一种模拟自动装瓶的教学平台的制作方法
- 国知局
- 2024-09-11 14:21:11
本发明涉及实验教学,具体涉及一种模拟自动装瓶的教学平台。
背景技术:
1、目前的自动化装瓶教学设计均以单纯理论验证为主流,以编程练习,控制应用为主,教学器械中实际工业控制元素偏少,无法模拟出工业中的完整的装瓶工作流程,学员无法切身感受真实的操作环境,或者无法直观地观察通过编程控制的设备是如何运行的,人与设备的交互较少,缺少系统维护与人为故障设置检测及排除的训练功能,训练效果不理想。
技术实现思路
1、为了解决背景技术存在的技术问题,本发明提出的一种模拟自动装瓶的教学平台。
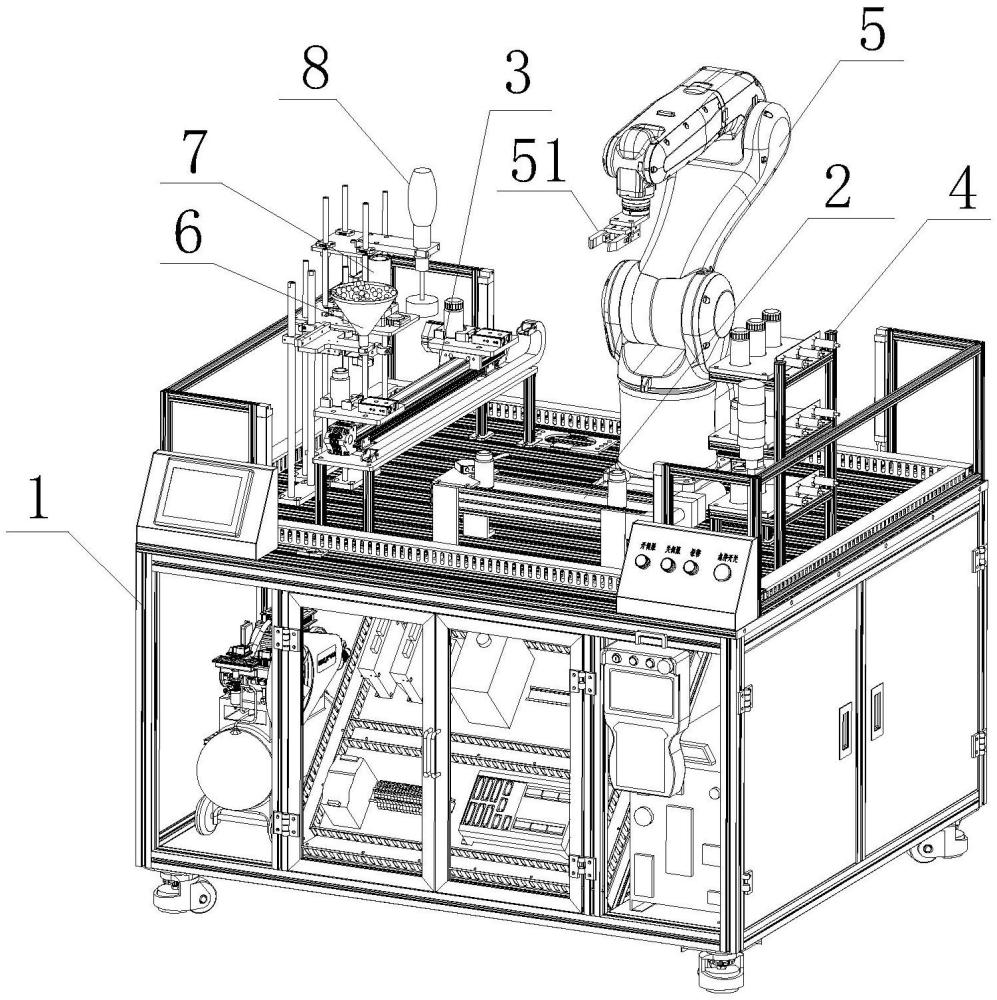
2、本发明提出的一种模拟自动装瓶的教学平台,包括:机台,机台上设置有药瓶传输单元、药瓶流转单元、仓储单元、工业机器人、药丸上料单元、瓶盖上料单元和拧瓶盖单元,其中:
3、仓储单元用于供药瓶排列放置;药瓶传输单元用于输送空药瓶;药瓶流转单元用于运载空药瓶依次穿过药丸上料单元、瓶盖上料单元、及拧瓶盖单元;
4、药丸上料单元用于向空药瓶内注入药丸;瓶盖上料单元用于在药瓶上加盖瓶盖;拧瓶盖单元用于将瓶盖旋紧;
5、工业机器人用于在仓储单元、药瓶传输单元、以及药瓶流转单元之间的转移药瓶。
6、优选地,仓储单元包括若干分层设置的放置板和设置在放置板上以供药瓶放入并限制药瓶晃动的限位槽。
7、优选地,每个限位槽的侧部均设有用于检测该限位槽处是否放置有药瓶的第一传感器。
8、优选地,药瓶传输单元包括输送带和驱动输送带传输的第一驱动机构。
9、优选地,输送带的输出端设有阻挡块,阻挡块具有与药瓶匹配的卡槽。
10、优选地,阻挡块上设有用于检测卡槽内是否有药瓶的第二传感器,工业机器人在第二传感器检测到卡槽内有药瓶时,将卡槽内的药瓶转移至药瓶流转单元。
11、优选地,药瓶流转单元包括定位平台、驱动定位定位平台线性移动的第二驱动机构、设置在定位平台的定位夹块与活动夹块、以及与活动夹块连接以驱动活动夹块向固定夹块方向往复移动的第三驱动机构。
12、优选地,工业机器人的端部设有用于夹持作业的的夹具。
13、优选地,药丸上料单元、瓶盖上料单元及拧瓶盖单元依次设置在药瓶流转单元的一侧;药丸上料单元包括第一立架、安装在第一立架上的料斗和控制料斗出料口开合的开关阀;瓶盖上料单元包括第二立架、安装在第二立架上的底托板、安装在底托板上的底座和推料单元、以及安装在底座上的瓶盖存储筒;底座的下端面与底托板之间具有过料通道,瓶盖存储筒的下端贯通底座以与过料通道导通,瓶盖存储筒的顶端开放以形成放料口;底托板上且位于过料通道的一端设有落料口和位于落料口远离过料通道一侧的限位挡块;推料单元位于过料通道的另一端,其包括推杆和用于驱动推杆向落料口方向伸缩的第四驱动机构;拧瓶盖单元包括套盖、及用于驱动套盖旋转的第五驱动机构和用于驱动套盖上下运动的第六驱动机构。
14、优选地,套盖的侧壁至少开设有三个由其下端口向上延伸的纵向切槽,三个纵向切槽周向均布,且每个纵向切槽内均设有活动条,活动条呈倾斜状态,其下端延伸至套盖的下方的外侧,其上端位于套盖的内侧,其中部设有销轴,销轴的两端分别与纵向切槽两侧侧壁连接,销轴上安装有与活动条抵靠以限制活动条转动角度的扭簧。
