一种卷包区域的自动小车管制系统及方法与流程
- 国知局
- 2024-09-05 14:20:57
本发明属于自动化物流系统,特别是涉及一种卷包区域的自动小车管制系统及方法。
背景技术:
1、在卷包区域,物品的运输和定位需要精确且高效。传统的运输方式主要依赖于人力,这不仅效率低下,而且对工人来说可能是一种负担。此外,当涉及到在复杂环境中进行精确导航时,如卷包区域,人工操作可能会带来错误和延误。
2、因此,需要一种自动化的运输系统来解决这些问题。
技术实现思路
1、为解决现有技术存在的上述技术问题,本发明提供一种卷包区域的自动小车管制系统及方法,本发明通过设置agv和其他自动输送车辆,同时通过管制系统进行车辆调度,解决路径冲突问题。
2、本发明采用的技术方案是:
3、一种卷包区域的自动小车管制系统,其特征在于,包括:
4、agv,通过顶部激光照射周围环境中的反光板进行定位;
5、自动输送小车,设置多辆,通过视觉识别或slam方式进行定位;
6、中央处理器,负责接收所有小车的定位信息,进行统一调度;当检测到路径重叠时,根据预设的优先级规则决定等待或避让;
7、通信模块r,用于接收和发送信息,分别设置在agv和自动输送小车上,并且采用无线通信方式与中央处理器通信连接;
8、地图数据库,存储所有小车的定位信息和路径规划信息,供中央处理器查询和更新。
9、进一步的,所述通信模块r包括无线收发器和天线,所述无线收发器用于接收和发送无线信号,天线用于将接收或发送的无线信号转换为电信号或将电信号转换为无线信号,所述中央处理器随时获取agv的状态信息并根据需要发送调度指令。
10、进一步的,所述中央处理器包括主控制器和存储器,所述主控制器根据预设的路径规划算法计算调度指令,并将调度指令存储在存储器中;
11、所述主控制器通过通信模块r接收agv的状态信息并从中提取位置和方向信息,基于位置和方向信息以及预设的路径规划算法w,主控制器计算新的调度指令并发送给通信模块r;
12、所述存储器中存储有多种路径规划算法w1,w2…,主控制器可以根据实际情况选择合适的算法进行计算。
13、一种卷包区域的自动小车管制方法,其特征在于,包括如下步骤:
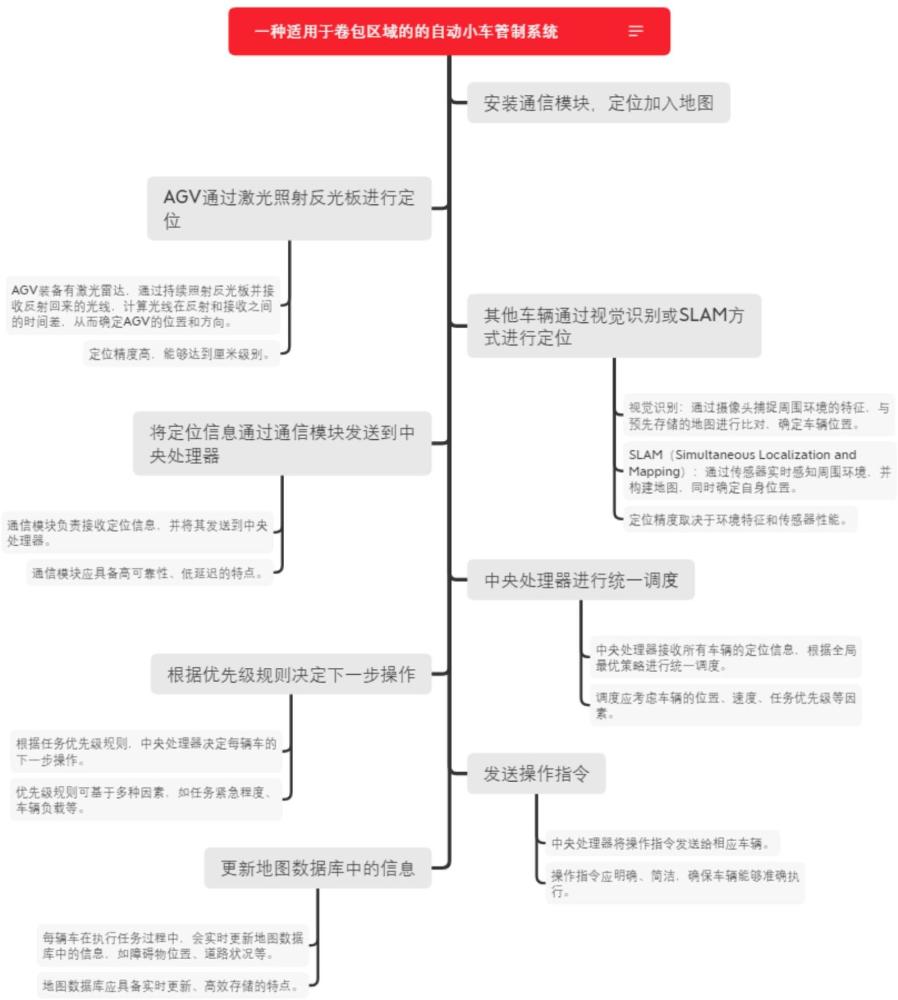
14、s1:安装通信模块r,定位加入地图;
15、s2:agv通过激光照射反光板进行定位;
16、s3:自动输送小车通过视觉识别或slam方式进行定位;
17、s4:将定位信息通过通信模块r发送到中央处理器;
18、s5:中央处理器进行统一调度,
19、s6:根据优先级规则决定下一步操作,并发送操作指令;
20、s7:更新地图数据库中的信息。
21、进一步的,在步骤s2中,agv装备有激光雷达,通过持续照射反光板并接收反射回来的光线,计算光线在发射和接收之间的时间差,从而确定agv的位置和方向。
