一种线驱动解耦机器人手臂
- 国知局
- 2024-09-05 14:35:40
本发明涉及人形机器人领域领域,尤其涉及一种线驱动解耦机器人手臂。
背景技术:
1、随着科技的发展,机器人的应用领域逐渐由工业转向更贴近人们的日常生活,对机器人的要求也更加复杂多样。由此促成了人形机器人领域的研究和发展,而手臂作为人形机器人的重要组成部分,更是成为了当下人形机器人研究的热点。
2、传统的机械臂通常采取电机直接进行驱动,保证高精度、高效率、高稳定性的同时,却受限于体积质量大、运动过程中惯性大、自重比小等缺点,因此并不适用于人形机器人手臂的研发设计。线驱动凭借其柔顺性好、结构简单轻便、转动惯量下、负载自重比高等优点被广泛应用于人形机器人手臂。
3、耦合问题是线驱动中的一大难点。在线缆缠绕传递动力的过程中,往往会遇到上一关节的运动导致下一关节上的线缆长度发生变化,从而造成下一关节运动精度的误差,上下关节无法实现独立的运动。为了解决线驱动中的耦合问题,现有技术分别从主动解耦与被动解耦两方面开展。主动耦合即通过软件控制,对相邻关节运动角加以补偿,当上一关节运动后,对下一关节实施反向运动,以达到弥补线缆长度的变化。被动耦合则是通过设计解耦机构,尽可能使线缆长度保持不变或变化量相同,实现关节的独立运动,但是现有的被动耦合技术发展并不成熟。
技术实现思路
1、本发明所要解决的技术问题是提供一种线驱动解耦机器人手臂,解决线驱动过程中关节耦合这一问题。
2、为解决上述技术问题,本发明所采取的技术方案是:
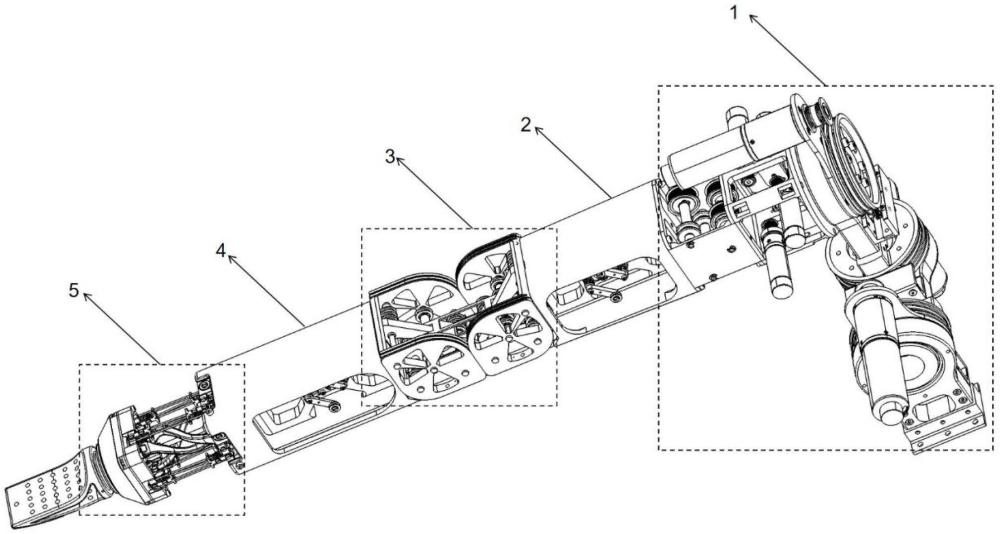
3、一种线驱动解耦机器人手臂,包括由近端至远端依次固定连接的肩关节、大臂、肘关节、小臂、腕关节和末端执行器,其特征在于:
4、所述肩关节包括三个肩运动模块,每一肩运动模块具有单旋转自由度的旋转部,三个肩运动模块依次固定,使三个旋转部的旋转轴线彼此垂直布置;
5、所述大臂的近端与肩关节远端的旋转部固定,所述大臂上具有横向可转动固定的收卷轴a、收卷轴b和收卷轴c,每一收卷轴上连接有驱动其旋转的第一驱动部;
6、所述肘关节包括:
7、两个关节座,所述关节座呈u形,其相对的两侧具有竖直设置的滚板,所述滚板位于关节座开口侧的端面为导向面,所述导向面的下段为竖直的限位段,上段为圆弧倒角的滚动段,两个关节座的开口相对设置,且对应的导向面相接触,两个关节座内的中部横向固定有中心轴,两根中心轴之间具有连接杆,所述连接杆的两端均与对应的中心轴可转动的固定;
8、第一张力放大机构,包括第一驱动线缆及对称固定于两个关节座内的两根第一轴部,两根第一轴部上均可转动的固定有多槽式的第一线轮,所述第一驱动线缆在两个第一线轮之间缠绕n1圈后朝近端引出并正向缠绕于收卷轴a上;
9、第二张力放大机构,包括第二驱动线缆及对称固定于两个关节座内的两根第二轴部,两根第二轴部上均可转动的固定有多槽式的第二线轮,所述第二驱动线缆在两个第二线轮之间缠绕n2圈后朝近端引出并反向缠绕于收卷轴a上;
10、所述腕关节包括:
11、上固定架,于上固定架上可转动的固定有驱动转轴,所述驱动转轴的两端贯穿上固定架,所述驱动转轴的远端与末端执行器固定,所述驱动转轴连接有驱动其旋转的第二驱动部;
12、下固定架,与肘关节远端的关节座固定;
13、4-uu并联机构,固定于上固定架和下固定架之间;
14、四组第三张力放大机构,均匀环绕于3-uu并联机构的外侧,四组第三张力放大机构分置于3-uu并联机构的前、后、左、右,每一组第三张力放大机构包括上滑轮组和下滑轮组,所述上滑轮组固定于上固定架上,所述下滑轮组固定于下固定架上,上滑轮组和下滑轮组间缠绕有第三驱动线缆,所述第三驱动线缆的自由端经引出导轮朝向近端引出;
