一种基于肠曲走向模拟的回流灌肠路径规划方法
- 国知局
- 2024-09-11 14:17:29
本发明涉及医学成像,具体涉及一种基于肠曲走向模拟的回流灌肠路径规划方法。
背景技术:
1、经由肛门插入灌肠管,通过灌肠管往直肠内灌入通便剂后,可以刺激肠道蠕动,促进粪便排出体外,起到清洁肠道的效果,另外,将特定药物通过灌肠管灌入肠道内,还可以治疗溃疡性结肠炎、放射性肠炎、盆腔炎等疾病,灌肠的方法简单分为保留灌肠和不保留灌肠,保留灌肠是以少量液体和药物混合,插入直肠壶腹部15~20cm;不保留灌肠一般插入直肠7~10cm,分次灌洗;针对某些上消化道疾病手术禁食或进食困难的患者,为了供给营养、水分等,可以采用点滴灌肠的方法,灌肠管插入肛门20~25cm,接灌肠器缓缓滴入肠道内;除此之外,盆腔炎患者进行灌肠治疗时,灌肠管的深度一般在20-30cm,利用灌肠将肠道内的内容物排出体外。
2、诸如上述等各种情况可知,根据肠道内部病灶位置不同,对应采用的灌肠方法、灌肠管插管深度均存在区别。
3、在医疗操作规范中,灌肠管主要是依据肠道走向逐渐深入肠道内部,肠道路径弯曲,灌肠管自身形状无法完全与肠道走向一致,灌肠管与肠道壁接触、挤压,受肠道壁的引导前进,灌肠管可能会损伤肠道组织,导致肠道出血或肠道穿孔,为解决上述问题,现有技术中存在根据肠曲走向计算获得最优路径的方式,在对肠道内部进行灌肠、肠镜等操作中为操作提供指示作用,降低管道或肠镜结构造成肠子破裂的情况的发生概率。
4、现有技术中最优路径通常只是限定路径与肠道壁两侧之间保持安全距离,在灌肠实际操作过程中,肠道病灶部位不定,病灶区过于深入肠道内部的情况下,灌肠路径终点无法确定,需要灌肠管反复调整位置以正对病灶区进行直接灌冲,但反复调整的过程会对肠道本身造成破坏,因此,现有技术的灌肠路径无法同时满足深入肠道内靠近并正对病灶部位、避免对肠道造成损坏的条件。
技术实现思路
1、为此,本发明提供一种基于肠曲走向模拟的回流灌肠路径规划方法,有效的解决了现有技术中的灌肠过程无法同时满足深入肠道内靠近病灶部位、避免对肠道造成损坏的条件的问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:一种基于肠曲走向模拟的回流灌肠路径规划方法,包括:
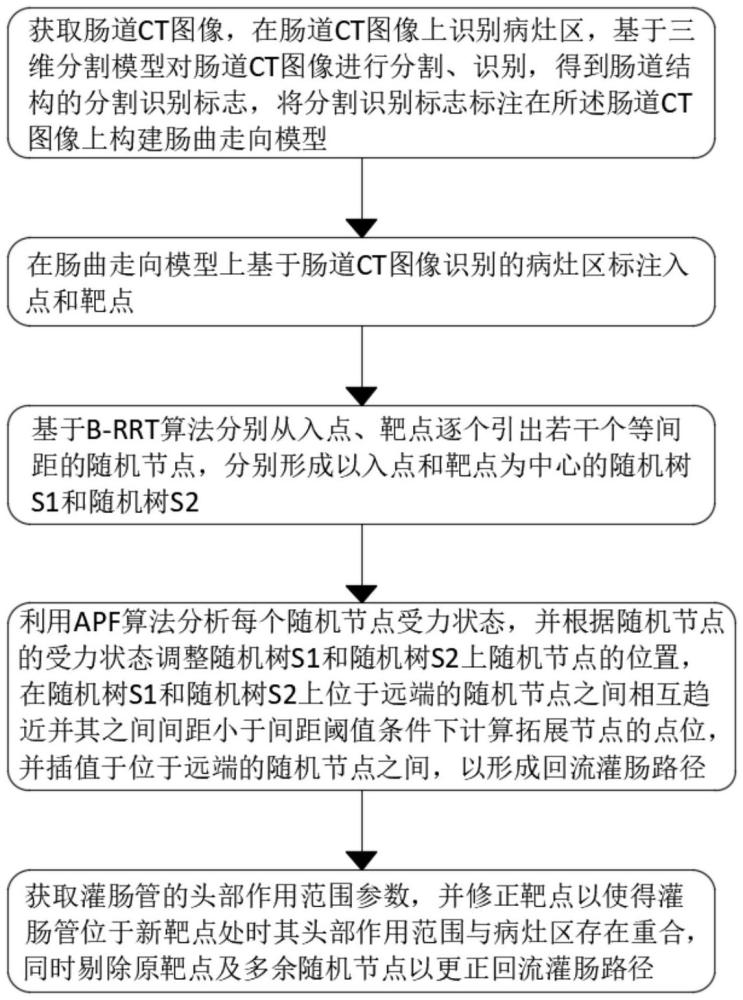
3、获取肠道ct图像,在所述肠道ct图像上识别病灶区,基于三维分割模型对所述肠道ct图像进行分割、识别,得到肠道结构的分割识别标志,将所述分割识别标志标注在所述肠道ct图像上构建肠曲走向模型;
4、在所述肠曲走向模型上基于肠道ct图像识别的病灶区标注入点和靶点;
5、基于b-rrt算法分别从入点、靶点逐个引出若干个等间距的随机节点,分别形成以入点和靶点为中心的随机树s1和随机树s2;
6、利用apf算法分析每个随机节点受力状态,并根据所述随机节点的受力状态调整随机树s1和随机树s2上随机节点的位置,在随机树s1和随机树s2上位于远端的随机节点之间相互趋近并其之间间距小于间距阈值条件下计算拓展节点的点位,并插值于位于远端的随机节点之间,以形成回流灌肠路径;
