uwb标签发送的第一uwb信号,并计算第一uwb信号的第一飞行时间,包括:
11、使用通信模块a接收uwb标签发射的第一测距信号,并获取所述第一测距信号的第一发射时间t0,以及第一测距信号到达所述通信模块a的第一接收时间t1;
12、使用通信模块a向所述uwb标签发射第二测距信号,并获取所述第二测距信号的第二发射时间t2,以及第二测距信号到达uwb标签的第二接收时间t3;
13、使用通信模块a接收uwb标签发射的第三测距信号,并获取所述第三测距信号的第三发射时间t4以及第三测距信号到达通信模块a的第三接收时间t5;
14、利用所述第一发射时间t0、第一接收时间t1、第二发射时间t2、第二接收时间t3、第三发射时间t4以及第三接收时间t5,计算第一飞行时间tprop1:
15、
16、其中,ta1=t3-t0,tb1=t5-t2,tc1=t2-t1,td1=t4-t3。
17、可选的,所述使用通信模块b接收uwb标签发送的第二uwb信号,并计算第二uwb信号的第二飞行时间,包括:
18、使用通信模块b接收uwb标签发射的第四测距信号,并获取所述第四测距信号的第四发射时间t6,以及第四测距信号到达所述通信模块b的第四接收时间t7;
19、在经过第一时间间隔后,使用通信模块b向所述uwb标签发射第五测距信号,并获取所述第五测距信号的第五发射时间t8,以及第五测距信号到达uwb标签的第五接收时间t9;
20、使用通信模块b接收uwb标签发射的第六测距信号,并获取所述第六测距信号的第六发射时间t10以及第六测距信号到达通信模块a的第六接收时间t11;
21、利用所述第四发射时间t6、第四接收时间t7、第五发射时间t8、第五接收时间t9、第六发射时间t10以及第六接收时间t11,计算第二飞行时间tprop2:
22、
23、其中,ta2=t9-t6,tb2=t11-t8,tc2=t8-t7,td2=t10-t9。
24、可选的,所述根据所述第一飞行时间以及第二飞行时间,判断uwb标签与基站的距离值,包括:
25、根据第一飞行时间tprop1,计算uwb标签与通信模块a之间的第一距离值d1,包括:d1=c*tprop1;
26、根据第二飞行时间tprop2,计算uwb标签与通信模块b之间的第二距离值d2,包括:d2=c*tprop2;
27、其中,c=299792458m/s;
28、当d1>d2时,则uwb标签靠近通信模块b,此时定位基站输出uwb标签的距离值为d2;
29、当d1<d2时,则uwb标签靠近通信模块a,此时定位基站输出uwb标签的距离值为d1。
30、可选的,所述根据所述第一uwb信号的第一信号强度以及第二uwb信号的第二信号强度,判断标签与基站的相对位置,包括:
31、获取通信模块a接收到的第三测距信号的第一信号强度rpa;获取通信模块b接收到的第六测距信号的第二信号强度rpb;
32、根据所述第一接收时间t1以及第四接收时间t7,计算第一时间间隔δt1;根据第三接收时间t5以及第六接收时间t11,计算第二时间间隔δt2;
33、判断所述第一时间间隔δt1或者第二时间间隔δt2是否大于预设的间隔阈值,若否,则比较所述第一信号强度rpa和第二信号强度rpb的大小,包括:
34、计算第一信号强度rpa和第二信号强度rpb的差值;
35、在rpa-rpb>6的情况下,所述uwb标签更靠近通信模块a;
36、在rpa-rpb<-6的情况下,所述uwb标签更靠近通信模块b;
37、在-6≤rpa-rpb≤6的情况下,则利用所述第一时间间隔δt1和第二时间间隔δt2继续判断,包括:
38、在δt1<0且δt2<0的情况下,所述uwb标签更靠近通信模块a;
39、在δt1>0且δt2>0的情况下,所述uwb标签更靠近通信模块b;
40、在δt1=0且δt2=0的情况下,发出提示信息;
41、在δt1<0,δt2>0或者在δt1>0且δt2<0的情况下,则发出错误警报。
42、可选的,所述根据所述第一接收时间t1以及第四接收时间t7,计算第一时间间隔δt1,包括:
43、δt1=t7-t1+δt;
44、其中,δt为预设的校准偏差值。
45、可选的,所述根据第三接收时间t5以及第六接收时间t11,计算第二时间间隔δt2,包括:
46、δt2=t11-t5+δt;
47、其中,δt为预设的校准偏差值。
48、一种隧道用uwb基站定位系统,包括:时间统计模块:用于使用通信模块a接收uwb标签发送的第一uwb信号,并计算第一uwb信号的第一飞行时间;使用通信模块b接收uwb标签发送的第二uwb信号,并计算第二uwb信号的第二飞行时间;
49、距离计算模块:用于根据所述第一飞行时间以及第二飞行时间,计算uwb标签与基站的距离值;
50、强度对比模块:用于根据所述第一uwb信号的第一信号强度以及第二uwb信号的第二信号强度,判断标签与基站的相对位置;
51、坐标计算模块:用于根据所述距离值以及相对位置,确定uwb标签的坐标。
52、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的方法的步骤。
53、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述所述的方法的步骤。
54、综上所述,本发明具有以下有益效果:采用双天线uwb基站,基站天线采用基站天线采用高增益平板天线朝向左右两端,装配时只需要在中间布置该基站即可覆盖隧道并定位,可以在满足定位精度要求的前提下有效减少基站的部署数量,减少现场施工难度,提高管理的便携性。
本文地址:https://www.jishuxx.com/zhuanli/20240830/281900.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表