一种基于深度学习的编队识别目标选择方法
- 国知局
- 2024-09-05 14:44:09
本发明涉及编队识别领域,具体是一种基于深度学习的编队识别目标选择方法。
背景技术:
1、制导无人飞行器的水面目标选择通常有特征识别和编队识别两类技术。特征识别依赖指定目标区别于编队内其它成员的单一特征、或者多特征加权的综合特征,但随着飞行器射程增长带来的自控时间的增长,末端编队态势的变化已不符合发射前确定的特征,从而超出飞行器特征识别的能力,在面对编队内存在同类型成员时容易出现误命中现象,原有特征识别满足不了多目标识别的要求。编队识别是将飞行器末制导传感器搜捕得到的编队态势,与存在飞行器上的编队态势(目标指示阶段实时探测或者情报数据库预先存储)进行比对,通过匹配两个态势的编队特征相似程度,并排序识别出编队预定目标进行精确打击的过程。
2、编队识别目标选择技术首先在于编队队形识别。编队队形识别属于集群识别的一种,是末制导技术的一个重要发展方向,是目标态势认知能力提升的基础和关键。编队队形识别技术是通过一定的方法,对传感器所探测到的目标编队队形进行识别和分析,以了解目标的状态和可能的行动意图,并根据这些信息进行火力分配和打击预定目标。为了保证行动的需要和航行的安全,水面编队队形具有稳定性和规律性,这为队形识别提供了主要依据。
3、目前对编队队形识别的方法主要有模板匹配、数学分析、基于领域知识的模式识别、神经网络等,随着人工智能技术的发展,利用深度学习进行编队识别的方法受到重视,这些方法存在以下缺陷:1)在编队队形发生错位和紊乱时,无法准确识别队形。2)当v形队和环形队噪声较大时,区分度不高,而且在进行目标选择时要对队列线进行初始划分,需要人工进行干预。
4、现有的编队识别技术往往侧重于队形识别而非目标选择,且存在未充分考虑编队末端态势变化和实时性较差等缺陷。除此之外,制导无人飞行器对水面编队目标的选择多根据红外或者电磁特性,面对同类型目标容易出现误命中现象,难以达到毁伤既定目标的效果。
技术实现思路
1、本发明的目的是提供一种基于深度学习的编队识别目标选择方法,包括以下步骤:
2、1)获取水面目标编队信息,并生成编队队形图;
3、2)构建基于改进lenet卷积神经网络的编队队形识别模型;
4、3)将编队队形图输入至编队队形识别模型中,得到队形识别结果;
5、4)根据队形识别结果对目标指示阶段编队目标进行排序编号;
6、5)选定待跟踪目标,并将待跟踪目标编号传输至飞行器;
7、6)飞行器在末制导阶段,通过末制导传感器获取水面目标编队态势,并对目标编队进行排序编号,然后匹配待跟踪目标,并跟踪所述待跟踪目标。
8、进一步,所述编队队形识别模型包括输入层、多个卷积层、多个批量归一化层、多个relu层、多个最大池化层、多个全连接层、softmax层和分类层;
9、编队队形识别模型采用的激活函数如下所示:
10、
11、式中,f(x)表示激活函数;x为输入;
12、编队队形识别模型中参数的优化过程如下所示:
13、
14、式中:β1是一阶矩衰减系数,0<β1<1;β2是二阶矩衰减系数,0<β2<1;gt是目标函数求导梯度;mt为t时刻,梯度在动量形式下的一阶矩估计;vt为t时刻,梯度在动量形式下的二阶矩估计;为偏差纠正后的一阶矩估计;为偏差纠正后的二阶矩估计;是β1的t次方;是β2的t次方;θt+1为更新后的参数值;η是学习率,ε是常数。θt为更新前的参数值。
15、进一步,所述队形识别结果包括队列线条数和编队轮廓;
16、所述队列线条数包括队列线一条和队列线两条;
17、队列线为一条时,编队轮廓包括单横队、单纵队和方位队;
18、队列线为两条时,编队轮廓包括双横队、双纵队、v形队和环形队。
19、进一步,当编队轮廓为单横队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
20、
21、式中,i=1,2,3,…,t;t为成员数量;dx、dz为横向间距、纵向间距;n(0,σ12)、n(0,σ22)表示分布;σ12、σ22表示位置均方差、航向均方差;γ表示编队航向角度;
