一种拖拉机用电液制动系统的制作方法
- 国知局
- 2024-08-30 14:40:27
本发明涉及电液制动系统,尤其涉及一种拖拉机用电液制动系统。
背景技术:
1、随着农业现代化的推广,机械的现代化作为发展重点,引起了越来越多人的重视。
2、其中,拖拉机在实现无人化控制方式上,做了很多探索尝试,无人化的突出优势不仅仅可以实现全天候、全疆域、全时间的机械作业,更多的是人类智慧在机械发展发面的突出表现,节省了人力真正体现了现代管理方式的升级。
3、无人驾驶可实现从出库、运输、作业、回场各个阶段的作业,同时兼顾了有人驾驶与无人驾驶的权限设置,让整机操作适应性更广泛。
4、针对这一需求,目前缺乏能够同时兼顾有人驾驶和无人驾驶两种模式的制动系统,故而现有的制动系统不能同时满足有人和无人化控制方式的需求。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种应用于拖拉机中,并能够兼顾有人驾驶和无人驾驶两种模式的制动系统。
2、为了实现上述目的,本发明的技术方案如下:一种拖拉机用电液制动系统,包括制动器终端组件、脚制动阀组、电控制动阀组、梭阀组件、压力油源和油壶,所述电控制动阀组与压力油源和所述梭阀组件组成电控制动油路,所述脚制动阀组与油壶和所述梭阀组件组成脚制动油路,所述制动器终端组件与所述电控制动油路连通,所述脚制动油路与所述电控制动油路通过所述梭阀组件连通;
3、当需要人为制动时,开启所述脚制动阀组并关闭所述电控制动阀组,油壶内部的压力油经过脚制动油路进入制动器终端组件中,制动器终端组件开始制动;
4、当需要电控制动时,关闭所述脚制动阀组并开启所述电控制动阀组,压力油源内部的压力油经过所述电控制动油路进入制动器终端组件中,制动器终端组件开始制动。
5、本发明的有益效果是:通过分别设置脚制动阀组与电控制动阀组,两者对制动器终端组件分别进行人为控制和电动控制,从而实现了制动器终端组件人为模式和电控模式的制动。
6、在上述技术方案的基础上,本发明还可以做如下改进。
7、进一步,所述脚制动阀组包括左脚制动阀和右脚制动阀,所述左脚制动阀进油口与所述油壶的出油口连通,所述左脚制动阀的出油口与所述梭阀组件的进油口连通,所述右脚制动阀的进油口与所述油壶的出油口连通,所述右脚制动阀的出油口与所述梭阀组件的进油口连通。
8、上述技术方案通过将脚制动阀组分为左脚制动阀和右脚制动阀,从而在人为制动时,能够根据使用者的左右脚分别进行制动。
9、进一步,所述电控制动阀组包括左电控阀和右电控阀,所述左电控阀和右电控阀均为两位三通阀,所述左电控阀进油口与所述压力油源连通,所述右电控阀进油口与所述压力油源出油口连通,所述左电控阀的两个出油口分别与所述梭阀组件的进油口和压力油源的进油口连通,所述右电控阀的两个出油口分别与所述梭阀组件的进油口和压力油源的进油口连通。
10、上述技术方案通过将电控制动阀组分别设置左电控阀和右电控阀,从而在电控制动时,能够根据实际制动需要分别对左脚制动器和右脚制动器进行制动。
11、进一步,所述梭阀组件包括第一梭阀和第二梭阀,所述第一梭阀和第二梭阀分别设有两个进油口,所述第一梭阀的两个进油口分别与所述左脚制动阀的出油口和左电控阀的出油口连通,所述第二梭阀的两个进油口分别与所述右脚制动阀的出油口和右电控阀的出油口连通,所述第一梭阀和第二梭阀的出油口分别与制动器终端组件连通。
