一种移动机器人精准停靠充电装置及充电方法与流程
- 国知局
- 2024-09-11 14:45:57
本发明涉及机器人充电,具体为一种移动机器人精准停靠充电装置及充电方法。
背景技术:
1、随着机器人技术的不断发展,对机器人的智能性要求也在不断提高,机器人自主精准停靠充电技术是其中的一项挑战,现有的移动机器人一般都使用低压电充电,充电效率慢,若换成高压电,由于停靠精度不高的问题,直接使用高压电接插件会产生用电安全隐患,并对充电插头造成磨损;同时,现有的移动机器人,由于定位和控制误差、以及实际外界干扰的影响,很难做到完美无误差的精准停靠控制,因此在停靠充电时,经常需要停靠多次才可能成功,停靠效率较低;而要保证较高的控制精度,正常情况下需要在控制算法中建立精度更高的动力学模型,但这会增加对硬件的算力要求,不利于控制量产成本,并且对定位精度的要求也会更高。
技术实现思路
1、本发明的目的在于提供一种移动机器人精准停靠充电装置及充电方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种移动机器人精准停靠充电装置,该装置包括:
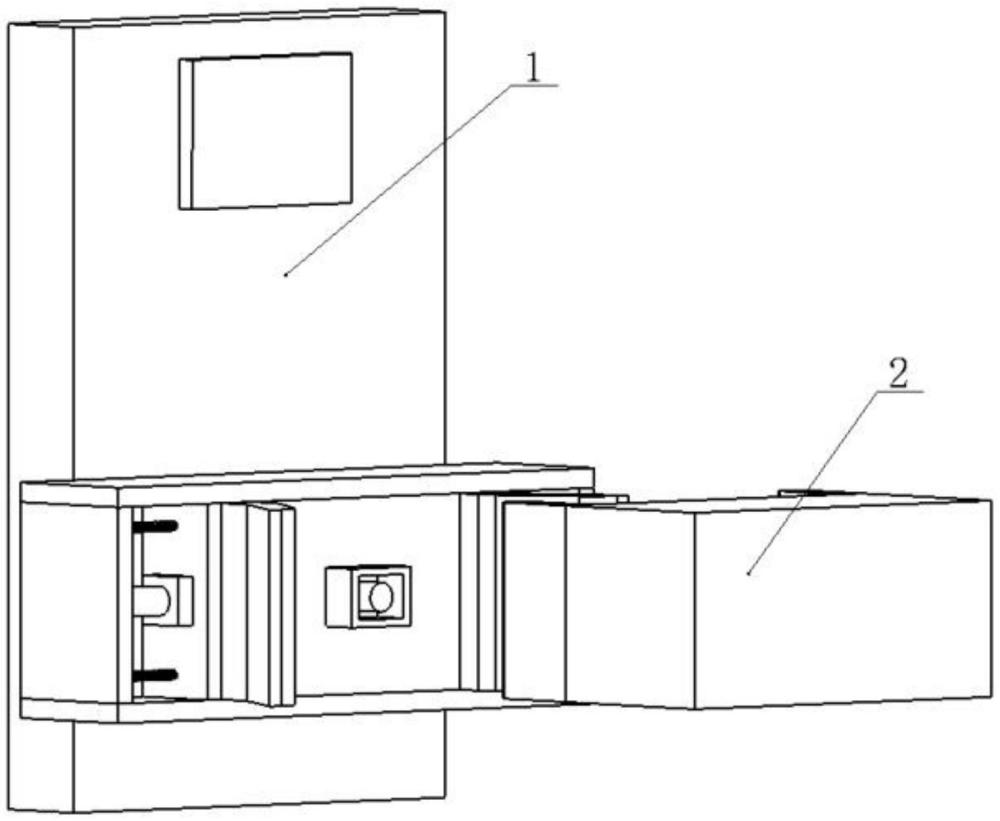
3、充电接口组件,其包括二维码识别板、接口组件安装板、充电接口板、接口导引块、充电接口、接口板滑块、复位弹簧、接口板滑杆和充电接口限位盒,其中,所述二维码识别板固定在充电接口板前视方向的上方位置,所述充电接口限位盒固定在充电接口板前视方向的下方位置,所述充电接口限位盒的垂直中心线与二维码识别板的垂直中心线重合,所述充电接口板的中心为充电接口,两个所述充电接口导引块以左右对称方式安装在充电接口板上,所述复位弹簧分别与充电接口板和充电接口限位盒相连使充电接口板静止时默认处在充电接口限位盒的中间位置,所述接口板滑杆与充电接口限位盒两侧相连,两个接口板滑块装在充电接口板左右两侧,使得充电接口板与接口板滑杆能产生左右相对滑移;
4、充电插头组件,包括充电插头安装板、充电插头保护块、充电插头,两个所述充电插头保护块左右对称固定在充电插头安装板的两侧,所述充电插头安装板则装在移动机器人正前方;
5、单目相机,设于移动机器人上,其安装高度与所述二维码识别板的安装高度相同,所述单目相机竖直中心位置与所述充电插头竖直中心位置重合;以及
6、imu传感器,其安装在移动机器人内部,用于对移动机器人的速度、旋转角度以及位置进行控制。
7、作为一种优选的实施例,所述单目相机的分辨率至少为720p。
8、作为一种优选的实施例,所述imu传感器的频率至少为100hz。
9、作为一种优选的实施例,还包括:机器人电量检测模块,所述机器人电量检测模块负责检测当前电量是否低于需要充电阈值,以及电量是否充满;
10、机器人任务管理模块,负责管理日常工作任务及自动充电任务的切换;
11、自动驾驶系统,包含定位模块,规划模块,控制模块,负责完成机器人的自动驾驶任务,将计算出的控制信号发给底盘执行模块;
12、底盘执行模块包括转向机构和驱动电机等,负责执行自动驾驶系统发来的控制信号;
