基于封闭试验场数字孪生的整车在环测试系统及方法与流程
- 国知局
- 2024-09-11 14:20:34
本发明涉及汽车检测领域,特别涉及一种基于封闭试验场数字孪生的整车在环测试系统及方法。
背景技术:
1、自动驾驶汽车测试包括模拟仿真测试、封闭试验场测试和实际道路测试。其中,模拟仿真测试包括模型在环、软件在环、硬件在环和整车在环。车辆在环测试是将整车嵌入到虚拟环境中进行测试,主要有基于转毂(底盘测功机)的车辆在环测试和基于场地的车辆在环测试。
2、基于转毂的车辆在环测试,结合环境模拟,在室内可以进行灵活和可重复的测试。但是转毂台架和传感器模拟设备价格昂贵,转向角度受限导致测试场景受限。
3、基于场地的车辆在环测试平台,给真实世界的测试环境中添加虚拟目标物和场景,旨在确保最大可能数量的被测组件真实状态。应用基于场地的车辆在环测试,重点测试和校准自动驾驶功能,但通常忽视对使用的传感器进行检测。因此,对测试数据的有效性和测试结果的一致性存在疑问。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种基于封闭试验场数字孪生的整车在环测试系统及方法,能够保证被测自动驾驶汽车vut的位姿测试数据的准确性和有效性,能够验证整车在环仿真测试结果与实际车辆测试结果的一致性,具有高可置信度。
2、本发明解决其技术问题所采用的技术方案是:
3、一方面,一种基于封闭试验场数字孪生的整车在环测试系统,包括封闭试验场和数字孪生仿真试验场;所述封闭试验场包括静态环境、动态环境、目标物和被测自动驾驶汽车vut;所述封闭试验场内安装有高精定位基站、gnss/ins组合导航系统和v2x云控平台;所述数字孪生仿真试验场包括高精地图和模拟仿真系统;所述模拟仿真系统包括传感器模拟器、交通参与者模拟器、气象环境模拟器和通信插件;
4、所述高精定位基站,包括安装在封闭试验场控制点的全球卫星导航系统接收机,提供网络差分rtk定位功能;
5、所述gnss/ins组合导航系统,融合有全球卫星导航系统定位功能和惯性导航系统定位功能,结合高精定位基站的网络差分定位信号进行定位;与被测自动驾驶汽车相连接输出被测自动驾驶汽车的位姿测试数据;
6、所述v2x云控平台,用于感知静态环境、动态环境、目标物和被测自动驾驶汽车的实时信息;
7、所述高精地图,基于封闭试验场构建;
8、所述模拟仿真系统,融合所述高精地图,通过通信插件连接v2x云控平台,实现封闭试验场的数字孪生;所述交通参与者模拟器用于模拟除被测自动驾驶汽车外的交通参与者;所述气象环境模拟器用于模拟气象环境;所述传感器模拟器用于模拟被测自动驾驶汽车的感知设备;所述模拟仿真系统通过通信插件与所述gnss/ins组合导航系统相连接,以接收被测自动驾驶汽车的位姿测试数据;所述模拟仿真系统通过通信插件与所述被测自动驾驶车辆相连接以输出仿真测试场景数据,并接收被测自动驾驶汽车反馈的车辆控制数据。
9、优选的,所述的基于封闭试验场数字孪生的整车在环测试系统,还包括:服务器;所述服务器与通信插件相连接用于接收被测自动驾驶汽车的位姿测试数据以进行数据一致性分析。
10、优选的,所述静态环境包括道路、标志标牌和障碍物;所述动态环境包括交通信号灯和可变交通标志;所述目标物包括封闭试验场内的交通参与者的物理对象。
11、优选的,所述高精定位基站的rtk定位精度为毫米级;所述gnss/ins组合导航系统,结合高精定位基站的网络差分定位信号进行定位,所达到的定位精度为厘米级。
12、优选的,所述被测自动驾驶汽车的位姿测试数据包括位置、高程、速度和加速度。
13、优选的,基于封闭试验场构建的高精地图具备道路标线、地面标识、交通标志、车道曲率和坡度信息。
