矢量水听器运动阵列DOA估计方法
- 国知局
- 2024-09-11 14:53:19
本发明属于水下目标方位估计领域,涉及一种矢量水听器运动阵列doa估计方法,尤其涉及一种存在阵元角度偏差的矢量水听器运动阵列doa估计方法。
背景技术:
1、海洋发展对人类来说至关重要,由于海水介质中声波传播效果最好,所以人类对海洋的探索离不开水声技术的进步,通过分析水听器阵列接收到的声信息,就可以实现对水下目标的方位估计。无人化与智能化已成为现代战争的重要发展趋势,无人水下航行器(unmanned underwater vehicle,uuv)是探测海洋资源、侦察水下情报和守卫海洋安全的重要装备,在水下对水下目标的方位估计中发挥着不可替代的作用。
2、uuv是一种小型的易布放和回收的水下航行器,可以长时间自主在水下远程航行。uuv的作战用途广、自主性好、机动能力强,可以进行水下搜索和测量、水下战场预测、战场监视分析、水下辅助通信等工作。由于近年水下目标的辐射噪声不断降低,如何提高uuv对水下目标的高分辨探测能力是目前世界各国争相希望解决的技术难题之一。
3、国内的合成孔径技术可以显著提高水下目标检测的分辨率。传统的声纳系统受到波束宽度和信号传播距离的影响,其分辨率通常有限,而合成孔径雷达通过发射宽频带信号并利用接收到的回波信号,结合雷达平台的移动信息,可以重构出高分辨率的图像。合成孔径技术可以用在小的基阵,使其获得几倍甚至几十倍的物理阵的分辨率和阵增益。此外,矢量水听器的空间增益以及分辨率也都极为出色。所以通过矢量水听器阵列技术与合成孔径技术的融合,可以有效提升目标方位估计精度,提高分辨率。国内合成孔径声呐技术于20世纪90年代末开始研究,2000年孙大军等人对合成孔径技术在水声应用中的介质稳定性、运动补偿、测绘速率及成像算法等几个关键问题的研究现状进行综述。从2008年到2010年,etam算法取得了很大的进步。2010年侯云山等人提出一种基于稳健capon波束形成器的合成孔径算法,提高了etam算法抗强干扰的能力。2014年余桐奎等人将合成孔径技术应用于矢量阵中,证明矢量阵合成孔径算法具有更高的目标定位精度、阵增益和方位分辨力,适合低噪声目标的辐射噪声测量。2016年张哲贤等人提出了基于差分进化算法的合成孔径圆阵算法,对合成不等间距阵列的孔径时如何优化阵元排列具有参考价值。2018年田迎泽研究了基于小平台的矢量阵探测方法,对合成孔径算法和虚拟阵元技术进行性能分析,给出非理想条件对合成孔径算法性能的影响。
4、由于uuv在水下运动具有不确定性,很难保证合成孔径时完全在同一水平面上运动,因此会在合成孔径时给各个阵元带来一致的角度偏差,而且矢量水听器内含振速传感器,在安装矢量水听器阵列时,难以保证各个阵元的振速传感器在x轴和y轴的振速轴指向同一方向,会给各个阵元带来随机的轴向偏差。这两种情况带来的阵元角度偏差,导致基于动平台的矢量水听器阵列探测性能有所下降。
技术实现思路