7、获取灌肠管的头部作用范围参数,并修正靶点以使得灌肠管位于新靶点处时其头部作用范围与病灶区存在重合,同时剔除原靶点及多余随机节点以更正回流灌肠路径。
8、进一步地,
9、所述随机树s1以所述入点为起点,由所述入点逐个引出第一随机节点;
10、所述随机树s2以所述靶点为起点,由所述靶点逐个引出第二随机节点;
11、其中,相互趋近的所述第一随机节点和所述第二随机节点之间插入所述拓展节点,且通过所述拓展节点连接,相邻所述第一随机节点之间的第一节点间距均相等,相邻所述第二随机节点之间的第二节点间距均相等,所述第一节点间距、所述第二节点间距相等。
12、进一步地,
13、每一个所述第一随机节点、所述第二随机节点和所述拓展节点处均满足:至少一维度面内受力平衡。
14、进一步地,
15、根据所述随机节点的受力状态调整随机树s1和随机树s2上的随机节点位置具体包括以下步骤:
16、分别以入点、靶点为中心,第一节点间距为半径,得到第一个预估节点集;
17、基于引力场函数计算每个预估节点的引力维度面受力情况;
18、基于斥力场函数计算每个预估节点的斥力维度面受力情况;
19、在预估节点集中选取同时满足以下条件的预估节点作为新的第一随机节点和第二随机节点:
20、(a)预估节点处于所述肠曲走向模型内;
21、(b)预估节点的斥力维度面受力处于平衡状态;
22、(c)预估节点的引力维度面受力相较于上一随机节点减小;
23、分别以第一个新的第一随机节点、第二随机节点为中心,第一节点间距为半径,得到第二个预估节点集,并重复上述步骤,逐个延伸出新的第一随机节点、第二随机节点。
24、进一步地,
25、引力场函数定义为:
26、
27、
28、其中,q表示预估节点,u1(q)表示预估节点的引力场,k1为apf中引力场增益系数,ρ1为随机树s1上预估节点到靶点的距离或随机树s2上预估节点到入点的距离,f1(q)为预估节点的引力维度面受力,为梯度;
29、斥力场函数定义为:
30、
31、
32、其中,u2(q)表示预估节点的斥力场,ρ0为肠道壁的影响距离,ρ0大于肠道内宽度,ρ2为预估节点和肠道壁之间的间距,k2为斥力尺度因子,f2(q)为预估节点的斥力维度面受力,为梯度。
33、进一步地,
34、在随机树s1和随机树s2上位于远端的随机节点之间相互趋近并其之间间距小于间距阈值条件下计算拓展节点的点位,并插值于位于远端的随机节点之间,以形成回流灌肠路径,具体包括以下步骤:
35、获取随机树s1和随机树s2上位于远端且完成调整的第一随机节点和第二随机节点;
36、计算第一随机节点和第二随机节点间的实时节点间距,在实时节点间距之间小于间距阈值时在其之间建立连接线;
37、检测连接线与肠道壁是否产生碰撞;
38、若有碰撞,则继续随机树s1和随机树s2下一随机节点的延伸,并重复上述步骤,若无碰撞,则得到连接线无碰撞的第一随机节点x1和第二随机节点x2;
39、计算第一随机节点x1和第二随机节点x2之间的间距;
