移动机器人的制作方法
- 国知局
- 2024-09-11 14:52:49
本发明涉及移动机器人,尤其涉及一种移动机器人。
背景技术:
1、移动机器人可以代替人工在不同的环境中进行作业,例如清洁机器人,可以代替人工在高楼玻璃幕墙上进行清洁工作;喷涂机器人可以对船体或者金属罐表面进行喷漆或除锈工作。此种移动机器人由于各支腿为独立动作,且具有用电或用气设备,需要为支腿提供电源或气源。相关技术中,移动机器人在运动过程中存在外接管线易发生与移动机器人自身或者外部结构缠绕,进而导致行走不畅甚至造成故障。
技术实现思路
1、本发明提供一种移动机器人,用以解决现有技术中移动机器人的管线路布局问题,使管线组件处于捋顺的状态,从而可以有效地防止管线组件缠绕。
2、本发明提供了一种移动机器人,包括:
3、机身;
4、行走组件,所述行走组件沿所述机身可平移,且所述行走组件为多级升降结构,所述行走组件适于带动所述机身升降,以调节所述机身与行走表面之间的距离,所述行走组件上连接有管线组件;
5、理线装置,所述理线装置与所述机身连接,所述理线装置用于限制管线组件位置。
6、根据本发明提供的移动机器人,所述多级升降结构包括电动推杆和剪叉结构中的至少一种。
7、根据本发明提供的移动机器人,所述理线装置为连杆组件,所述连杆组件的一端与所述机身连接,另一端与所述行走组件连接,所述管线组件与所述连杆组件连接。
8、根据本发明提供的移动机器人,所述连杆组件包括多根依次连接的连接杆,任意相邻的两个所述连接杆之间铰接,多根所述连接杆适于跟随所述行走组件折叠或伸展。
9、根据本发明提供的移动机器人,所述连接杆具有中空腔,所述管线组件设于所述中空腔内;
10、或者,所述连接杆上设有安装槽,所述安装槽的开口沿所述连接杆的长度方向延伸,所述管线组件设于所述安装槽内;
11、或者,所述管线组件与所述连接杆的外周壁直接连接。
12、根据本发明提供的移动机器人,任意相邻的两个所述连接杆之间设有弹性件。
13、根据本发明提供的移动机器人,任意相邻的两个所述连接杆之间夹角小于180°。
14、根据本发明提供的移动机器人,所述理线装置包括卷线盘和用于驱动卷线盘转动的动力件,所述卷线盘用于卷绕或释放所述管线组件。
15、根据本发明提供的移动机器人,所述理线装置包括配电导轨和滑动块,所述配电导轨设于所述机身,所述滑动块设于所述行走组件,所述滑动块上设有导电触点,所述导电触点与所述配电导轨电连接,且所述导电触点适于沿所述配电导轨移动。
16、根据本发明提供的移动机器人,所述配电导轨包括主体部和导电部,所述导电部沿所述滑动块的移动方向延伸,所述导电部嵌设于所述主体部上,所述滑动块包裹于所述主体部的外周;
17、所述主体部周向方向上具有首尾依次连接的第一侧壁、第二侧壁、第三侧壁和第四侧壁;
18、所述第一侧壁上设有两个间隔开的导电部,所述第三侧壁上设有两个间隔开的导电部;
19、或者,所述第一侧壁至所述第四侧壁上均设有一个导电部。
20、根据本发明实施例的移动机器人,通过在机身上设置理线装置,以用于整理管线组件,这样当行走组件相对于机身运动时,可以使管线组件处于捋顺的状态,从而可以有效地防止管线组件缠绕,进而可以提升移动机器人行走的灵活性。通过多级升降结构可以调节所述机身与行走表面之间的距离,一方面使移动机器人可以跨越障碍、凹陷,或者上台阶、下台阶;另一方面,可以通过调节多级升降结构以改变机身相对于行走表面的高度避免管线组件与行走表面上的物件或者其他结构勾连,提高移动机器人运动的流畅性和安全性。