22、进一步的,在步骤s3中,通过摄像头捕捉周围环境的特征,与预先存储的地图进行比对,确定车辆信息;通过传感器实时感知周围环境,并构建地图,同时确定自身位置。
23、进一步的,在步骤s5中,所述中央处理器接收所有车辆段定位信息,根据全局最优策略进行统一调度。
24、与现有技术相比,本发明的有益效果体现在:
25、1.本发明通过打通不同小车定位接口,实现了信息的共享和统一调度,提高了生产效率。
26、2.本发明在路径规划上,中央处理器能够根据优先级规则进行预决策,避免了碰撞和等待。
27、3.本发明系统设计灵活,可扩展性强,能够适应不同的生产环境和需求。
技术特征:1.一种卷包区域的自动小车管制系统,其特征在于,包括:
2.如权利要求1所述的一种卷包区域的自动小车管制系统,其特征在于,所述通信模块r包括无线收发器和天线,所述无线收发器用于接收和发送无线信号,天线用于将接收或发送的无线信号转换为电信号或将电信号转换为无线信号,所述中央处理器随时获取agv的状态信息并根据需要发送调度指令。
3.如权利要求1所述的一种卷包区域的自动小车管制系统,其特征在于,所述中央处理器包括主控制器和存储器,所述主控制器根据预设的路径规划算法计算调度指令,并将调度指令存储在存储器中;
4.一种卷包区域的自动小车管制方法,其特征在于,包括如下步骤:
5.如权利要求4一种卷包区域的自动小车管制方法,其特征在于,在步骤s2中,agv装备有激光雷达,通过持续照射反光板并接收反射回来的光线,计算光线在发射和接收之间的时间差,从而确定agv的位置和方向。
6.如权利要求4一种卷包区域的自动小车管制方法,其特征在于,在步骤s3中,通过摄像头捕捉周围环境的特征,与预先存储的地图进行比对,确定车辆信息;通过传感器实时感知周围环境,并构建地图,同时确定自身位置。
7.如权利要求1一种卷包区域的自动小车管制方法,其特征在于,在步骤s5中,所述中央处理器接收所有车辆段定位信息,根据全局最优策略进行统一调度。
技术总结本发明公开了一种卷包区域的自动小车管制系统及方法,方法包括:S1:安装通信模块R,定位加入地图;S2:AGV通过激光照射反光板进行定位;S3:自动输送小车通过视觉识别或SLAM方式进行定位;S4:将定位信息通过通信模块R发送到中央处理器;S5:中央处理器进行统一调度,S6:根据优先级规则决定下一步操作,并发送操作指令;S7:更新地图数据库中的信息。本发明通过打通不同小车定位接口,实现了信息的共享和统一调度,提高了生产效率;在路径规划上,中央处理器能够根据优先级规则进行预决策,避免了碰撞和等待。技术研发人员:徐琦,黎勇,舒梦,沈冬晖,沈苗杰,孙顺凯,李国瑞,王宏铝,林翌臻,陈海涛,陈良,陆海华,周文罡,郑林杰,方海林受保护的技术使用者:浙江中烟工业有限责任公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/285924.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表