40、若其间距小于第一节点间距,则直接连接第一随机节点x1和第二随机节点x2,形成回流灌肠路径;
41、若其间距大于第一节点间距,则计算拓展节点的点位并插值于远端随机节点之间,以形成回流灌肠路径。
42、进一步地,
43、所述拓展节点的点位的计算过程包括:
44、连接第一随机节点x1、第二随机节点x2,穿过连接线中点且垂直于连接线作节点平面;
45、基于斥力场函数计算节点平面内所有点的斥力维度面受力情况;
46、筛选出斥力维度面受力处于平衡状态的点,作为拓展节点,将拓展节点与第一随机节点x1、第二随机节点x2连线;
47、其中,所述拓展节点点位与第一随机节点x1、第二随机节点x2之间的间距相等。
48、进一步地,
49、获取灌肠管的头部作用范围参数,并修正靶点以使得灌肠管位于新靶点处时其头部作用范围与病灶区存在重合,同时剔除原靶点及多余随机节点以更正回流灌肠路径,具体包括以下步骤:
50、自靶点开始,依次判断将灌肠管头部置于靶点后若干个第二随机节点处时,病灶区是否处于灌肠管头部的作用范围内;
51、将满足条件的第二随机节点,组合形成更正节点集;
52、选取更正节点集中距离靶点最远的第二随机节点作为新靶点;
53、剔除原靶点及多余随机节点,以更正回流灌肠路径。
54、其中,所述更正节点集内的所述第二随机节点应当满足条件:将灌肠管头部置于第二随机节点处时,病灶区处于灌肠管头部的作用范围内。
55、进一步地,
56、肠曲走向模型的构建过程具体包括以下步骤:
57、获取病例库中与待灌肠患者的病灶区域相同的多组肠道ct图像的样本图像数据;
58、构建三维分割深度神经网络,将样本图像数据预处理,将预处理后的样本图像数据作为训练样本数据输入三维分割深度神经网络进行学习,以得到三维分割模型;
59、获取待灌肠患者的肠道ct图像的初步图像数据,对初步图像数据进行预处理,将经预处理后的初步图像数据输入所述三维分隔模型,利用三维分割模型对不同肠道结构进行分割、识别,得到肠道结构的分割识别结果;
60、基于所述分割识别结果和所述初步图像数据构建肠曲走向模型。
61、本发明与现有技术相比较具有如下有益效果:
62、本发明中,获取肠道ct图像,在肠道ct图像上识别病灶区,并构建肠曲走向模型,基于b-rrt算法结合apf算法分别构建远离肠道壁的随机树s1和随机树s2并调整随机树s1和随机树s2上的随机节点的位置,将随机树s1和随机树s2远端通过插值的方式连接得到避免灌肠管与肠道壁发生干涉的回流灌肠路径,回流灌肠路径能够与肠道壁保持一定距离,另外通过灌肠管的头部作用范围和病灶区的位置自动更正回流灌肠路径,以在保证能够灌冲在病灶区的情况下缩短回流灌肠路径,避免路径进一步深入对肠道造成破坏,实现对回流灌肠路径的规划,能够为灌肠管插入过程提供引导和参考,一方面便于灌肠管深入肠道内靠近病灶区域,另一方面减少灌肠管与肠道壁发生干涉导致损伤。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290050.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表