一种动态城市交通场景数字孪生建模方法
- 国知局
- 2024-09-11 14:17:15
本发明涉及交通仿真,尤其涉及一种动态城市交通场景数字孪生建模方法。
背景技术:
1、随着汽车智能化和网联化技术的快速发展,自动驾驶控制算法的测试需求不断增加。传统的实车道路测试方法,虽然直观,但其昂贵的时间成本和资源投入限制了自动驾驶控制算法的快速迭代和广泛应用。虚拟环境中的仿真测试成为解决这一问题的重要途径。然而,现有研究主要依赖于公开的离线交通流数据集进行车辆模型标定、车辆行为决策和车辆轨迹规划等方面的研究。这些预定义车速和轨迹仅能构建静态仿真测试场景,而忽略了交通参与者之间的动态博弈,因此难以准确评估控制算法在真实环境中的实际性能表现。
2、sumo(simulation ofurban mobility)是由german aerospace center开发的一款用于模拟城市交通流的开源交通仿真工具。它为仿真环境中的每辆车配置了独立的驾驶员模型,通过这些模型控制车辆在遵守交通规则的前提下自由行驶。在仿真过程中,每辆车的驾驶员模型能够根据车辆周围交通环境动态调整车辆的行为,包括变道、超车、加速和减速等。如图1所示,假设环境中某辆车的驾驶员模型发现前车速度减缓且与前车之间的距离逐渐减少,该车的驾驶员模型将主动控制车辆变道超车或是减速以保持安全距离。因此,基于sumo开发的交通仿真模型能够有效地模拟现实道路上各个交通参与者之间的动态博弈,从而真实的模拟复杂城市交通场景。
3、目前,已有一些基于sumo的城市交通仿真模型,比如:
4、中国专利【cn 113409573 b】《一种基于matlab的sumo城市交通仿真及车流量控制方法》,提出了一种通过matlab实现sumo车流量的精准建模的方法。该方法通过matlab将实地考察获取的道路及主要路口车流量信息批量处理成转弯概率文件和车辆文件,并根据这些生成sumo仿真需求的交通流文件,从而显著提高了建模效率。
5、中国专利【cn 115481531 b】《基于sumo的路网交通流实时孪生方法及系统》,提出了一种动态闭环路网交通流孪生方法,可根据真实道路上交通检测点的数据反推路网实时交通流,并通过sumo二次开发手段将估算的网络流以车辆输入的形式配置在sumo路网中进行复现,实现了交通实际数据到交通仿真模型的迁移。
6、中国专利【cn 109284527 b】《一种城市路段交通流仿真的方法》,提出了一种基于元胞自动机模型与概率论方法模拟城市路段交通流的方法。通过元胞自动机模型将行驶道路抽象为元胞网格空间,将道路车辆抽象为元胞,并结合表示司机驾驶习惯和驾驶意愿的变道概率进行决策,使仿真更加接近现实情况。
7、但是,现有技术存在以下问题:通常依靠现场采集的方式获得交通流数据,既费时又费力,人工成本很高;交通场景建模通常需要手工定义创建仿真路网,对于大规模仿真场景,手工创建路网的工作量较大;缺少如何根据采集的真实交通流数据配置sumo交通仿真模型的交通流参数。
8、因此,本领域的技术人员致力于开发一种动态城市交通场景数字孪生建模方法,能够模拟真实的城市交通场景,通过在虚拟环境中进行大规模的仿真测试,可以显著减少对实车路测的需求,从而降低控制算法的开发成本,并提高控制算法的开发效率。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何模拟真实的城市交通场景,减少实车路测。
2、为实现上述目的,本发明提供了一种动态城市交通场景数字孪生建模方法,所述方法包括以下步骤:
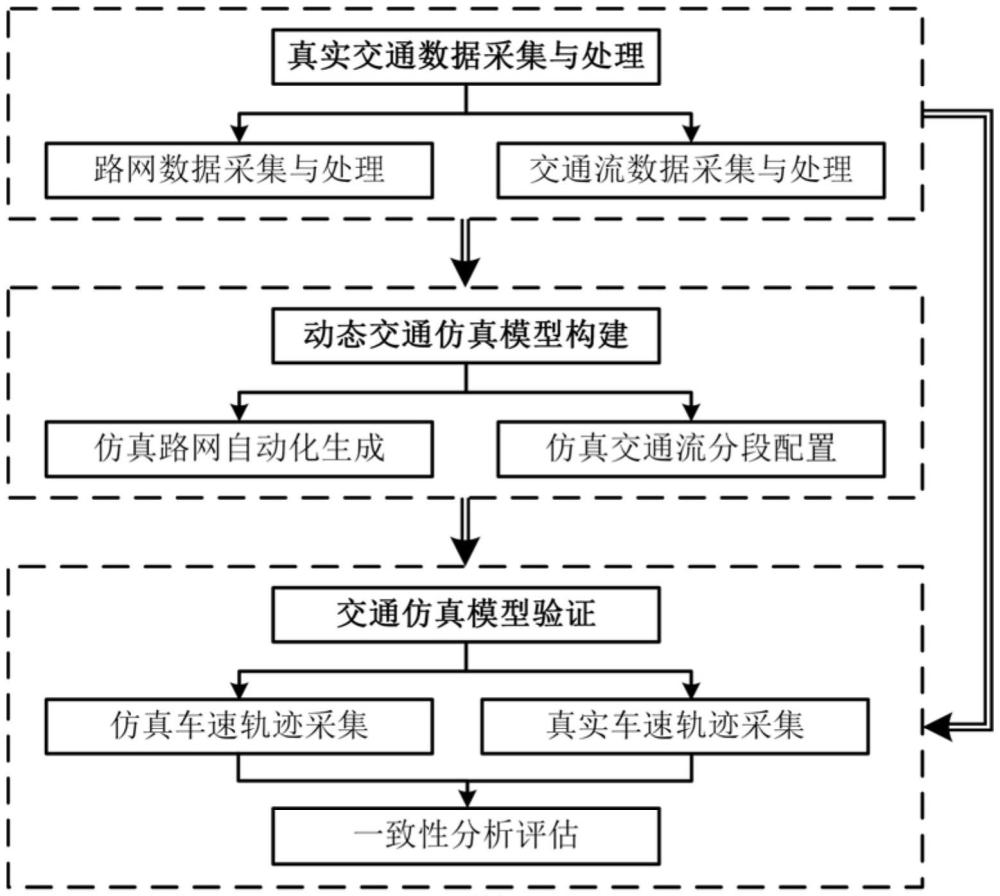
3、步骤1、通过地图服务商,获取真实交通场景数据;
4、步骤2、基于sumo,根据真实交通场景数据构建动态交通仿真模型;
5、步骤3、采集同一行驶路线下的仿真车速轨迹与真实车速轨迹,对所述动态交通仿真模型与真实交通场景的一致性进行验证。
6、进一步地,所述交通场景数据包括路网数据、交通流数据集;所述路网数据包括交叉口位置、红绿灯位置、道路长度宽度、道路车辆车道数目、道路限速;所述交通流数据集反映车辆行驶路线车流的速度分布和变化情况。
