一种无人机相对位姿定位方法及系统
- 国知局
- 2024-09-05 14:26:16
本发明涉及无人机视觉定位,尤其涉及一种无人机相对位姿定位方法及系统。
背景技术:
1、近年来,无人机系统能力不断提升,在城市反恐侦察、灾害监测、物流配送、交通疏导等军事和民用领域崭露头角,应用前景尤为广阔。无人机定位是无人机遂行动态任务的必要环节,也是无人机自主能力的重要体现。目前室内定位技术越来越成熟,已经出现了uwb定位、wifi定位、蓝牙定位、二维码定位以及slam定位等方案。
2、在定位技术领域中,二维码的优势也正在被越来越广泛的发掘和获得认可,并用于机器人或无人机等智能设备的定位及辅助定位模块的开发中,逐渐成为机器人巡检及智能物流场景中的重要定位方式之一。尤其在因特征过于重复,导致单纯依靠激光、视觉等传感器容易丢失定位的情形之下(例如数据中心连排机柜场景),二维码可以通过如为机器人里程计提供后验信息等方式,大大降低定位丢失的可能性。
3、现有的无人机相对位姿定位技术大多基于相机成像原理解算出无人机相对于无人车平台的位姿,但该过程对无人机的识别距离较为敏感,在无人机距离无人车平台较近时,二维码标记无法完整出现在视野范围内,在无人机距离无人车平台较远时,二维码标记在视野范围内占据的区域太小,导致无人机相对位姿的准确性较低。
技术实现思路
1、本发明提供了一种无人机相对位姿定位方法及系统,用于解决现有的无人机相对位姿定位技术大多对无人机的识别距离较为敏感,导致无人机相对位姿的准确性较低的技术问题。
2、本发明第一方面提供的一种无人机相对位姿定位方法,包括:
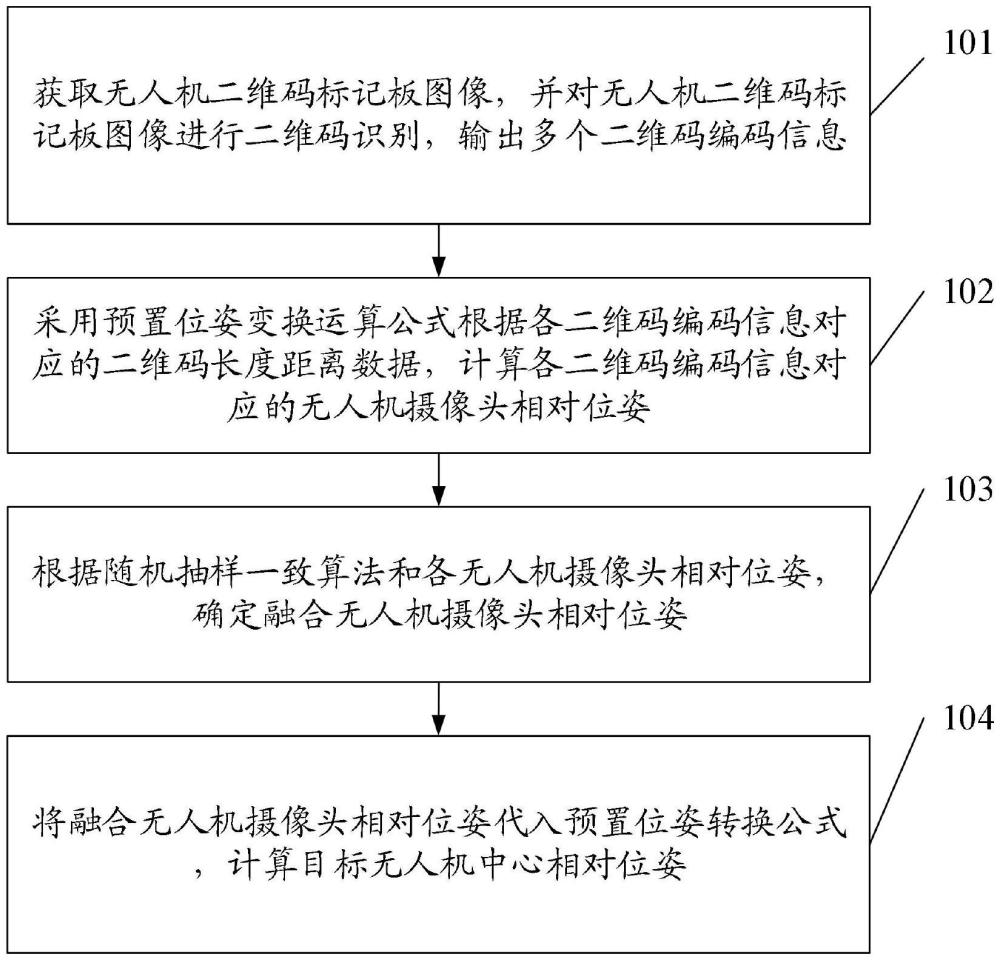
3、获取无人机二维码标记板图像,并对所述无人机二维码标记板图像进行二维码识别,输出多个二维码编码信息;
4、采用预置位姿变换运算公式根据各所述二维码编码信息对应的二维码长度距离数据,计算各所述二维码编码信息对应的无人机摄像头相对位姿;
5、根据随机抽样一致算法和各所述无人机摄像头相对位姿,确定融合无人机摄像头相对位姿;
6、将所述融合无人机摄像头相对位姿代入预置位姿转换公式,计算目标无人机中心相对位姿。
7、可选地,所述对所述无人机二维码标记板图像进行二维码识别,输出多个二维码编码信息的步骤,包括:
8、对所述无人机二维码标记板图像进行预处理,生成去噪二维码标记板图像;
9、采用最大类间方差法对所述去噪二维码标记板图像进行图像分割,输出黑白二维码标记板图像;
10、采用轮廓识别算法对所述黑白二维码标记板图像进行图形轮廓提取,输出多个图形轮廓;
11、采用多边形近似算法对各所述图形轮廓进行筛选,输出各所述图形轮廓对应的二维码候选框;
12、对各所述二维码候选框进行透视变换,生成各所述二维码候选框对应的校正二维码候选框;
13、对各所述校正二维码候选框进行网格划分,输出各所述校正二维码候选框对应的多个像素网格;
14、采用预置二维码字典根据统计的各所述像素网格中的像素数目,生成各所述校正二维码候选框对应的二维码编码信息。