12、上述技术方案针对通过分别设置第一梭阀和第二梭阀,并利用两者将脚制动油路和电控制动油路连通,从而实现脚制动油路和电控制动油路的切换。
13、进一步,所述制动器终端组件包括左脚制动器和右脚制动器,所述左脚制动器与所述第一梭阀的出油口连通,所述右脚制动器与所述第二梭阀的出油口连通。
14、上述技术方案通过设置左脚制动器和右脚制动器,从而实现对制动系统不同侧的分别独立制动,以提高制动性能。
15、进一步,所述右电控阀的进油口与所述左电控阀进油口和压力油源出油口之间的管路连通,所述左电控阀的出油口与右电控阀出油口和压力油源进油口之间的管路连通。
16、上述技术方案通过将左电控阀和右电控阀进行控制,并利用其进行油路控制以达到电控制动的目的。
17、进一步,所述压力油源包括油箱和油泵,所述油泵的进油口与所述油箱的出油连通,所述油泵的出油口分别与所述左电控阀和右电控阀的进油口连通。
18、上述技术方案通过设置油箱和油泵,并利用油泵为油箱内部的压力油提供动力,使其能够建立起压力,以在油路内部循环运动。
19、进一步,还包括建压油路,所述建压油路包括背压阀,所述背压阀的进油口和出油口分别与所述压力油源的出油口和进油口连通。
20、上述技术方案通过设置建压油路,在电控制动阀组不带电时,压力油源内部的油液能够在建压油路中循环,从而建立压力。
21、进一步,所述背压阀的进油口与所述左电控阀进油口和压力油源出油口之间的管路连通,所述背压阀的出油口与所述右电控阀出油口和压力油源进油口之间的管路连通。
22、上述技术方案通过设置背压阀,在不进行制动操作的初始状态时,压力油源内部的压力油通过背压阀的单向开合,从而实现压力油源内部的压力油在不进行制动操作时仍旧进行单向循环。
23、本发明的目的之二在于提供一种兼顾人为控制制动和电动控制制动两种模式的拖拉机。
24、为了实现上述目的,本发明的技术方案如下:一种拖拉机,包括一种拖拉机用电液制动系统。
25、上述技术方案通过将可以同时兼顾人为控制模式和电动控制模式的电液制动系统装配在拖拉机中,从而使得拖拉机能够根据不同的工况进行人为制动或者无人电控制动。
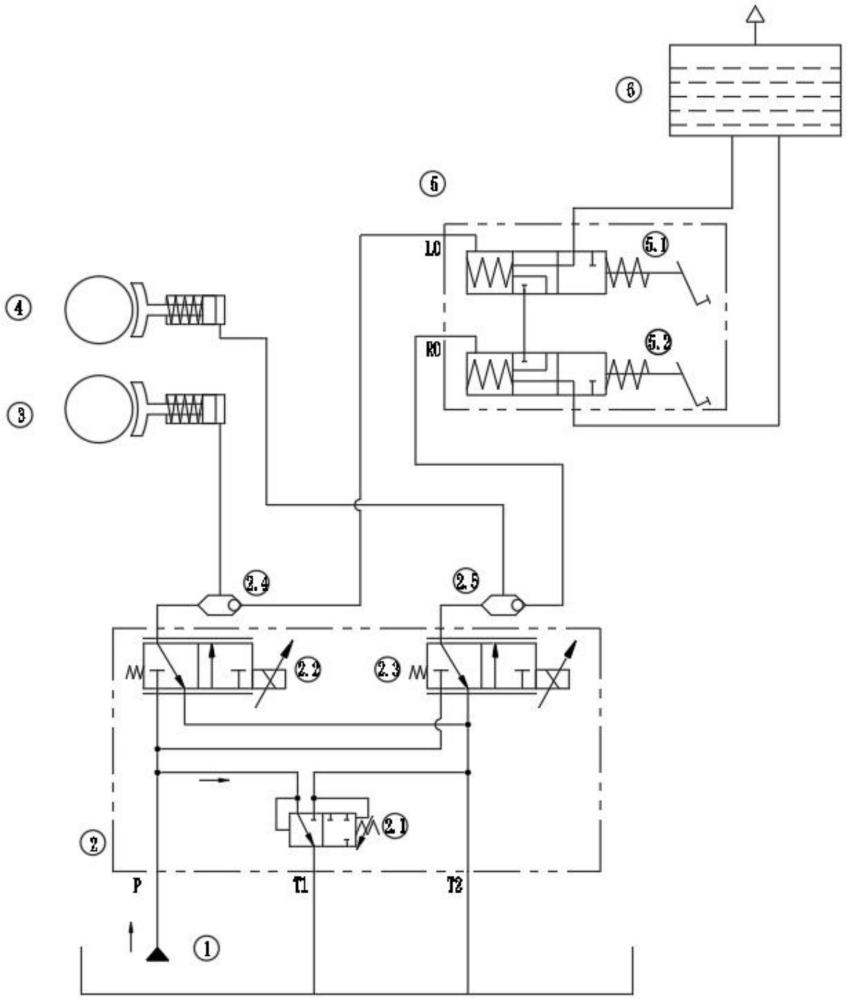
技术特征:1.一种拖拉机用电液制动系统,其特征在于,包括制动器终端组件、脚制动阀组(5)、电控制动阀组(2)、梭阀组件、压力油源(1)和油壶(6),所述压力油源(1)连接电控制动阀组(2),所述电控制动阀组(2)通过所述梭阀组件连接制动器终端组件,并形成电控制动油路;所述油壶(6)与脚制动阀组(5)连接,所述脚制动阀组(5)与所述梭阀组件连接,并形成组成脚制动油路;
2.根据权利要求1所述的一种拖拉机用电液制动系统,其特征在于,所述脚制动阀组(5)包括左脚制动阀(5.1)和右脚制动阀(5.2),所述左脚制动阀(5.1)进油口与所述油壶(6)的出油口连通,所述左脚制动阀(5.1)的出油口与所述梭阀组件的进油口连通,所述右脚制动阀(5.2)的进油口与所述油壶(6)的出油口连通,所述右脚制动阀(5.2)的出油口与所述梭阀组件的进油口连通。