13、对接检测模块,负责检测充电插头组件是否与充电接口组件成功对接,并给机器人任务管理模块发送是否成功对接的信号。
14、一种移动机器人,其包括上述任一项所述的移动机器人精准停靠充电装置。
15、一种移动机器人精准停靠充电方法,包括如下步骤:
16、s1:机器人电量检测模块到电量低于指定阈值时,会自动触发精准停靠充电任务并通过机器人任务管理模块下发给自动驾驶系统;
17、s2:自动驾驶系统中接收到精准停靠充电任务后,根据已知的充电桩位置信息,将该任务拆解为三阶段:
18、s2.1:第一阶段即自动驾驶模式
19、a:规划模块规划出一条到充电接口前方的实时路径,终点为充电接口组件前方纵向距离2m,横向距离与充电接口对齐的坐标位置,同时将该坐标位置设定为第二阶段的起点;
20、b:控制模块通过运动学模型的mpc模型预测控制算法跟踪该轨迹,进入正常自动驾驶模式终点,并满足终点误差范围,第一阶段完成;
21、s2.2:第二阶段即精准停靠模式
22、c:触发定位模块中的二维码定位模式,获取到二维码定位模式测量出的机器人上方单目相机与充电接口的相对位置信息;
23、d:判断当前位置条件是否符合切换为精准停靠控制器的条件:若不满足,则执行步骤s2.1;满足条件后,根据定位发来的相对位置信息进行控制,将机器人的充电插头对接进充电接口中;
24、e:自动驾驶系统中的控制模块根据定位模块发来的信息判断停靠完成后,给充电对接检测模块发送信号,检查充电插头组件是否与充电接口组件成功对接:若对接成功,则二阶段任务完成,关闭二维码定位模式,并进行充电;若检测未成功,则自动驾驶系统的规划模块会给控制模块发出一条倒车轨迹,执行步骤s2.1;
25、s2.3:第三节阶段为充电完成退出模式
26、机器人电量检测模块检测到充电完成后,给自动驾驶系统发送充电完成的信号,自动驾驶系统的规划模块会规划一条前0.5m与车辆当前航向平行的轨迹给控制模块,控制模块控制车辆直行倒出,机器人任务管理模块再切换成其他任务状态。
27、作为一种优选的实施例,步骤a中所述终点误差范围为车辆离终点前后左右位置偏差15cm以内,角度偏差正负10°以内的位置。
28、作为一种优选的实施例,步骤b中所述精准停靠控制器的条件即当前位置应满足机器人上方单目相机与充电接口的相对横向位置距离在左右20cm以内,相对角度偏差正负10°以内,纵向位置距离在1.5到2.5m以内。
29、作为一种优选的实施例,步骤e中,执行步骤s2.1的次数为三次,执行次数超过三次时,控制模块将暂停执行步骤s2.1,并报给机器人任务管理模块发送警报。
30、与现有技术相比,本发明的有益效果是:
31、1、本发明所述的一种移动机器人精准停靠充电装置,通过充电接口组件与充电插头组件的配合,能够为精准停靠充电方法提供左右横向位置偏差10cm,前后纵向位置偏差5cm,横摆角度偏差2度以内的精准停靠偏差;在精准停靠的对接过程中,充电接口105和充电插头203若没有正好对正,且横向位置偏差和横摆角度偏差在上述的偏差范围内,充电插头保护块202会先与接口导引块104接触,使充电接口板103产生左右滑移,达到精确对接的效果。