15、可选地,所述预置位姿变换运算公式包括位姿变换矩阵公式组和相对位姿运算公式;所述二维码长度距离数据包括二维码长度、二维码水平距离和二维码垂直距离;所述采用预置位姿变换运算公式根据各所述二维码编码信息对应的二维码长度距离数据,计算各所述二维码编码信息对应的无人机摄像头相对位姿的步骤,包括:
16、基于各所述二维码编码信息对应的二维码长度,确定各所述二维码编码信息对应的角点坐标数据;
17、根据各所述角点坐标数据和位姿变换矩阵公式组,确定各所述二维码编码信息对应的位姿变换矩阵;
18、采用相对位姿运算公式根据各所述位姿变换矩阵、各二维码水平距离和各二维码垂直距离,计算各所述二维码编码信息对应的无人机摄像头相对位姿。
19、可选地,所述融合无人机摄像头相对位姿包括融合旋转矩阵和融合平移向量;所述根据随机抽样一致算法和各所述无人机摄像头相对位姿,确定融合无人机摄像头相对位姿的步骤,包括:
20、按照预置抽样比例在各所述无人机摄像头相对位姿中选取出多个第一中间无人机摄像头相对位姿;
21、对各所述第一中间无人机摄像头相对位姿中的第一无人机摄像头平移向量进行均值运算,输出第一平移向量均值;
22、按照所述预置抽样比例在各所述无人机摄像头相对位姿中选取出多个第二中间无人机摄像头相对位姿;
23、对各所述第二中间无人机摄像头相对位姿中的第二无人机摄像头平移向量进行均值运算,输出第二平移向量均值;
24、对所述第一平移向量均值和所述第二平移向量均值进行差值运算,输出均值误差并与预置误差阈值比较;
25、若所述均值误差小于所述预置误差阈值,则将所述第二平移向量均值作为融合平移向量;
26、对各所述第二中间无人机摄像头相对位姿中的第二无人机摄像头旋转矩阵进行欧拉角融合,融合旋转矩阵。
27、可选地,所述对各所述第二中间无人机摄像头相对位姿中的第二无人机摄像头旋转矩阵进行欧拉角融合,融合旋转矩阵的步骤,包括:
28、采用预置欧拉角运算公式根据各所述第二无人机摄像头旋转矩阵中的矩阵元素,计算各所述第二无人机摄像头旋转矩阵对应的欧拉角;
29、对各所述欧拉角进行均值运算,输出欧拉角均值;
30、根据所述欧拉角均值和预置融合旋转矩阵转换公式组,确定融合旋转矩阵。
31、可选地,所述角点坐标数据包括第一角点坐标、第二角点坐标、第三角点坐标和第四角点坐标,第一角点坐标包括第一角点横坐标、第一角点纵坐标和第一角点竖坐标,第二角点坐标包括第二角点横坐标、第二角点纵坐标和第二角点竖坐标,第三角点坐标包括第三角点横坐标、第三角点纵坐标和第三角点竖坐标,第四角点坐标包括第四角点横坐标、第四角点纵坐标和第四角点竖坐标;所述位姿变换矩阵公式组,具体为:
32、
33、其中,s为像素点深度值;u为图像坐标系下的无人机二维码标记板图像的像素点横坐标;v为图像坐标系下的无人机二维码标记板图像的像素点纵坐标;t1为位姿变换矩阵中的第一矩阵元素;xm为角点横坐标,角点横坐标包括第一角点横坐标、第二角点横坐标、第三角点横坐标和第四角点横坐标;ym为角点纵坐标,角点纵坐标包括第一角点纵坐标、第二角点纵坐标、第三角点纵坐标和第四角点纵坐标;zm为角点竖坐标,角点竖坐标包括第一角点竖坐标、第二角点竖坐标、第三角点竖坐标和第四角点竖坐标;t2为位姿变换矩阵中的第二矩阵元素;t3为位姿变换矩阵中的第三矩阵元素;t4为位姿变换矩阵中的第四矩阵元素;t5为位姿变换矩阵中的第五矩阵元素;t6为位姿变换矩阵中的第六矩阵元素;t7为位姿变换矩阵中的第七矩阵元素;t8为位姿变换矩阵中的第八矩阵元素;t9为位姿变换矩阵中的第九矩阵元素;t10为位姿变换矩阵中的第十矩阵元素;t11为位姿变换矩阵中的第十一矩阵元素;t12为位姿变换矩阵中的第十二矩阵元素。