15、优选地,拧瓶盖单元还包括第三立架、安装在第三立架上的安装座,第五驱动机构安装在安装座上并与套盖连接,第六驱动机构与安装座连接以驱动安装座在第三立架上竖直滑动。
16、优选地,推料单元还包括水平设置的挡板,挡板的一端具有垂直向下的下延边,其另一端具有倾斜向上的上延边;推杆位于挡板的下方,其顶出端与下延边固定。
17、优选地,机台的台面由若干根带槽的铝型材铺设而成;药瓶传输单元、药瓶流转单元、仓储单元、工业机器人、药丸上料单元、瓶盖上料单元、以及拧瓶盖单元均分别设有地脚块,各地脚块均分别通过螺纹紧固件紧固于于相应的铝型材上以分别形成药瓶传输单元、药瓶流转单元、仓储单元、工业机器人、药丸上料单元、瓶盖上料单元、以及拧瓶盖单元在机台上的可拆卸装配。
18、优选地,机台内部设有用于放置相应电气设备的设备室,设备室内设有照明灯,设备室的一侧侧面为能够开关的门板结构,且该门板由透明材料制成。
19、本发明中,通过在机台上设置有药瓶传输单元、药瓶流转单元、仓储单元、工业机器人、药丸上料单元、瓶盖上料单元和拧瓶盖单元,仓储单元用于存放药瓶;药瓶传输单元用于输送空药瓶;药瓶流转单元用于运载空药瓶依次穿过药丸上料单元、瓶盖上料单元、及拧瓶盖单元;药丸上料单元用于向空药瓶内注入药丸;瓶盖上料单元用于在药瓶上加盖瓶盖;拧瓶盖单元用于将瓶盖旋紧;工业机器人用于将仓储单元上的空药瓶转移至药瓶传输单元以由药瓶传输单元进行空药瓶的输送,并将药瓶传输传输单元上的空药瓶转移至药瓶流转单元以由将药瓶流转单元载着空药瓶依次穿过药丸上料单元、瓶盖上料单元、及拧瓶盖单元,将完成装药、上盖的药瓶由药瓶流转单元转移至仓储单元进行存储。通过该教学平台结合书本上的知识点来向学生讲解自动装瓶流程,以使得学生能够直观的观察装瓶的各个工艺过程,真正的掌握知识点。此外,该教学平台为模块化设计,各单元可拆卸和移动,能够灵活调节。
技术特征:1.一种模拟自动装瓶的教学平台,其特征在于,包括:机台(1),机台(1)上设置有药瓶传输单元(2)、药瓶流转单元(3)、仓储单元(4)、工业机器人(5)、药丸上料单元(6)、瓶盖上料单元(7)和拧瓶盖单元(8),其中:
2.根据权利要求1所述的模拟自动装瓶的教学平台,其特征在于,仓储单元(4)包括若干分层设置的放置板(41)和设置在放置板(41)上以供药瓶放入并限制药瓶晃动的限位槽(42);
3.根据权利要求1所述的模拟自动装瓶的教学平台,其特征在于,药瓶传输单元(2)包括输送带和驱动输送带传输的第一驱动机构;
4.根据权利要求1所述的模拟自动装瓶的教学平台,其特征在于,药瓶流转单元(3)包括定位平台(31)、驱动定位定位平台(31)线性移动的第二驱动机构、设置在定位平台(31)的定位夹块(32)与活动夹块(33)、以及与活动夹块(33)连接以驱动活动夹块(33)向固定夹块方向往复移动的第三驱动机构(34)。
5.根据权利要求1所述的模拟自动装瓶的教学平台,其特征在于,工业机器人(5)的端部设有用于夹持作业的的夹具(51)。