14、优选的,所述仿真测试场景数据包括车道线、地面标识、交通参与者和气象环境。
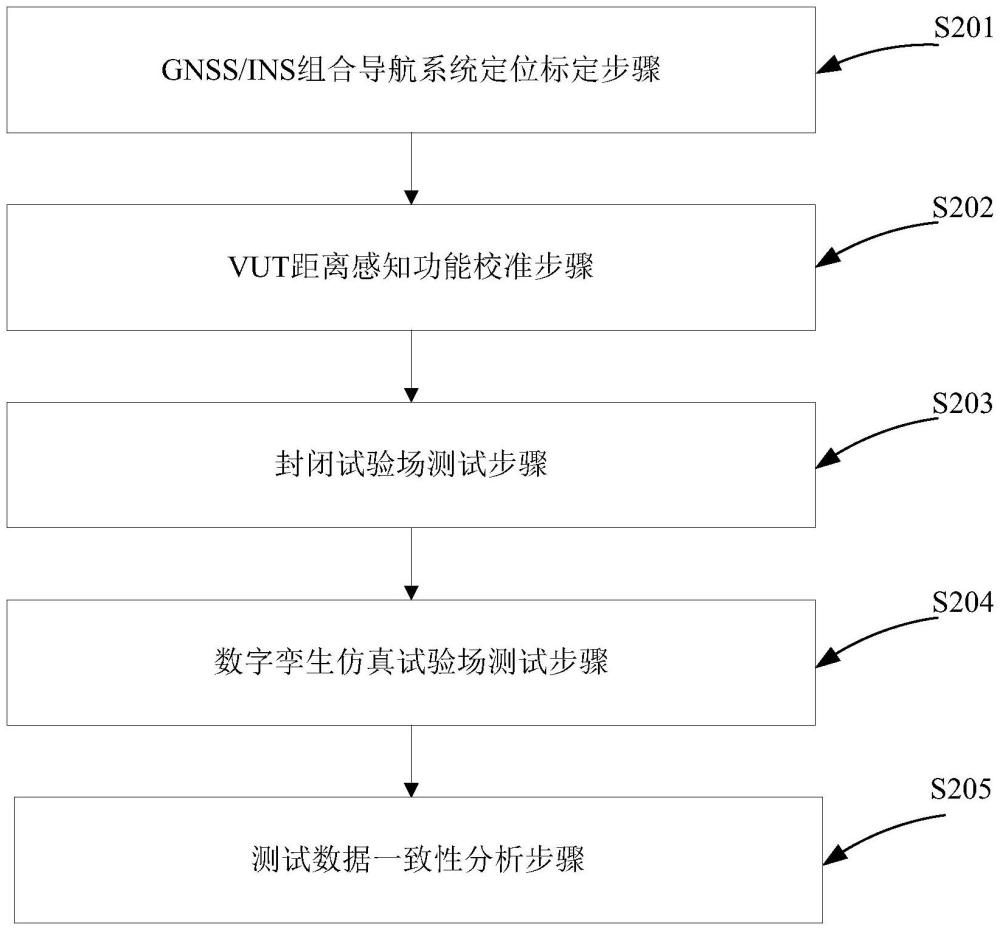
15、另一方面,一种基于封闭试验场数字孪生的整车在环测试方法,包括:
16、gnss/ins组合导航系统定位标定步骤,在封闭试验场对被测自动驾驶汽车开展预设行驶试验,直至利用高精定位基站rtk信号的gnss/ins组合导航系统精度误差达到1cm及以下;
17、vut距离感知功能校准步骤,在封闭试验场的指定测试区域,在感知距离范围内,选取最大感知距离、最小感知距离点位和中间点位,放置目标物,比对被测自动驾驶汽车的感知距离dvut和gnss/ins组合导航系统的感知距离d,基于d和dvut对被测自动驾驶汽车的感知系统进行校准,使其平均误差小于等于10cm;
18、封闭试验场测试步骤,在封闭试验场,结合目标物,搭建自动驾驶功能场地测试场景,开展自动驾驶功能测试,由gnss/ins组合导航系统输出被测自动驾驶汽车的位姿测试数据,车辆控制数据通过can转以太网输出;
19、数字孪生仿真试验场测试步骤,在模拟仿真系统上搭建与封闭场地测试步骤一致的模拟仿真测试场景,关闭被测自动驾驶汽车的感知系统,感知数据由模拟仿真系统的传感器模拟器采集并输出至被测自动驾驶汽车;在封闭试验场行驶,开展自动驾驶功能测试,由gnss/ins组合导航系统输出被测自动驾驶汽车的位姿测试数据,车辆控制数据通过can转以太网输出;
20、测试数据一致性分析步骤,对照封闭试验场测试和数字孪生仿真试验场测试,在服务器上验证测试数据一致性。
21、优选的,使用相关系数分析法和瞬态响应分析法,对封闭试验场测试步骤中的位姿测试数据和数字孪生仿真试验场测试步骤中的位姿测试数据,进行一致性的验证。
22、优选的,所述预设行驶试验包括“8”字行驶试验;所述指定测试区域包括长直道、弯道和坡道测试区域。
23、本发明提供的技术方案带来的有益效果是:
24、(1)本发明使用高精定位基站网络差分信号的gnss/ins组合导航系统,能够采集到厘米级的高精度的测试数据,精度远远高于标准要求的位置精度(0.1m)及速度精度(0.1km/h);模拟仿真系统通过通信插件模块与gnss/ins组合导航系统通信,获取被测自动驾驶汽车的位置、高程、速度和加速度等位姿信息,保证测试数据的准确性及有效性;
25、(2)本发明利用gnss/ins组合导航系统的高精度定位功能,校准被测自动驾驶汽车vut的定位感知能力,使得封闭试验场测试和数字孪生仿真试验场测试的对照组试验中,vut具有近乎相同的感知能力,保证对照试验的可控性;
26、(3)本发明融合封闭试验场高精地图的模拟仿真系统,通过通信插件连接v2x云控平台,能够实现封闭试验场数字孪生,使得封闭试验场测试和数字孪生仿真试验场测试的对照组试验,在可控条件下进行;
27、(4)本发明在进行封闭试验场测试和数字孪生仿真试验场测试时,使被测自动驾驶汽车行驶在摩擦系数一致的封闭试验场上,保证车辆动力学一致,使得对照试验在可控条件下进行;
28、(5)本发明基于相关系数分析法和瞬态响应分析法,对封闭试验场测试步骤中的位姿测试数据和数字孪生仿真试验场测试步骤中的位姿测试数据,进行一致性的验证,验证本发明的在环测试的高可置信度;能够保证在模拟仿真系统中模拟更多虚拟场景(气象环境场景、交通参与者场景等)进行在环测试时,测试结果的准确性及有效性。
29、以下结合附图及实施例对本发明作进一步详细说明,但本发明的一种基于封闭试验场数字孪生的整车在环测试系统和方法不局限于实施例。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。