一种基于多向判决反馈的OTFS水声通信信道均衡方法
- 国知局
- 2024-08-30 14:27:35
本发明属于水声通信(underwater acoustic communication,uac)领域,更具体地,涉及基于正交时频空调制(orthogonal time frequency space,otfs)水声通信系统,通过联合不同方向的判决反馈均衡器,减轻误差传播,来提升通信系统均衡性能的设计方法。
背景技术:
1、海洋蕴藏着丰富的生物资源、矿产资源、药物资源、空间资源、海水资源和多种能源,是人类解决资源短缺、拓展生存发展空间的必争之地。实现海洋观测以及资源的勘探和开发,不仅能扩展生存发展的空间,还有助于解决资源短缺问题。随着探索海洋的需求不断增加,建立一个海洋综合立体观测体系已经成为海洋科技创新的一个重要方向。为满足海洋节点间及其他平台的中远距离通信需求,提升水声通信系统的可靠性已经变得至关重要。
2、声波在海水中传播的传播速度较慢,使得经历不同路径的信息到达接收端的时间差异较大,因此,水声信道的时延扩展比较大,码间串扰范围通常高达几十至上百个符号。此外,节点运动和水面波浪起伏也使得水声信道的多普勒效应比无线信道中高出4~5个数量级。总的来说,水声信道具有复杂的时-空-频变特性和时空不确定性,严重制约移动水声通信的发展。
3、近二十年来,为实现高速率可靠水声通信,研究人员先后提出了正交频分复用(orthogonal frequency division multiplexing,ofdm)和单载波频域均衡水声通信方法。但ofdm系统在快速时变信道下,子载波间的正交性被破坏,导致存在严重的载波间干扰,性能快速下降。单载波频域均衡系统的性能依赖信道估计精度,对于快时变信道,利用导频估计的信道容易出现偏差,导致其在快速时变信道下的性能较差。
4、近年来,研究人员在无线移动通信领域针对高速移动场景提出了正交时频空调制技术。otfs利用时变信道在时延-多普勒域内参数近似不变的特点,在时延-多普勒域内进行数据传输,可有效提高系统在移动信道下的性能。大量结果表明,otfs具有比ofdm更好的性能。虽然在时延-多普勒域中的信道可以近似视为时不变的,但符号间干扰仍然存在。对于具有长时延扩展和大多普勒效应的水声信道来说,otfs调制中符号间干扰范围是二维矩阵,导致接收复杂度过高,不利于在计算资源受限的水下节点上使用。
5、针对otfs水声通信系统,本发明设计了一种基于多向结构的自适应判决反馈均衡器(decision feedback equalization,dfe),利用不同方向均衡器的判决错误在不同的方向进行传播,呈现出不同的模式和位置,其均衡结果之间的低相关性,通过组合多个方向均衡器的输出,获得多向分级增益并减轻误差传播,实现更好的符号检测性能。
技术实现思路
1、本发明的目的是提升水声otfs系统的均衡性能,考虑到otfs系统二维干扰的特性,在自适应判决反馈均衡器的基础上,通过组合多个自适应判决反馈均衡器的结果,提供多向增益,减轻错误传播。所提出的均衡器不需要额外的信道估计,并且能够在较低的复杂度与较好的性能之间取得很好的权衡。
2、为了解决上述技术问题,本发明采用的技术方案如下:
3、一种基于多向结构自适应多通道判决反馈均衡器的设计方法,首先,对发送信号进行otfs调制,其次,调制信号经过水声信道,获得接收信号,第三,对接收信号进行otfs解调,接下来,通过多向判决反馈均衡器对解调信号进行均衡,最后,对均衡信息进行解码,恢复信息比特。对于长时延、大多普勒、时变性强的水声信道,多向判决反馈均衡器通过将多个不同方向的判决反馈均衡器相结合来,使均衡器出现的判决错误在不同的方向进行传播,呈现出不同的模式和位置,利用不同方向的滤波器的均衡结果之间的低相关性,通过组合多个方向均衡器的输出,加快均衡误差的收敛,提供多向分集增益并减轻误差传播,实现更好的符号检测性能,提升通信系统性能。本发明所提出的多向判决反馈均衡器能够在均衡性能和均衡复杂度取得合适的平衡,且不需要信道估计。所述的设计方法包括以下步骤:
4、第一步:发射端,对发送信号进行otfs调制,具体如下:
5、1.1)对于采用低密度奇偶校验码(low density parity check codes,ldpc)编码的水声otfs系统,其具有m个子载波和n个时隙,每个子载波带宽为δf,每个符号的持续时间为t。信息比特序列a通过码率rc为的ldpc编码,交织得到信息比特c,qam调制后获得m*n个调制符号。这些符号经过串并转换,获得二维时延-多普勒域发送信号矩阵上标dd表示当前信号为时延-多普勒域信号。矩阵xdd中的元素xdd(k,l)为矩阵xdd第k行第j列的元素。
6、1.2)将时延-多普勒域发送信号矩阵xdd,采用逆辛傅里叶变换(inversesymplectic finite fourier trans,isfft),转换为大小为n×m二维时间-频率域(time-frequency,tf)发送信号矩阵xtf,上标tf表示当前信号为时间-频率域信号。矩阵xtf中的元素xtf(n,m)为矩阵xtf第n行第m列的元素,xtf(n,m)可表示为:
7、
8、1.3)将步骤1.2)得到的时间-频率域发送信号矩阵xtf经过海森伯格变换得到时域发送信号s(t),可表示为:
9、
10、其中,gtx(t)为脉冲整形函数,此处,使用矩阵波作为脉冲整形函数。t表示符号的发送时刻,t表示每个符号的持续时间。公式(2)可以看作将频域信号映射为时域信号的ofdm调制的一般形式。因此,otfs调制可以视为isfft预编码器与传统ofdm调制器的串联,其中ofdm调制器由ifft模块与脉冲整形函数组成。
11、第二步:调制信号经过水声信道,获得接收信号,具体如下:
12、2.1)时延-多普勒域的时变衰落水声信道h(τ,v),τ和v分别表示该信道的时延集合和多普勒集合,h(τ,v)可以具体表示为:
13、
14、其中,p为多径数;hi、τi和vi分别代表第i条路径的信道衰落,时延和多普勒频移;δ()为狄拉克函数。
15、第i条路径的时延和多普勒频移的定义分别为:
16、
17、其中,li和ki为整数,分别表示与时延τi和多普勒频移vi相关的抽头系数;代表分数多普勒,表示距离最近的多普勒抽头ki的分数移位。在宽带水声通信系统中,m和n通常比较大,分数时延和分数多普勒可以忽略不计,时延和多普勒通常可以视为整数。
18、2.2)将时域发送信号s(t)添加循环前缀(循环前缀的长度ncp应大于等于信道的最大时延lmax)后,通过时变衰落水声信道,获得时域接收信号r(t),可表示为
19、r(t)=∫∫h(τ,v)s(t-τ)ej2πv(t-τ)dτdv+ω(t) (5)
