一种箱形构件及其焊接装置、焊接工艺的制作方法
- 国知局
- 2024-09-11 15:06:06
本发明涉及焊接,具体涉及一种箱形构件及其焊接装置、焊接工艺。
背景技术:
1、本部分提供的仅仅是与本公开相关的背景信息,其并不必然构成现有技术。
2、箱形构件是钢结构领域最常用的构件之一,传统的箱形构件主要采用板拼工艺,由四条焊缝焊接组成。焊接工作量大、效率低,且多采用埋弧焊进行焊接,焊接热输入高,焊后变形大,需耗费大量人工进行变形矫正,工艺不经济,技术不环保。
技术实现思路
1、因此,本发明要解决的技术问题在于克服目前箱形构件焊接工作量大的缺陷,从而提供一种箱形构件及其焊接装置、焊接工艺。
2、为实现上述目的,本发明采取的技术方案为:
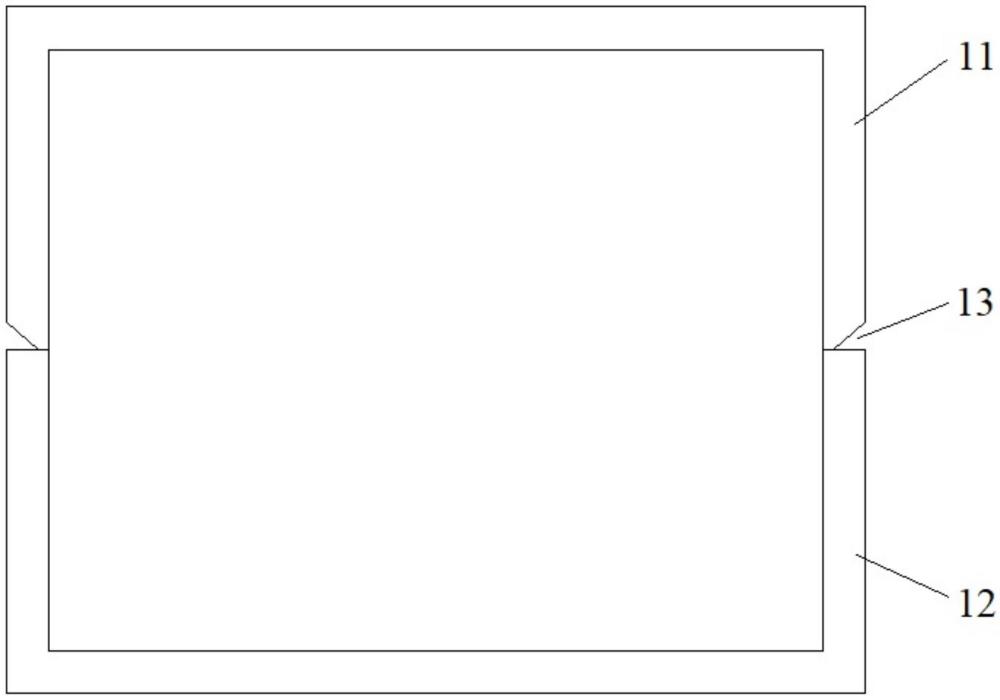
3、一种箱形构件,包括由下至上分体设置的下部槽钢和上部槽钢,所述下部槽钢与上部槽钢围设成箱形形状;所述下部槽钢具有底板、第一边板和第二边板,所述第一边板和第二边板的顶端面为平面状且位于同一高度;所述下部槽钢具有顶板、第三边板和第四边板,所述第三边板位于第一边板的正上方,所述第四边板位于第二边板的正上方,所述第三边板和第四边板的底端分别对称开设有由外向内倾斜的坡口,所述第三边板的底端平面与第一边板之间、第四边板的底端平面与第二边板之间形成坡口根部间隙。
4、进一步优化技术方案,所述下部槽钢和上部槽钢之间设置有至少三道工艺隔板,以使下部槽钢与上部槽钢之间的坡口根部间隙保持一致。
5、进一步优化技术方案,所述工艺隔板的两个竖向边板上对称上开设有若干对镂空豁口,其中一对镂空豁口的开设位置依次与两个坡口的位置相对应。
6、进一步优化技术方案,所述坡口的角度为35°~40°,所述坡口的根部间隙为0.5mm~1.5mm,所述坡口的钝边为4mm~6mm。
7、一种箱形构件的焊接装置,包括:
8、两套地轨,分别位于箱形构件的左右两侧;
9、两套焊接机器人,分别滑动设在地轨的正上方并对箱形构件进行对称焊接;
10、作业平台,所述箱形构件通过作业平台进行支撑。
11、进一步优化技术方案,所述焊接机器人为激光-电弧复合焊接机器人;
12、和/或所述作业平台为辊道系统。
13、进一步优化技术方案,所述焊接机器人的末端设置有用于保证焊接过程位置准确性的激光视觉焊缝跟踪系统。
14、一种箱形构件的焊接工艺,包括以下步骤:
15、s1.将装备工艺隔板的下部槽钢至于作业平台上;
16、s2.装配上部槽钢,两侧工艺隔板与上部槽钢焊接固定;
17、s3.将两套焊接机器人移动到工件焊接起点,利用两套焊接机器人对上部槽钢和下部槽钢进行对称焊接。
18、进一步优化技术方案,在步骤s3中,利用两套激光-电弧复合焊接机器人并采用激光电弧复合横焊工艺对上部槽钢和下部槽钢进行对称焊接:
19、调整气保焊焊枪轴线和激光光轴至同一平面,采用激光引导方式,气保焊焊枪与工件平面夹角60°~65°,激光光轴与工件平面夹角85°~90°,启动焊接机器人完成工件打底焊接,利用激光视觉焊缝跟踪系统确保焊接过程位置准确;
20、启动机器人完成工件填充焊接,至坡口填满。
21、进一步优化技术方案,所述打底焊接采用大功率激光,以实现深穿透及单面焊双面成型;所述打底焊接的打底参数为:激光功率6.5~7.5w,电弧电流160~180a,离焦量-1~-2mm,光丝间距1~2mm,焊接速度800~1200mm·min-1;
22、所述填充焊接采用小激光功率,以引导电弧实现稳定填充;所述填充焊接的填充参数为:激光功率2.5~3.5w,电弧电流200~250a,离焦量-1~-2mm,光丝间距1~2mm,焊接速度1000~1500mm·min-1。
23、本发明技术方案,具有如下优点:
24、1.本发明提供的一种箱形构件,由两组分体的热轧槽钢拼焊而成,在上部槽钢两侧开设坡口,加工流程简单、制作周期短。
25、下部槽钢与上部槽钢相接触的位置设置为坡口状,进而使焊缝数量由原来的四条减少为两条,焊接工作量降低了50%以上,焊接效率得到了提高。
26、上部槽钢设置的两个坡口对称布置,进而使焊接装置能够对箱形构件进行对称焊接,使焊后箱形构件无需变形矫正,减少了火焰矫正工序,经济环保,加快了箱形构件的生产效率。
27、2.本发明提供的一种箱形构件,采用加装工艺隔板的方式,一方面控制间隙的一致性,另一方面控制焊接变形。
28、3.本发明提供的一种箱形构件的焊接装置,采用激光-电弧复合焊接,焊接热输入仅为埋弧焊的1/4左右,通过两套焊接机器人同步沿地轨移动的方式,实现对箱形构件的两侧对称焊接,使焊后箱形构件无需火焰矫正,焊接效率高且绿色低碳。
29、4.本发明提供的一种箱形构件的焊接装置,作业平台为辊道系统,设置的辊道系统能够对箱形构件进行传输。当箱形构件传输至焊接机器人的位置时,辊道系统停止传输,此时的焊接机器人可对箱形构件进行移动焊接,焊接过程更加智能化。箱形构件焊接完成后,自动从辊道系统流入下道工序。
30、5.本发明提供的一种箱形构件激光-mag复合焊接工艺,焊接热输入降低了78.6%,同时对箱形构件两侧对称焊接,并采用工艺隔板防变形措施,焊后箱形构件无需变形矫正,和传统工艺相比加工效率大大提高。并且低碳高效,同时便于采用机器人智能焊接,提高自动化水平。
技术特征:1.一种箱形构件,其特征在于,包括由下至上分体设置的下部槽钢(12)和上部槽钢(11),所述下部槽钢(12)与上部槽钢(11)围设成箱形形状;所述下部槽钢(12)具有底板、第一边板和第二边板,所述第一边板和第二边板的顶端面为平面状且位于同一高度;所述下部槽钢(12)具有顶板、第三边板和第四边板,所述第三边板位于第一边板的正上方,所述第四边板位于第二边板的正上方,所述第三边板和第四边板的底端分别对称开设有由外向内倾斜的坡口(13),所述第三边板的底端平面与第一边板之间、第四边板的底端平面与第二边板之间形成坡口根部间隙。