6.根据权利要求1所述的模拟自动装瓶的教学平台,其特征在于,药丸上料单元(6)、瓶盖上料单元(7)及拧瓶盖单元(8)依次设置在药瓶流转单元(3)的一侧;药丸上料单元(6)包括第一立架(61)、安装在第一立架(61)上的料斗(62)和控制料斗(62)出料口开合的开关阀(63);瓶盖上料单元(7)包括第二立架(71)、安装在第二立架(71)上的底托板(72)、安装在底托板(72)上的底座(73)和推料单元(74)、以及安装在底座(73)上的瓶盖存储筒(75);底座(73)的下端面与底托板(72)之间具有过料通道,瓶盖存储筒(75)的下端贯通底座(73)以与过料通道导通,瓶盖存储筒(75)的顶端开放以形成放料口;底托板(72)上且位于过料通道的一端设有落料口和位于落料口远离过料通道一侧的限位挡块(76);推料单元(74)位于过料通道的另一端,其包括推杆和用于驱动推杆向落料口方向伸缩的第四驱动机构;拧瓶盖单元(8)包括套盖(81)、及用于驱动套盖(81)旋转的第五驱动机构(82)和用于驱动套盖(81)上下运动的第六驱动机构(83)。
7.根据权利要求6所述的模拟自动装瓶的教学平台,其特征在于,套盖(81)的侧壁至少开设有三个由其下端口向上延伸的纵向切槽,三个纵向切槽周向均布,且每个纵向切槽内均设有活动条(11),活动条(11)呈倾斜状态,其下端延伸至套盖(81)的下方的外侧,其上端位于套盖(81)的内侧,其中部设有销轴,销轴的两端分别与纵向切槽两侧侧壁连接,销轴上安装有与活动条(11)抵靠以限制活动条(11)转动角度的扭簧。
8.根据权利要求6所述的模拟自动装瓶的教学平台,其特征在于,拧瓶盖单元(8)还包括第三立架(84)、安装在第三立架(84)上的安装座(85),第五驱动机构(82)安装在安装座(85)上并与套盖(81)连接,第六驱动机构(83)与安装座(85)连接以驱动安装座(85)在第三立架(84)上竖直滑动。
9.根据权利要求6所述的模拟自动装瓶的教学平台,其特征在于,推料单元(74)还包括水平设置的挡板(741),挡板(741)的一端具有垂直向下的下延边,其另一端具有倾斜向上的上延边;推杆位于挡板(741)的下方,其顶出端与下延边固定。
10.根据权利要求1-9中任一项所述的模拟自动装瓶的教学平台,其特征在于,机台(1)的台面由若干根带槽的铝型材铺设而成;药瓶传输单元(2)、药瓶流转单元(3)、仓储单元(4)、工业机器人(5)、药丸上料单元(6)、瓶盖上料单元(7)、以及拧瓶盖单元(8)均分别设有地脚块,各地脚块均分别通过螺纹紧固件紧固于于相应的铝型材上以分别形成药瓶传输单元(2)、药瓶流转单元(3)、仓储单元(4)、工业机器人(5)、药丸上料单元(6)、瓶盖上料单元(7)、以及拧瓶盖单元(8)在机台(1)上的可拆卸装配;
技术总结本发明提出了一种模拟自动装瓶的教学平台,包括:机台,机台上设置有药瓶传输单元、药瓶流转单元、仓储单元、工业机器人、药丸上料单元、瓶盖上料单元和拧瓶盖单元,其中:仓储单元用于供药瓶排列放置;药瓶传输单元用于输送空药瓶;药瓶流转单元用于运载空药瓶依次穿过药丸上料单元、瓶盖上料单元、及拧瓶盖单元;药丸上料单元用于向空药瓶内注入药丸;瓶盖上料单元用于在药瓶上加盖瓶盖;拧瓶盖单元用于将瓶盖旋紧;工业机器人用于在仓储单元、药瓶传输单元、以及药瓶流转单元之间的转移药瓶。通过该教学平台使得学生能够直观的观察装瓶过程,且该教学平台为模块化设计,各单元可拆卸和移动,能够灵活调节。技术研发人员:汪波,丁运峰,任伟,束明智,盛艳,武凯,于晓东受保护的技术使用者:芜湖固高自动化技术有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。