20、其中,ω(t)为均值为0、方差为σ2的加性高斯白噪声;s(t-τ)为时域发送信号s(t)经过时延τ后的信号。
21、第三步:接收信号进行otfs解调,具体如下:
22、3.1)接收端采用多天线接收,天线数为q,不同天线得到的时域接收信号不同。对于第q个接收天线,其得到时域接收信号为rq(t),去除循环前缀,经过魏格纳变换,将时域接收信号转换到rq(t)时间-频率域接收信号上标tf表示当前信号为时间-频率域信号,下标q表示该信号为第q个接收天线接收。矩阵中的元素为矩阵第n行第m列的元素,可表示为:
23、
24、式中,grx(t)表示同样采用矩形波作为脉冲整形函数;(·)*表示取共轭操作;rq(t')表示t'时刻的第q个接收天线的时域接收信号。
25、3.2)对时间-频率域接收信号进行对应的辛傅里叶变换,可获得时延-多普勒域的接收信号上标dd表示当前信号为时延-多普勒域信号,下标q表示该信号为第q个接收天线接收。矩阵中的元素为矩阵第k行第l列的元素,可表示为:
26、
27、以上,完成了otfs水声通信系统的基本流程,发送信息比特依次经由ldpc编码、交织、qam调制、isfft、发射脉冲整形、海森伯格变换、加循环前缀、通过水声信道、多天线接收、去除循环前缀、魏格纳变换、接收脉冲整形、sfft可获得时延-多普勒域的接收信号,进一步进行信道均衡和解码,以恢复发送的符号信息。
28、第四步:通过多向判决反馈均衡器对解调信号进行均衡,具体如下:
29、二维判决反馈均衡器有两类滤波器组成,分别是q个前馈滤波器w1,…,wq和一个反馈滤波器u,q为步骤3.1)所述的接收端天线数。
30、4.1)基于步骤3.2)得到时延多普勒域接收信号,在导频部分,均衡器处于训练模式,此时使用导频符号训练滤波器系数,滤波器的输出为时延-多普勒域信号的均衡结果,可表示为:
31、
32、其中,⊙表示两个矩阵对应元素相乘并求和;(·)h表示共轭转置操作;为第q个前馈滤波器的滤波器系数矩阵;为反馈滤波器的滤波器系数矩阵;为第q个前馈滤波器的输入矩阵;为反馈滤波器的输入矩阵。其中,l1和k1分别表示由未来接收信号引起的符号间干扰和多普勒间干扰的长度,l2和k2分别表示由过去接收信号引起的符号间干扰和多普勒间干扰的长度。
33、滤波器的输入具体由下式给出:
34、
35、
36、其中,[·]表示取模操作,和为第q处接收天线接收到的时延-多普勒域信号,为反馈信号。
37、均衡器的输出简化为:
38、
39、其中,wq,zq,u和d分别为矩阵wq,zq,u和d的向量化形式。
40、均衡器符号估计误差由下式给出:
41、
42、其中,在训练模式下,d(k,l)的值为导频信号的值。
43、4.2)基于步骤4.1)计算得到的均衡器的符号估计误差,将均衡器结构与自适应算法相结合来实现时变信道下的信道跟踪,更新滤波器系数。通常,采用最小均方误差(normalized least mean squares,nlms)或改进的比例归一化最小均方误差(improvedproportionate normalized least mean squares,ipnlms)算法来更新滤波器系数。
44、具体而言,前馈滤波器的初始系数和反馈滤波器的初始系数分别为wq和u,采用ipnlms自适应算法,滤波器的权重更新为:
45、
46、
