路口场景变更感知的全景图像自适应更新方法与流程
- 国知局
- 2024-09-11 14:22:53
本发明属于智慧交通控制,涉及路口场景变更感知的全景图像自适应更新方法。
背景技术:
1、在城市道路交通管理中,路口的场景变更是一个常见的问题,需要进行及时、准确的感知和处理。路口的场景变更一般包括路口施工、道路封闭、车道划分调整、交通管制或人工接管等,这些变更会导致交通流量发生改变,行车路线调整以及交通事故风险的增加。
2、传统的交通监测系统主要依赖于各种传感器和交通信号灯等设备来收集数据并监测交通情况。然而,这些系统往往只关注交通流量和行驶速度等基本信息,对于路口变更事件的感知能力相对较弱,无法准确地检测到路口发生的施工变更、交警人工接管等异常事件。
3、现有的技术中,全景观测技术被广泛应用于城市交通管理中。这种技术可以通过拍摄全景观图像来获取路口的全方位信息,包括车辆、行人、交通信号灯状态、施工区域等。全景观测技术利用高精度的摄像头和图像处理技术,可以实时获取路口的图像信息,并将其转化为数字化信息进行存储和分析。通过对这些图像进行分析和处理,可以提取出路口的各种交通信息,如车辆、行人、交通信号灯状态等。
4、然而,现有的全景观图像更新方法往往依赖于预设的规则或固定的时间间隔来进行图像更新,这种方法虽然可以满足基本的监测需求,但无法适应路口场景的实时变化。例如,当路口发生施工变更时,如果图像更新时间较长,就无法及时感知到施工区域的变化,导致交通管理者无法做出及时的应对措施。
技术实现思路
1、针对现有技术的不足,本发明提出了一种路口场景变更感知的全景图像自适应更新方法,该方法可以提高路口场景变更的感知能力,为交通管理者提供更加及时、准确的信息,以制定更加有效的交通管理策略。同时,该方法还可以实时监测路口的交通情况,及时发现异常情况和交通事故等,有助于提高城市道路交通的安全性和顺畅性。
2、本发明的技术方案是这样实现的:
3、路口场景变更感知的全景图像自适应更新方法,包括
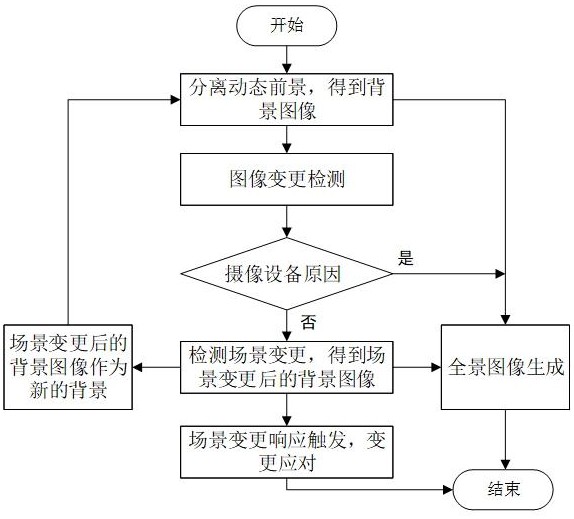
4、步骤1、分离帧图像动态前景,对分离动态前景后的图像进行全景图像的生成以及上传;
5、将视频图像离散为帧图像,对帧图像进行灰度处理,得到灰度图像集合p={p1,p2,......pn};
6、对于灰度图像集合p的每个图像的像素点p(x,y),通过混合高斯模型公式计算像素点p(x,y)在混合高斯模型中的概率分布;其中,p(i(x, y, t))表示像素点(x, y)在混合高斯模型中的概率分布,μt和σt分别为高斯模型的均值和方差的参数;
7、对于每个像素点p(x,y),计算其在混合高斯模型中的概率分布p(i(x, y, t));
8、设定阈值t1,用于区分动态前景和背景;如果p(i(x, y, t))<t1,则该像素点视为动态前景;将所有被视为前景的像素点组成前景掩码,其中前景物体被标记为1,其他物体被标记为0;将前景像素点从灰度图像集合p中分离出去,得到干净的灰度背景图像集合,记为历史灰度背景图像集合k={k1,k2,......kn};
9、对历史灰度背景图像进行全景图像的生成,将生成的灰度全景图像逆转换为彩色全景图像并上传;
10、步骤2、感知摄像设备原因造成的图像变更,图像不作处理,仍上传历史全景图像;
11、21、对集合p的每张帧图像的同一位置裁剪边长为a的检验标本;
12、22、截取连续时间t的n张检验标本作为历史检验标本集合pt={pt1,pt2,......ptn};
13、23、截取连续时间t的待处理视频的n张帧图像进行灰度处理,裁剪与历史检验标本相同的待测标本集合为p’={p’1,p’2,......p’n};
14、24、设定ptn为历史检验标本图像的灰度值矩阵,ptn为待测标本图像的灰度值矩阵,ptn(x,y)表示为矩阵ptn的元素,ptn(x’,y’)表示为矩阵ptn的元素,计算pti(x,y)与p’i(x’,y’)对应灰度的差值ai(x,y)=p’i(x’,y’)-pti(x,y),返回灰度值不为0的像素数di;
15、25、以di为元素的矩阵di,设定容值ζ,构造累积差值矩阵mi,累积差值矩阵元素mi(x,y)=max{di(x,y)-ζ,0},得到累积差值矩阵mi,计算累计差值矩阵mi中非0元素数与0元素数的比值记为执行系数δt;
16、26、设定阈值t3,如果δt≥t3,则图像的变更视为摄像设备原因造成的图像变更,图像不作处理,仍上传原历史彩色全景图像;
17、27、如果δt<t3,则图像的变更视为非摄像设备原因造成的图像变更,执行步骤3;
18、步骤3、感知非摄像设备原因造成的图像变更,图像以变更后的分离动态前景的图像进行全景图像的生成以及上传;