22、当编队轮廓为双横队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
23、
24、当编队轮廓为单纵队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
25、
26、当编队轮廓为双纵队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
27、
28、当编队轮廓为方位队形时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
29、
30、当编队轮廓为v形队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
31、
32、式中,n(γ,σ22)表示分布;β表示队列角;
33、当编队轮廓为环形队时,各成员在量测空间中的坐标(xi,zi),航向ri如下所示:
34、
35、进一步,考虑航向绕回波中心扰动变化,编队成员航向量坐标如下所示:
36、
37、式中,xi″、zi″为考虑航向绕回波中心扰动变化的编队成员航向量坐标;xi0、zi0为中间参量;xi、zi为更新前的编队成员航向量坐标;(xi,zi)为各成员在量测空间中的坐标;ri为航向;γ为编队航向角度。
38、进一步,飞行器在自控飞行阶段,若编队绕某一旋转点进行转向,则飞行器末制导传感器开启后目标编队成员坐标(xi′,zi′)如下所示:
39、
40、式中,(x0,z0)为旋转中心点坐标;q为逆时针旋转角。
41、飞行器在自控飞行阶段,若目标编队间距发生变化,则飞行器末制导传感器开启后目标编队成员坐标(xn′,zn′)如下所示:
42、
43、式中,(xn+1′,zn+1′)为变化坐标;
44、飞行器在自控飞行阶段,若目标编队间距发生变化,则飞行器末制导传感器开启后目标编队间隔(dh′,zz′)如下所示:
45、
46、式中,当k1、k2∈(0,1)时,为队形间距缩小比例;k1、k2∈(1,∞)时为队形间距放大比例;(dh,dz)为间距发生变化前,目标编队间隔。
47、进一步,队列线为一条时,对目标指示阶段编队目标进行排序编号的步骤包括:
48、利用一条直线对目标指示阶段的编队成员量测空间坐标进行拟合,该直线即为队列线;
49、然后结合航向信息得到基准成员,再以基准成员为参考,根据基准成员以外的其他成员与基准成员的相对位置对编队目标进行排序编号;
50、飞行器在末制导阶段,通过末制导传感器获取水面目标编队态势,并对目标编队进行排序编号,匹配待跟踪目标的步骤为:
51、飞行器通过末制导传感器获取水面目标编队态势,并对目标编队进行排序编号,然后在编号后的目标编队中,选择出与待跟踪目标编号相同的目标。
52、进一步,队列线为两条时,对目标指示阶段编队目标进行排序编号的步骤包括:
53、1)根据队形识别结果实时建立标准模板态势编队;
54、2)将待跟踪目标态势和模板态势编队成员坐标hough变换映射到参数空间;
55、3)在参数空间,通过isodata算法对坐标进行聚类,得到误差点;
56、4)在参数空间中,根据hough变换的原理,利用误差点从模板态势到目标指示态势发生的变化抵消理想点发生的变化,寻找目标指示态势参数空间的理想点,从而消除目标指示态势中队列线的误差;
57、5)将目标指示态势参数空间理想点反hough变换到量测空间,得到实际编队的基准成员和队列线,并进行排序编号。
58、飞行器在末制导阶段,通过末制导传感器获取水面目标编队态势,并对目标编队进行排序编号,匹配待跟踪目标的步骤为:
59、飞行器在自控飞行阶段,发生旋转、缩放变化,若末制导阶段探测到的编队类型相对于目标指示阶段不变,则对编队内目标进行排序编号,选择与目标指示阶段预选的目标编号相同的目标。
60、进一步,hough变换的步骤如下所示:
61、1)基于点和线的对偶性,利用hough变换函数建立量测空间内的点与参数空间的曲线的对应关系;(x,z)为坐标;
62、对于量测空间中任意点hough变换函数如下所示:
63、
64、式中,θ为量测空间原点到过该点的任意一条直线的垂线与x轴正向所成的夹角;|ρ|是垂线长度;θ0、ρ0为夹角初、垂线长度初值;