47、其中,和分别代表前馈滤波器和反馈滤波器更新后的系数;αw和αu分别代表前馈滤波器和反馈滤波器的更新步长;δw和δu分别代表前馈滤波器和反馈滤波器的正则化参数,都是较小的正数;和gu分别代表前馈滤波器和反馈滤波器的对角元素矩阵,其第i个对角元素为:
48、
49、
50、其中,wq(i)和u(i)分别为前馈滤波器和反馈滤波器系数向量的第i个元素;lw和lu分别为前馈滤波器和反馈滤波器的尺寸大小;-1≤α≤1决定了滤波器的稀疏度。对于ipnlms算法,均衡器的性能主要受到αw,αu和α的影响,对于其他参数并不敏感。
51、4.3)在数据部分,均衡器进入决策导向模式。此时根据步骤4.2)公式(13)和(14)更新的滤波器系数,对数据部分的接收信号进行均衡,均衡结果的计算过程与公式(8)相同。此时对于均衡器的符号估计误差与公式(12)相同,d(k,l)的取值变为为均衡结果的硬判决结果。同时,随着均衡过程的进行,根据数据部分的均衡误差采用自适应算法进一步更新滤波器参数。此时,均衡器的均衡结果为
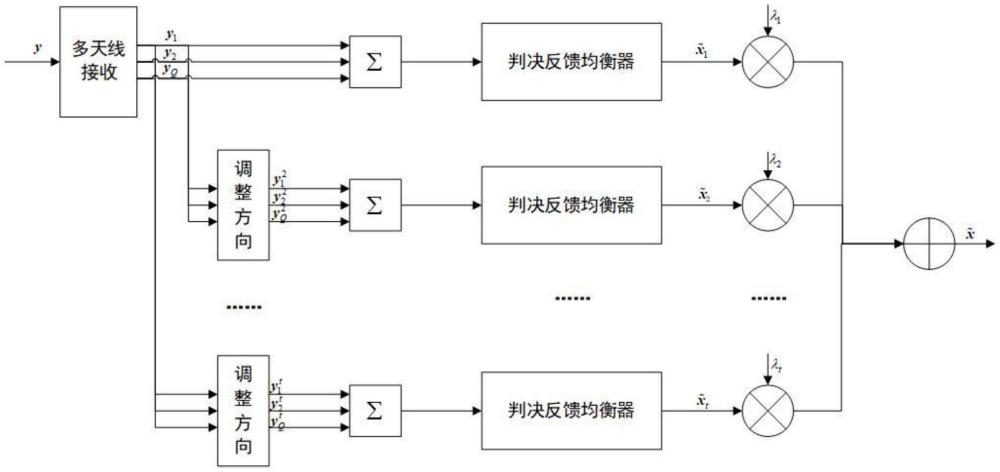
52、4.4)步骤4.1)-4.3)采用的二维判决反馈均衡器属于符号级均衡器,对于二维otfs发送信号矩阵,其中包括m*n个调制符号,需要按照一定的顺序逐个对符号进行均衡才能组成均衡结果对于在otfs系统中,时延-多普勒域的发送与接收信号都是矩阵形式,也就是二维的,分别为时延维度和多普勒维度,因此按照不同的维度可以衍生出不同的顺序。因此,规定按照对符号进行均衡的顺序称之为方向。例如,先按照时延维度正向再按照多普勒维度正向顺序进行均衡定义为方向一;先按照时延维度反向再按照多普勒维度正向顺序进行均衡定义为方向二;先按照多普勒维度正向再按照时延维度正向顺序进行均衡定义为方向三。以此类推,可以获得的不同方向数定义为t。
53、对于步骤4.3)得到均衡结果其是按照方向一的顺序进行均衡,因此将其记为为提高均衡器的均衡准确性,需部署多个二维判决反馈均衡器,均衡器的结构相同,不同之处仅为符号均衡顺序,即方向不同,将其按照不同权重因子组合,即组成了多向判决反馈均衡器。假定有t个不同方向均衡器,将其输出分别定义为并按照不同权重因子组合获得多向均衡器的输出下标m表示其为多向判决反馈均衡器的输出,可表示为:
54、
55、其中,λ1,λ2,…,λt分别为对应于t个不同方向的均衡器的权重因子,其应该满足:
56、λ1+λ2+…+λt=1 (18)
57、所采用的t个均衡方向具体被设计为:对于方向一,先按照时延维度正向再按照多普勒维度正向顺序进行均衡,对于方向二,先按照时延维度反向再按照多普勒维度正向顺序进行均衡;对于方向三,先按照多普勒维度正向再按照时延维度正向顺序进行均衡;对于方向四,先按照多普勒维度反向再按照时延维度正向顺序进行均衡;对于方向五,先按照时延维度正向再按照多普勒维度反向顺序进行均衡;对于方向六,先按照时延维度反向再按照多普勒维度反向顺序进行均衡;对于方向七,先按照多普勒维度正向再按照时延维度反向顺序进行均衡;对于方向八,先按照多普勒维度反向再按照时延维度反向顺序进行均衡
58、4.5)对于步骤4.4)中的权重因子组合的取值,以双向判决反馈均衡器为例,即t=2情况,给出最佳权重因子组合的推导,具体如下:
59、为获得最佳权重因子,要使得多向判决反馈均衡器的输出的均方误差(meansquare error,mse)最小,转化为优化问题:
60、
61、其中,λ1和λ2分别为两个不同方向均衡器的均衡结果和对应的权重因子,和分别为使得均方误差最小的最佳权重因子。
62、将均衡结果和视为符号真实值x和均衡误差之和,可表示为:
63、
64、
65、其中,μ1和μ2分别为两个不同方向均衡器的均衡结果和的系数,η1和η2分别为两个不同方向均衡器的均衡结果和的残余误差。将式(20)和式(21)代入式(17),得到
66、
67、其中,η=λ1η1+λ2η2,其主要由残余的码间干扰和信道噪声组成,因此其独立于x。因此,的均方误差可以改写为:
68、
69、为了使的均方误差最小,权重因子应该满足:
70、λ1μ1+λ2μ2=1 (24)
71、代入式(23),对其相对于λ1(或λ2)的一阶导数置为0,即:
72、
73、可得式(19)的解:
74、
75、
76、其中,和分别为均衡结果和的方差;ρ1,2为和的相关系数;μ1和μ2分别为两个不同方向均衡器的均衡结果和的系数。
77、根据式(26)和式(27),对于qam调制符号,通常μ1≈μ2≈1。对于不同方向的均衡器的均衡结果,其具有近似相同的方差,即因此对于双向均衡结构,其最佳权重因子可以简化为λ1≈λ2≈1/2。
78、与双向判决反馈均衡器同理,对于多向判决反馈均衡器,假定t个不同方向的均衡器的均衡结果具有近似相同的方差,即另外,假定任意两个不同方向的均衡器之间的相关系数近似相等,即ρ1,2≈…≈ρ1,t≈…≈ρt-1,t,因此,可以得到多向均衡结果的最佳权重因子,可表示为:
79、λ1≈λ2≈…λt≈1/t (28)
80、因此,最佳权重组合大约收敛到等权重,对于实际应用中,将权重因子组合设置为等权重是有效且实用的选择,以提高系统性能。
81、第五步:对均衡信息进行解码,恢复信息比特,具体如下:
82、根据步骤4.4)得到的均衡器输出结果计算得到的均衡器的外部似然比经过解交织获得作为ldpc解码器的先验信息。如此,对于ldpc解码器,选择对数域和积算法进行译码,获得译码后的比特信息此时的译码结果即为在接收端恢复的发送信息,至此,完成对于接收信号的均衡和译码,实现水下可靠信息传输。
83、本发明提出了一种多向判决反馈均衡器,通过将多个不同方向的判决反馈均衡器相结合来,使均衡器出现的判决错误在不同的方向进行传播,呈现出不同的模式和位置,利用不同方向的滤波器的均衡结果之间的低相关性,通过组合多个方向均衡器的输出,加快均衡误差的收敛,提供多向分集增益并减轻误差传播,实现更好的符号检测性能。所提出的多向判决反馈均衡器能够在均衡性能和均衡复杂度取得合适的平衡,且不需要信道估计。
84、本发明的有益效果是:
85、(1)对于长时延,大多普勒,时变性强的水声信道,按照不同权重因子组合多个不同方向的均衡器,组成了多向判决反馈均衡器,该均衡器能够有效利用多向分级增益,并减轻误差传播,提升符号检测性能,因此其不仅可以实现更可靠的水下信息传输,还能够及时更新信道的变化,提升通信系统性能。
86、(2)此外,由于多向判决反馈均衡器属于符号级均衡方法,其复杂度与调制符号数m*n和滤波器大小线性相关。因此,其计算复杂度会低于其他均衡算法,而低计算复杂度也更适用于计算资源有限的水下节点的实际部署。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表