15、其中,前、后两侧的两根第三驱动线缆引出后一正一反缠绕于收卷轴b上,左、右两侧的两根第三驱动线缆引出后一正一反缠绕于收卷轴c固定。
16、进一步的技术方案在于,所述肩关节包括三个肩运动模块,每一肩运动模块包括:
17、基座;
18、驱动轮组,包括可转动的固定于基座上的主动线轮和从动线轮,所述主动线轮上连接有驱动其旋转的第三驱动部,所述主动线轮即为肩关节的旋转部;
19、第四驱动线缆,其一端与从动线轮固定,另一端呈麻花式环绕从动线轮和主动线轮后与主动线轮固定;及
20、第五驱动线缆,与第四驱动线缆的缠绕方向相反,所述第五驱动线缆的一端与从动线轮固定,另一端呈麻花式环绕从动线轮和主动线轮后与主动线轮固定。
21、进一步的技术方案在于,所述肩运动模块还包括:
22、第一张紧机构,包括张紧座,固定于基座上,于张紧座内可浮动的固定有第一张紧轮和第二张紧轮,所述第一张紧轮和第二张紧轮能够靠近或远离从动线轮,所述第四驱动线缆绕于第一张紧轮上,所述第五驱动线缆绕于第二张紧轮上。
23、进一步的技术方案在于,所述张紧座的上、下端板上均开设有两条平行设置的长条的滑孔,与每一滑孔内可滑动的设有滑杆,所述滑杆与张紧座的侧板之间固定有第一弹簧,所述第一张紧轮和第二张紧轮分别固定于对应的滑杆上。
24、进一步的技术方案在于,两个关节座上相接触的两个导向面之间具有凹凸配合的嵌合结构。
25、进一步的技术方案在于,两个关节座上相接触的两个导向面之间具有限制线缆,所述滚板四周的外缘上具有限制槽,所述限制线缆嵌入一个滚板的限制槽内,其两端分别与两个关节座上滚板固定。
26、进一步的技术方案在于,所述上固定架上固定有行星齿轮减速器,所述驱动转轴为星齿轮减速器的中心轴。
27、进一步的技术方案在于,所述大臂上还具有横向可转动固定的收卷轴d;
28、所述第二驱动部包括:
29、绞盘驱动组件,包括绞盘轴,可转动的固定于下固定架上,所述绞盘轴的近端固定有绞盘,还包括可转动的固定于下固定架上的两个变向轮,所述变向轮的轴线与绞盘轴垂直;
30、万向节轴,其两端具有万向节,所述万向节轴的远端与驱动转轴固定,近端与绞盘轴固定;
31、一根第六驱动线缆,其中部缠绕于绞盘上,一端经一变向轮朝向近端引出后正向缠绕于收卷轴d上,另一端经另一变向轮朝向近端引出后反向缠绕于收卷轴d上。
32、进一步的技术方案在于,所述小臂和/或小臂上具有对每一根第三驱动线缆进行张紧的第一张紧轮总成。
33、进一步的技术方案在于,所述大臂和/或小臂上具有分别对第一驱动线缆、第二驱动线缆和第六驱动线缆的两端进行张紧的第二张紧轮总成。
34、采用上述技术方案所产生的有益效果在于:
35、该线驱动解耦机器人手臂,肘关节采用对称式盘片设计,有效降低因线缆张紧力不均匀造成的侧向倾覆,提升了运动过程中的稳定性和负载能力,使用张力放大机构,在不增加关节质量和惯性的情况下,实现肘关节扭矩和刚度的放大,避免了肘关节运动过程中的耦合问题。
36、腕关节的俯仰和偏航自由度通过两自由度3-uu并联机构实现,中心轴滚转自由度由绞盘机构实现;驱动线缆结合柔性张力放大机构,在腕关节的扭矩和刚度得到提升的前提下驱动所述腕关节实现三自由度的运动。
37、肩关节采用1.5mm高刚度线缆,肘关节腕关节采用0.8mm刚轻度线缆。动力源远离末端集中在肩关节附近,减少了运动惯量,提升了整体的强度和运动性能。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287189.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表