1、为了解决背景技术中存在的上述技术问题,本发明提供了一种可有效提高估计精度的矢量水听器运动阵列doa估计方法。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种矢量水听器运动阵列doa估计方法,其特征在于:所述矢量水听器运动阵列doa估计方法包括以下步骤:
4、1)获取阵元角度偏差矩阵并对阵元角度偏差矩阵进行粗估计;
5、2)对步骤1)所得到的阵元角度偏差矩阵粗估计结果进行重构,得到重构的角度偏差矩阵;
6、3)对步骤2)得到的角度偏差矩阵计算得到信号矩阵的估计值;将信号矩阵的估计值以及步骤2)得到的重构的角度偏差矩阵进行交替迭代,得到还原的阵列接收信号矩阵;
7、4)基于步骤3)得到的还原的阵列接收信号矩阵,做矢量水听器阵列etam算法和波束形成,估计目标方位。
8、优选地,本发明所采用的步骤1)中阵元角度偏差矩阵是g,所述阵元角度偏差矩阵是g的表现形式是:
9、
10、所述对阵元角度偏差矩阵进行粗估计的结果是所述的表达式是:
11、
12、其中:
13、g是矢量水听器的角度偏差矩阵;
14、n是阵元总数;
15、x是矢量水听器阵列接收到的数据矩阵;
16、s是阵列流形矩阵;
17、是目标信号向量。
18、优选地,本发明所采用的步骤2)的具体实现方式是:
19、2.1)对阵元角度偏差矩阵进行粗估计的结果
20、进行归一化处理,得到归一化处理结果
21、2.2)将步骤2.1)得到的归一化处理结果分为h个2×2的子块,其中,第h个子块表示为其中,h≤h;所述的表达式是:
22、
23、其中:
24、α=3h-1;
25、和与阵元角度偏差的余弦值有关;
26、和与阵元角度偏差的正弦值有关;
27、是归一化结果的第α行α列;
28、是归一化结果的第α+1行以及α+1列;
29、是的归一化结果;
30、2.3)对阵元角度偏差矩阵中各元素进行对应的反余弦和反正弦变换后重新写入矩阵,记为其中i表示第i次迭代,所述的表达式为:
31、
32、2.4)以阵元角度偏差矩阵中第一个阵元为参考,先求解第n个矢量水听器的相对偏差矩阵,所述矢量水听器的相对偏差矩阵记为所述的表达式为:
33、
34、其中:re是复数的实部;
35、2.5)以步骤2.4)得到的矢量水听器的相对偏差矩阵为基础构建矢量水听器的角度偏差矩阵所述矢量水听器的角度偏差矩阵的表达式是:
36、
37、其中:
38、是第n个矢量水听器的角度偏差估计值;
39、所述的表达式是:
40、
41、其中:
42、以及分别是通过正弦函数与余弦函数得到的角度偏差βn的估计值;
43、所述的表达式是:
44、
45、所述的表达式是:
46、
47、2.6)以步骤2.5)所得到的矢量水听器的角度偏差矩阵为基础对阵元角度偏差矩阵进行重构,得到重构的角度偏差矩阵所述重构的角度偏差矩阵的表达式是:
48、
49、其中:
50、n≤n。
51、优选地,本发明所采用的步骤3)的具体实现方式是:
52、3.1)得到信号所述是信号矩阵是中第m个向量;