34、所述相对位姿运算公式,具体为:
35、
36、其中,rw为无人机摄像头相对位姿中的无人机摄像头旋转矩阵;tw为无人机摄像头相对位姿中的无人机摄像头平移向量;dx为二维码水平距离;dy为二维码垂直距离;rm为位姿变换矩阵中的位姿旋转矩阵;tm为位姿变换矩阵中的位姿平移向量。
37、本发明第二方面提供的一种无人机相对位姿定位系统,包括:
38、获取模块,用于获取无人机二维码标记板图像,并对所述无人机二维码标记板图像进行二维码识别,输出多个二维码编码信息;
39、采用模块,用于采用预置位姿变换运算公式根据各所述二维码编码信息对应的二维码长度距离数据,计算各所述二维码编码信息对应的无人机摄像头相对位姿;
40、根据模块,用于根据随机抽样一致算法和各所述无人机摄像头相对位姿,确定融合无人机摄像头相对位姿;
41、计算模块,用于将所述融合无人机摄像头相对位姿代入预置位姿转换公式,计算目标无人机中心相对位姿。
42、本发明第三方面提供的一种电子设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述任一项所述的无人机相对位姿定位方法的步骤。
43、本发明第四方面提供的一种计算机可读存储介质,其上存储有计算机程序/指令,所述计算机程序/指令被处理器执行时实现如上述任一项所述的无人机相对位姿定位方法的步骤。
44、本发明第五方面提供的一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现如上述任一项所述的无人机相对位姿定位方法的步骤。
45、从以上技术方案可以看出,本发明具有以下优点:
46、本发明的上述技术方案提供了一种无人机相对位姿定位方法,首先获取无人机二维码标记板图像,并对无人机二维码标记板图像进行二维码识别,输出多个二维码编码信息;接着,采用预置位姿变换运算公式根据各二维码编码信息对应的二维码长度距离数据,计算各二维码编码信息对应的无人机摄像头相对位姿;根据随机抽样一致算法和各无人机摄像头相对位姿,确定融合无人机摄像头相对位姿;最后,将融合无人机摄像头相对位姿代入预置位姿转换公式,计算目标无人机中心相对位姿;基于上述方案,通过对无人机二维码标记板图像进行二维码识别得到的多个二维码编码信息,结合相对位姿代入预置位姿转换公式、预置位姿变换运算公式和随机抽样一致算法,确定目标无人机中心相对位姿,该过程整合了多个二维码的位姿信息,降低了无人机的识别距离的敏感度,进一步地提高了无人机相对位姿的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240905/286473.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表