3.根据权利要求2所述的一种拖拉机用电液制动系统,其特征在于,所述电控制动阀组(2)包括左电控阀(2.2)和右电控阀(2.3),所述左电控阀(2.2)和右电控阀(2.3)均为两位三通阀,所述左电控阀(2.2)进油口与所述压力油源(1)连通,所述右电控阀(2.3)进油口与所述压力油源(1)出油口连通,所述左电控阀(2.2)的两个出油口分别与所述梭阀组件的进油口和压力油源(1)的进油口连通,所述右电控阀(2.3)的两个出油口分别与所述梭阀组件的进油口和压力油源(1)的进油口连通。
4.根据权利要求3所述的一种拖拉机用电液制动系统,其特征在于,所述梭阀组件包括第一梭阀(2.4)和第二梭阀(2.5),所述第一梭阀(2.4)和第二梭阀(2.5)分别设有两个进油口,所述第一梭阀(2.4)的两个进油口分别与所述左脚制动阀(5.1)的出油口和左电控阀(2.2)的出油口连通,所述第二梭阀(2.5)的两个进油口分别与所述右脚制动阀(5.2)的出油口和右电控阀(2.3)的出油口连通,所述第一梭阀(2.4)和第二梭阀(2.5)的出油口分别与制动器终端组件连通。
5.根据权利要求4所述的一种拖拉机用电液制动系统,其特征在于,所述制动器终端组件包括左脚制动器(3)和右脚制动器(4),所述左脚制动器(3)与所述第一梭阀(2.4)的出油口连通,所述右脚制动器(4)与所述第二梭阀(2.5)的出油口连通。
6.根据权利要求5所述的一种拖拉机用电液制动系统,其特征在于,所述右电控阀(2.3)的进油口与所述左电控阀(2.2)进油口和压力油源(1)出油口之间的管路连通,所述左电控阀(2.2)的出油口与所述右电控阀(2.3)出油口和压力油源(1)进油口之间的管路连通。
7.根据权利要求6所述的一种拖拉机用电液制动系统,其特征在于,所述压力油源(1)包括油箱和油泵,所述油泵的进油口与所述油箱的出油连通,所述油泵的出油口分别与所述左电控阀(2.2)和右电控阀(2.3)的进油口连通。
8.根据权利要求3至7任一项所述的一种拖拉机用电液制动系统,其特征在于,还包括建压油路,所述建压油路包括背压阀(2.1),所述背压阀(2.1)的进油口和出油口分别与所述压力油源(1)的出油口和进油口连通。
9.根据权利要求8所述的一种拖拉机用电液制动系统,其特征在于,所述背压阀(2.1)的进油口与所述左电控阀(2.2)进油口和压力油源(1)出油口之间的管路连通,所述背压阀(2.1)的出油口与所述右电控阀(2.3)出油口和压力油源(1)进油口之间的管路连通。
10.一种拖拉机,其特征在于,包括如根据权利要求1-9任一项所述的一种拖拉机用电液制动系统。
技术总结本发明涉及一种拖拉机用电液制动系统,包括制动器终端组件、脚制动阀组、电控制动阀组、梭阀组件、压力油源和油壶,所述电控制动阀组与压力油源和所述梭阀组件组成电控制动油路,所述脚制动阀组与油壶和所述梭阀组件组成脚制动油路,所述制动器终端组件与所述电控制动油路连通,所述脚制动油路与所述电控制动油路通过所述梭阀组件连通。通过分别设置脚制动阀组与电控制动阀组,两者对制动器终端组件分别进行人为控制和电动控制,从而实现了制动器终端组件人为模式和电控模式的制动。技术研发人员:李德芳,谭洪洋,黄大磊,孙文勇,刘永坚,任光庆,孙有涛,张凯华,李浩,慕银银,刘朋飞受保护的技术使用者:潍柴雷沃智慧农业科技股份有限公司技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/283264.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。