7、进一步地,所述路网数据的获取方式为:
8、通过地图服务商的在线地图平台选择包含行驶路线的城市区域,导出原始osm数据文件;
9、通过josm编辑器批量过滤所述原始osm数据文件中与城市道路无关的环境信息,得到过滤后的原始osm数据文件;
10、对所述过滤后的原始osm数据文件进行简化,保留沿行驶路线上的车道信息、路口信息、限速信息以及与行驶路线相交的道路信息,得到简化后的osm数据文件,该osm数据文件为所述路网数据。
11、进一步地,所述交通流数据的获取方式为:
12、通过arcgis软件将车辆的行驶路线根据n个途经点划分为n+1个子路段,得到每一个路径点的经纬度坐标;
13、调用驾车路线规划服务api获取每个子路段的长度与预期通行时间;
14、计算某一时刻行驶路线各子路段的平均车速数据;
15、通过定期采集,将采集的数据组合为交通流数据集。
16、进一步地,所述步骤2还包括:
17、步骤2.1、自动化生成仿真路网;
18、步骤2.2、分段配置仿真交通流。
19、进一步地,所述步骤2.1还包括:
20、步骤2.1.1、运行路网自动转化批处理文件,调用netconvert工具将得到的所述osm数据文件转换为使用sumo网络建模所需要的路网文件.net.xml;
21、步骤2.1.2、根据在线全景地图在netedit编辑器中对自动生成的仿真路网进行查验校准。
22、进一步地,所述步骤2.2还包括:
23、步骤2.2.1、按照现实道路分段将路网分为n段,基于所采集的交通流数据集,计算划分好的每段道路的真实车速均值与标准差;
24、步骤2.2.2、根据计算的真实车速均值与标准差设置第n段道路的交通流初始参数,其中,n=1,2,3…n;
25、步骤2.2.3、运行交通仿真模型,记录仿真过程中通过该段道路的车辆车速数据;
26、步骤2.2.4、将仿真记录的车速数据与所采集的真实车速数据进行双样本k-s检验,显著性水平为α=0.05,若k-s检验计算得到的概率p值大于α,则第n段道路的交通流参数配置完毕,进行所述步骤2.2.5;若k-s检验计算得到的概率p值小于等于α,则对第n段道路的交通流参数进行微调后返回所述步骤2.2.3;
27、步骤2.2.5、当n≤n时,令n=n+1,返回所述步骤2.2.2;当n>n时,表明已经完成仿真场景的交通流参数设计。
28、进一步地,在所述步骤3中,采集仿真车速轨迹包括:
29、在动态交通仿真模型中规划一条特定行驶路线,配置一辆测试车辆按照特定行驶路线行驶;
30、为测试车辆设定不同的出发时间,运行动态交通仿真模型,获取测试车辆在特定行驶路线上的实时车速轨迹数据,得到仿真车速轨迹。
31、进一步地,在所述步骤3中,通过设置不同的出发时间,根据车速数据集模拟车辆的真实车速轨迹,如下式:
32、vact(t)=fdataset(s(vact(t),t),t)
33、其中,vact(t)为真实车速轨迹;t为车辆行驶的时间;fdataset为离线采集的车速数据集;s(vact(t),t)为车辆行驶的距离;
34、
35、进一步地,所述车速数据集从所述交通流数据集中获取。
36、与现有技术相比,本发明至少具有如下有益技术效果:
37、1、本发明通过导航服务获取某段道路的长度与车辆预期通行时间,进而计算得到道路上车流的平均速度,能够更加方便地获取交通流数据,省时省力,减少人工成本;
38、2、本发明能够自动生成路网文件,减少sumo交通仿真模型路网的创建过程;
39、3、本发明提出的交通流参数分段设置法,降低了sumo交通仿真模型的交通流参数调整难度;
40、4、本发明无需实车实验便可获取真实车辆行驶的车速轨迹,能够降低成本。
41、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290023.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表