19、31、当前时刻图像做动态前景分离后得到灰度背景图像kn+1,灰度背景图像kn+1的像素点kn+1(x, y)与历史灰度背景图像ki∈k的对应像素点ki(x, y),分别计算其在混合高斯模型中的概率分布pkn+1(i(x, y, t))与pki(i(x, y, t));
20、32、设定阈值t2,用于区分变更场景和背景;如果 t1≤ pkn+1(i(x, y, t))<t2,且pki(i(x, y, t))≥t2,则视为像素点kn+1(x, y)位置发生了场景变更;则将灰度背景图像kn+1之后的图像集合视为新的历史灰度背景图像k’={kn+1,kn+2,......k2n},否则,视为该像素位置未发生变更,灰度背景图像kn+1计入原历史灰度背景图像集合中,即k={k1,k2,......kn,kn+1};
21、33、对新的灰度背景图像进行全景图像生成,逆转换为新的彩色全景图像上传覆盖原历史彩色全景图像。
22、步骤4、背景更新,对场景发生变更位置发出预警及提醒;
23、41、截取新的灰度图像集合p’={p’1,p’2,......p’n},通过每一个新的像素点对p’(x,y)对混合高斯模型的参数重新估计,带入模型更新背景;
24、42、根据场景变更判断事件类型和影响范围等因素,触发相应的响应措施。
25、本发明的工作原理及有益效果为:
26、混合高斯背景建模法不仅对复杂场景的适应强,而且能通过自动计算的模型参数来对背景模型调整,检测速度快,且检测准确,容易实现,同时根据新获取的图像,对背景图像参数进行自适应更新,该方法还能够处理光照变化、背景混乱运动的干扰以及长时间的场景变化等。
27、实时感应,逢变上传的场景变更感应模式,节省运算空间,提高响应速度,可以及时感知路口的场景变更事件,使交通管理者能够迅速做出应对措施,避免因施工变更或其他异常事件导致的交通拥堵和延误,这有助于提高城市道路交通的顺畅性,为市民提供更好的出行体验。
技术特征:1.路口场景变更感知的全景图像自适应更新方法,其特征在于,包括
2.根据权利要求1所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,步骤1包括,
3.根据权利要求1所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,步骤2包括
4.根据权利要求1所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,步骤3包括
5.根据权利要求1所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,步骤4包括,
6.根据权利要求2所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,阈值t1是通过分离动态前景和背景的准确率来确定的,需要根据路口红绿灯时长的情况调整阈值t1的选取。
7.根据权利要求3所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,阈值t3是通过是否为摄像设备抖动等原因对图像的变化率度量的一个固定值。
8.根据权利要求3所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,检验标本位置应选取外界变化较少的图像边缘位置作为截取区域。
9.根据权利要求4所述的路口场景变更感知的全景图像自适应更新方法,其特征在于,阈值t2是通过区分场景变更和背景的准确率来确定的,满足t2>t1。
技术总结本发明属于智慧交通控制技术领域,提出了路口场景变更感知的全景图像自适应更新方法,该方法包括:步骤1、分离帧图像动态前景,对分离动态前景后的图像进行全景图像的生成以及上传;步骤2、感知摄像设备原因造成的图像变更,图像不作处理,仍上传历史全景图像;步骤3、感知非摄像设备原因造成的图像变更,图像以变更后的分离动态前景的图像进行全景图像的生成以及上传;步骤4、对场景发生变更位置发出预警及提醒;该方法通过对交通路口静态场景的变更感知,对交通路口施工变更或人工接管控制等异常变化进行实时自动更新;减少了交通参与人员因不能及时获取路口变更信息而导致的交通拥堵甚至交通事故发生的概率。技术研发人员:王士元,王川受保护的技术使用者:维特瑞交通科技有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290488.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表