技术特征:1.一种移动机器人(100),其特征在于,包括:
2.根据权利要求1所述的移动机器人(100),其特征在于,所述多级升降结构包括电动推杆和剪叉结构中的至少一种。
3.根据权利要求2所述的移动机器人(100),其特征在于,所述理线装置(130)包括配电导轨(161)和滑动块(162),所述配电导轨(161)设于所述机身(110),所述滑动块(162)设于所述行走组件(120),所述滑动块(162)上设有导电触点(163),所述导电触点(163)与所述配电导轨(161)电连接,且所述导电触点(163)适于沿所述配电导轨移动。
4.根据权利要求3所述的移动机器人(100),其特征在于,所述配电导轨包括主体部(164)和导电部(165),所述导电部(165)沿所述滑动块(162)的移动方向延伸,所述导电部(165)嵌设于所述主体部(164)上,所述滑动块(162)包裹于所述主体部(164)的外周;
5.根据权利要求2所述的移动机器人(100),其特征在于,所述理线装置(130)包括卷线盘(151)和用于驱动卷线盘(151)转动的动力件(152),所述卷线盘(151)用于卷绕或释放所述管线组件(170)。
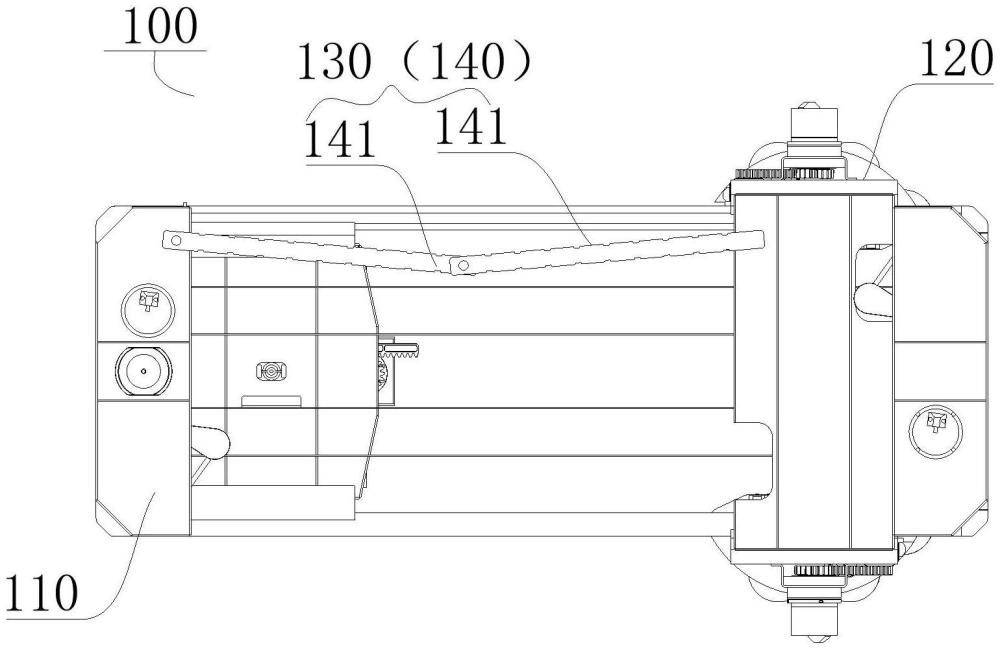
6.根据权利要求2所述的移动机器人(100),其特征在于,所述理线装置(130)为连杆组件(140),所述连杆组件(140)的一端与所述机身(110)连接,另一端与所述行走组件(120)连接,所述管线组件(170)与所述连杆组件(140)连接。
7.根据权利要求6所述的移动机器人(100),其特征在于,所述连杆组件(140)包括多根依次连接的连接杆(141),任意相邻的两个所述连接杆(141)之间铰接,多根所述连接杆(141)适于跟随所述行走组件(120)折叠或伸展。
8.根据权利要求7所述的移动机器人(100),其特征在于,所述连接杆(141)具有中空腔(142),所述管线组件(170)设于所述中空腔(142)内;
9.根据权利要求7所述的移动机器人(100),其特征在于,任意相邻的两个所述连接杆(141)之间设有弹性件。
10.根据权利要求7所述的移动机器人(100),其特征在于,任意相邻的两个所述连接杆(141)之间夹角小于180°。
技术总结本发明提供一种移动机器人。移动机器人包括机身、行走组件和理线装置。行走组件沿机身可平移,且行走组件为多级升降结构,行走组件适于带动机身升降,以调节机身与行走表面之间的距离,行走组件上连接有管线组件。理线装置与机身连接,理线装置用于限制管线组件位置。根据本发明的移动机器人,通过在机身上设置理线装置,以用于整理管线组件,这样当行走组件相对于机身运动时,可以使管线组件处于捋顺的状态,从而可以有效地防止管线组件缠绕,进而可以提升移动机器人行走的灵活性和安全性。技术研发人员:黄俊生受保护的技术使用者:凌度(广东)智能科技发展有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292441.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。