2.根据权利要求1所述的箱形构件,其特征在于,所述下部槽钢(12)和上部槽钢(11)之间设置有至少三道工艺隔板(2),以使下部槽钢(12)与上部槽钢(11)之间的坡口根部间隙保持一致。
3.根据权利要求2所述的箱形构件,其特征在于,所述工艺隔板(2)的两个竖向边板上对称上开设有若干对镂空豁口(21),其中一对镂空豁口(21)的开设位置依次与两个坡口(13)的位置相对应。
4.根据权利要求1-3中任一项所述的箱形构件,其特征在于,所述坡口(13)的角度为35°~40°,所述坡口(13)的根部间隙为0.5mm~1.5mm,所述坡口(13)的钝边为4mm~6mm。
5.一种箱形构件的焊接装置,其特征在于,所述装置是对权利要求1-4中任一项所述的箱形构件进行焊接,包括:
6.根据权利要求5所述的箱形构件的焊接装置,其特征在于,所述焊接机器人为激光-电弧复合焊接机器人;
7.根据权利要求5所述的箱形构件的焊接装置,其特征在于,所述焊接机器人的末端设置有用于保证焊接过程位置准确性的激光视觉焊缝跟踪系统。
8.一种箱形构件的焊接工艺,其特征在于,所述工艺为权利要求1-4中任一项所述的箱形构件的焊接工艺,包括以下步骤:
9.根据权利要求8所述的箱形构件的焊接工艺,其特征在于,在步骤s3中,利用两套激光-电弧复合焊接机器人并采用激光电弧复合横焊工艺对上部槽钢(11)和下部槽钢(12)进行对称焊接:
10.根据权利要求9所述的箱形构件的焊接工艺,其特征在于,所述打底焊接采用大功率激光,以实现深穿透及单面焊双面成型;所述打底焊接的打底参数为:激光功率6.5~7.5w,电弧电流160~180a,离焦量-1~-2mm,光丝间距1~2mm,焊接速度800~1200mm·min-1;
技术总结本发明公开了一种箱形构件及其焊接装置、焊接工艺,所述箱形构件的焊接工艺包括以下步骤:将装备工艺隔板的下部槽钢至于作业平台上;装配上部槽钢,两侧工艺隔板与上部槽钢焊接固定;将两套焊接机器人移动到工件焊接起点,利用两套激光‑电弧复合焊接机器人并采用激光电弧复合横焊工艺对上部槽钢和下部槽钢进行对称焊接。本发明下部槽钢与上部槽钢相接触的位置设置为坡口状,进而使焊缝数量由原来的四条减少为两条,焊接工作量降低了50%以上,焊接效率得到了提高。本发明采用激光电弧复合横焊工艺,焊接热输入大大降低,同时对箱形构件两侧对称焊接,并采用工艺隔板防变形措施,焊后箱形构件无需变形矫正,和传统工艺相比加工效率大大提高。技术研发人员:陈振明,杨高阳受保护的技术使用者:中建钢构股份有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/293194.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表