53、3.2)根据步骤2)所得到的重构的角度偏差矩阵对步骤3.1)得到的信号进行预估,得到信号的估计值
54、3.3)信号估计值和角度偏差矩阵交替迭代。
55、优选地,本发明所采用的步骤3.1)中信号的表达式是:
56、
57、其中:
58、x=[x(1),…,x(l)]t;x表示的是矢量水听器阵列接收到的数据矩阵;
59、t是转置;
60、
61、r是声压水听器阵列所接收数据的协方差矩阵;
62、为阵列流形矩阵;
63、h是共轭转置,是a的共轭转置;
64、pm代表的是信号功率矩阵p中的第m行;所述信号功率矩阵是p=[p1,p2,…,pm]t;
65、其中,m是1,2,3,……,m;
66、l表示测量时间内的快拍数;
67、
68、i为第i次迭代。
69、优选地,本发明所采用的步骤3.2)中信号的估计值的表达式是:
70、
71、其中:
72、是加权补偿因子;的表达式是:
73、
74、其中:
75、l表示测量时间内的快拍数;
76、n表示矢量水听器阵列的阵元数;
77、是pm第i次迭代的估计值;
78、是过程推导参数,所述的表达式是:
79、
80、其中:
81、x表示的是矢量水听器阵列接收到的数据矩阵;
82、tr表示矩阵的迹;
83、是过程推导参数,所述的表达式是:
84、
85、优选地,本发明所采用的步骤3.3)中扫描区域对应的信号功率是所述的表达式是:
86、
87、其中:
88、是信号的迭代,表达式是:
89、优选地,本发明所采用的步骤3.4)中迭代的收敛条件是:角度偏差矩阵与单位矩阵作差,若差矩阵的二范数小于0.001即退出迭代循环。
90、本发明的优点是:
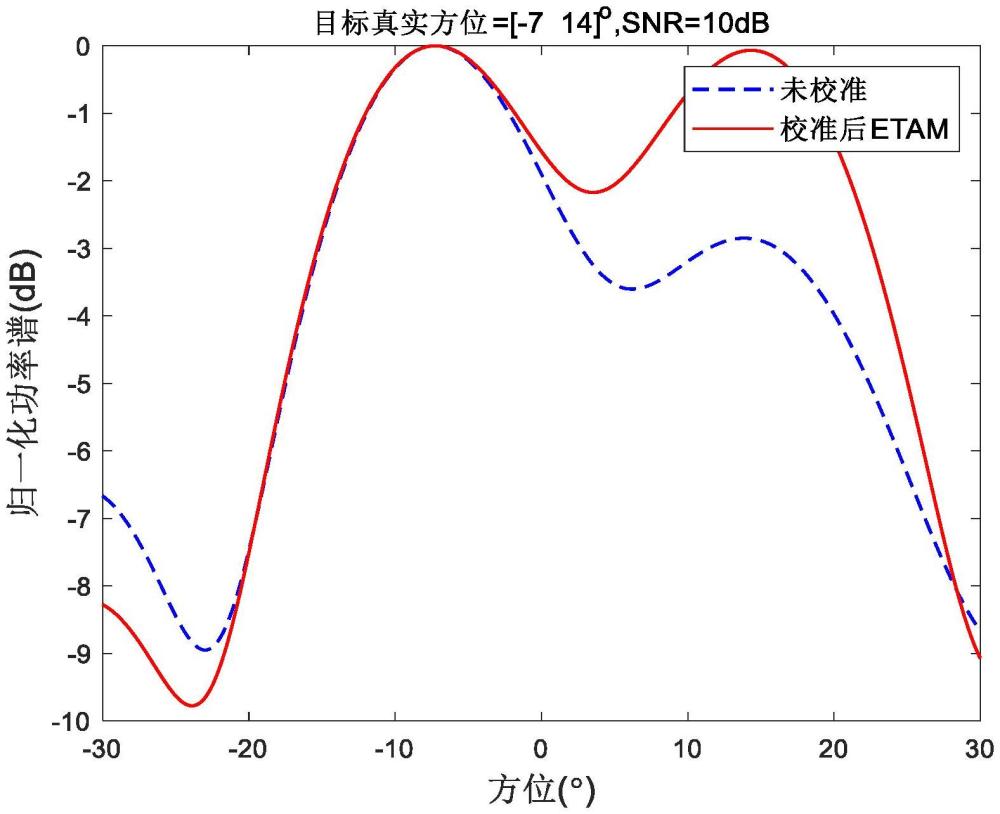
91、本发明利用所提etam算法,可以改善动平台矢量水听器阵列存在阵元角度偏差时的方位估计性能,提高方位估计精度,所述方法的重点在于利用矢量水听器固有的方向性,对粗估计结果进行重构,使得角度偏差矩阵的估计结果更加准确,本发明为存在阵元角度偏差的矢量水听器运动阵列doa估计方法,将动平台与矢量水听器合成孔径算法相结合,提高了矢量水听器阵列下etam算法的方位估计精度。该方法包括以下步骤:1)首先对阵元角度偏差矩阵做粗估计,然后利用矢量水听器固有的方向性,对粗估计结果进行重构,使角度偏差矩阵的估计结果更准确。2)固定角度偏差矩阵,恢复信号。经过角度偏差矩阵和信号矩阵交替迭代后,得到还原的阵列接收信号矩阵。3)再做矢量水听器阵列etam算法和波束形成,估计出目标方位。该发明主要是利用角度偏差矩阵和信号矩阵交替迭代,提出了存在阵元角度偏差的矢量水听器运动阵列doa估计方法。仿真结果证实了所提算法可以改善动平台矢量水听器阵列存在阵元角度偏差时的方位估计性能,提高方位估计精度。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292464.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表