65、2)记量测空间的目标编队成员坐标在参数空间存在对应的正弦曲线为li;i=1,2,…,t,t为编队目标的个数,量测空间的编队目标集合在参数空间存在对应的正弦曲线簇
66、取量测空间全体折线计算在参数空间对应正弦曲线交点li∩lj=rk=(θk,ρk),构成具有个样本的数据集合x={r1,r2,…,rn},rk表示数据样本集合x的第k个样本。
67、进一步,通过isodata算法对坐标进行聚类的步骤包括:
68、1)初始化参数:设定期望的聚类数k、簇内的最小样本数θn、聚类间的最小距离θc、标准偏差θs、每次合并的最大聚类对数l和允许迭代的次数i;
69、2)选取初始聚类中心:设定初始的聚类数为c和初始的聚类中心mi,按照最小距离原则分配到c个聚类中;i=1,2,...,c;
70、若x满足公式(15),则
71、||x-mi||<||x-mj||(j=1,2,...,c;i≠j) (15)
72、则x∈wi将所有样本分到对应的各个类中。
73、3)重新聚类:若有任何一个聚类中样本数ni<θn,则舍去wi,将其与距离最近的簇合并,并令c=c-1;
74、4)更新聚类中心并计算wi中样本数据距其相应的聚类中心mi的平均距离di、所有样本数据到其相应的聚类中心的总距离d,即:
75、
76、
77、
78、式中,n为总样本数;ni为第i个聚类中样本数;
79、5)若当前迭代数等于允许迭代的次数i,则令θn=0,转步骤8);
80、若当次迭代是偶数次迭代或c≥2k,则直接转步骤8);
81、若当前迭代数则进入步骤6);
82、6)对于每一聚类wi,根据距离值计算标准差向量σi=(σ1i,σ2i,...,σni)t,并得到每一个聚类中具有最大标准偏差的分量σimax;
83、其中,标准差向量的分量如下所示:
84、
85、式中,是第k个样本的第j个分量;mij是第i个聚类中心的第j个分量;σij是第i个聚类的标准偏差的第j个分量;n是样本x的维数。
86、7)分裂:对任一个σimax,若存在σimax>θs,并且有di>d且ni>2(θn+1),则把聚类簇wi分裂成2个聚类,聚类中心分别为和取消聚类中心mi,且令c=c+1,转至步骤1);
87、聚类中心和如下所示:
88、
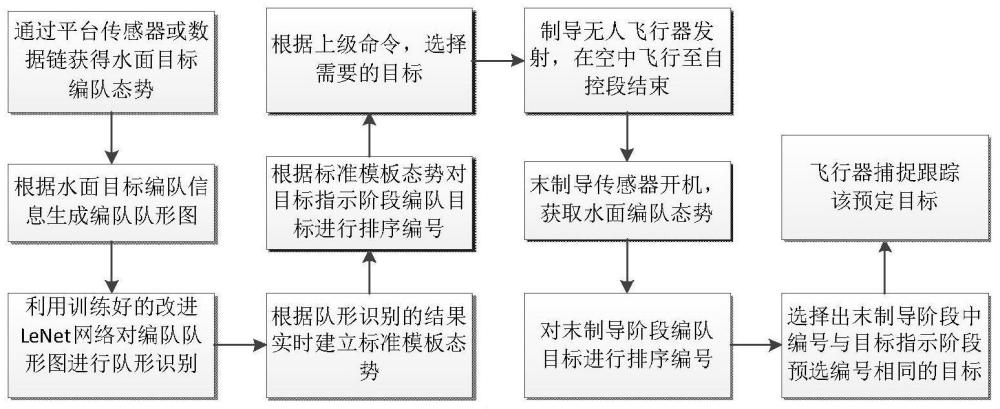
89、式中,α、γi为系数。
90、8)排序:对于所有的聚类中心,计算两两之间的距离dij
91、dij=||mi-mj||,(i=1,2,...,c-1;j=i+1,i+2,...c) (21)
92、比较dij和θc,将dij<θc的值按递增次序排列,即:
93、
94、9)合并:从最小的开始,将距离为的两类聚类中心和合并,并计算新的聚类中心ml,且令c=c-1。
95、
96、式中,为聚类中心和中的样本数;
97、10)若当前迭代次数为等于允许迭代的次数i或者结果收敛,则结束,否则令迭代次数加1,并转至步骤1)。
98、值得说明的是,本发明提供一种基于深度学习的制导无人飞行器编队识别目标选择方法,该方法首先通过平台传感器或数据链获得水面目标编队态势,根据水面目标编队信息建立编队回波模型生成编队队形图,然后利用训练好的改进lenet卷积神经网络对编队队形图进行队形识别,再根据队形识别的结果实时建立标准模板态势,根据标准模板态势对目标指示阶段编队目标进行排序编号,根据上级命令选择出需要打击的目标。飞行器自控飞行阶段,编队目标发生旋转和缩放变换,飞行器末制导传感器开机,获取水面目标编队态势,并且对编队目标进行排序编号,然后匹配目标指示目标,最后飞行器捕捉跟踪该目标。
99、本发明的技术效果是毋庸置疑的,本发明基于改进lenet网络、hough变换和isodata`算法,提出水面目标编队目标选择建模方法,提高选择效率,增强工程操作性,无需对目标编队队列线进行初始划分,方便快捷,准确率高。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287913.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表