32、2、本发明提出的移动机器人精准停靠充电方法能将停靠的左右横向位置偏差和前后纵向位置偏差都控制在5cm以内,角度偏差控制在1°以内,再结合本发明提出的精准停靠充电装置,能大幅提高正常状态下停靠成功率,同时本精准停靠充电方法也具有异常处理机制,能增加整体方案的抗干扰能力,且所述的精准停靠充电装置,在停靠过程中对充电插头进行了引导保护,因此可配置高压电模式,提升充电效率;此外对接时的引导和充电完成直行倒出的方案还能减轻整个充电过程对充电接口的损耗。
技术特征:1.一种移动机器人精准停靠充电装置,其特征在于,该装置包括:
2.根据权利要求1所述的一种移动机器人精准停靠充电装置,其特征在于:所述单目相机的分辨率至少为720p。
3.根据权利要求1所述的一种移动机器人精准停靠充电装置,其特征在于:所述imu传感器的频率至少为100hz。
4.根据权利要求1所述的一种移动机器人精准停靠充电装置,其特征在于,还包括:机器人电量检测模块,所述机器人电路检测模块负责检测当前电量是否低于需要充电阈值,以及电量是否充满;
5.一种移动机器人,其特征在于:其包括权利要求1至4任一项所述的移动机器人精准停靠充电装置。
6.根据权利要求1所述的一种移动机器人精准停靠充电装置及充电方法,其特征在于:所述移动机器人精准停靠充电方法,包括如下步骤:
7.根据权利要求6所述的一种移动机器人精准停靠充电方法,其特征在于:步骤a中所述终点误差范围为车辆离终点前后左右位置偏差15cm以内,角度偏差正负10°以内的位置。
8.根据权利要求6所述的一种移动机器人精准停靠充电方法,其特征在于:步骤b中所述精准停靠控制器的条件即当前位置应满足机器人上方单目相机与充电接口的相对横向位置距离在左右20cm以内,相对角度偏差正负10°以内,纵向位置距离在1.5到2.5m以内。
9.根据权利要求6所述的一种移动机器人精准停靠充电方法,其特征在于:步骤e中,执行步骤s2.1的次数为三次,执行次数超过三次时,控制模块将暂停执行步骤s2.1,并报给机器人任务管理模块发送警报。
技术总结本发明公开了一种移动机器人精准停靠充电装置,该装置包括:充电接口组件、充电插头组件、单目相机、IMU传感器、机器人电量检测模块、机器人任务管理模块、自动驾驶系统、底盘执行模块包括转向机构和驱动电机等,负责执行自动驾驶系统发来的控制信号、对接检测模块。本发明的有益效果是:移动机器人充电对接精准,对接偏差减小;移动机器人精准停靠充电方法能将停靠的左右横向位置偏差和前后纵向位置偏差都控制在5cm以内,角度偏差控制在1°以内,同时本精准停靠充电方法也具有异常处理机制,能增加整体方案的抗干扰能力,且所述的精准停靠充电装置,提升充电效率;此外对接时的引导和充电完成直行倒出的方案还能减轻整个充电过程对充电接口的损耗。技术研发人员:刘杰,李凯,夏泽韬,郑仁杰,叶腾驹,谷祖林,王健,陈俊波受保护的技术使用者:浙江有鹿机器人科技有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292074.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。