一种具有全地形通过能力的特种机器人的制作方法
- 国知局
- 2024-09-14 14:30:33
本发明涉及一种特种机器人,更具体的说是一种具有全地形通过能力的特种机器人。
背景技术:
1、随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,其救灾消防人员配合特种机器人,就能够在灭火和抢险救援中发挥举足轻重的作用。
2、应急救援任务中,诸如山地、丘陵、滩涂等地段,传统应急机器人的通过性差,尤其是火灾、地震等复杂危险作业环境中,传统的救援机器人无法做到将灾区中的民众给运送出来。
3、并且大多数遥操作机器人工作都对机器人的灵活性和精度都有很高的要求。机器人应用绝缘杆进行操作时,同样需要实时地调整工具端对绝缘杆施加的力,才能保证有效的配合。而直接式力反馈是通过作用于操作者手上的反馈动作,当用户从手上感知到危险或者误操作时,将会存在较大的反馈时延。
技术实现思路
1、本发明主要解决的技术问题是提供一种具有全地形通过能力的特种机器人,解决上述背景技术中提出的问题。
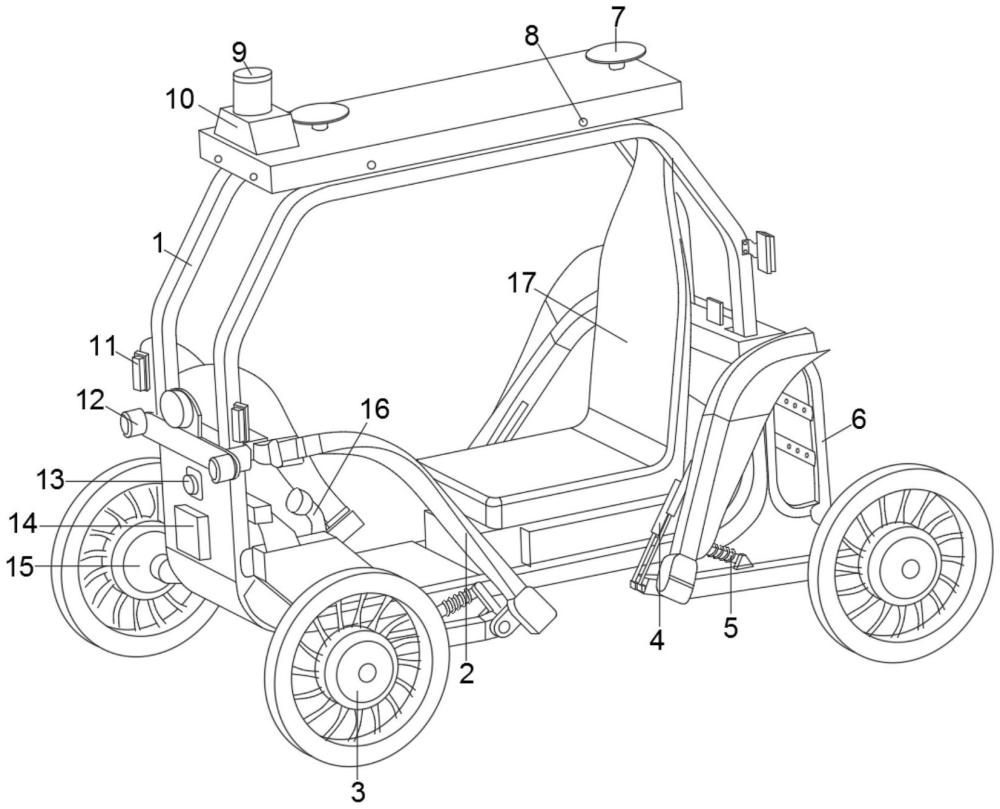
2、为解决上述技术问题,根据本发明的一个方面,更具体的说是一种具有全地形通过能力的特种机器人,包括车架,所述车架的前后两侧均设有两个悬架,所述车架的中间区域固定安装有座椅,所述车架的后端固定安装有货架,所述悬架的端部连接有轮毂电机,其轮毂电机的内侧设有刹车盘,所述悬架的关节处设有油气弹簧和避震器,所述车架的顶端设有遮光板,其遮光板的表面设置天线、摄像头、固态雷达和多线激光,所述多线激光位于固态雷达的上方,所述车架的前后两侧均设有两个转向灯,所述车架的前侧且位于转向灯的下方设有两个照明灯、充电口和毫米波雷达。
3、更进一步的,所述车架的内部且位于座椅的前方设有操作器,所述悬架由大臂和小臂构成,所述轮毂电机连接在小臂端部,其悬架的大臂部分呈叶片状并组成车架挡泥板结构。
4、一种具有全地形通过能力的特种机器人,包括车架、电池、前悬架、后悬架和负载模块,所述负载模块包括无人驾驶控制模块、仪表盘、雷达、摄像头、刹车转向灯、转向舵机,驱动器a、驱动器b、驱动器c、驱动器d、照明开关和照明灯,所述后悬架设有右后轮、右后下泵、左后轮和左后下泵,所述前悬架设有右前下泵、右前轮、左前轮和左前下泵。
5、更进一步的,所述无人驾驶控制模块与转向舵机信号连接,其转向舵机通过该无人驾驶控制模块来调用驱动器a、驱动器b、驱动器c、驱动器d进行驱动,并通过四个驱动器产生差速实现对该机器人的转向控制。
6、更进一步的,所述电池的输入端连接有外部充电口,所述电池的一输出端通过照明开关与照明灯连接,所述总开关直接与电池连接,所述油门和倒车切换均连接至电池与四个驱动器连接的中间线路处。
7、更进一步的,所述无人驾驶控制模块的一输出端连接有刹车推杆,所述刹车推动的输出端连接有上泵,其上泵的输出端与右前下泵、左前下泵、右后下泵和左后下泵通过油管连通。
8、更进一步的,所述雷达、摄像头、刹车转向灯的输出端与无人驾驶控制模块的输入端信号连接。
9、更进一步的,所述驱动器a的动力轴与右前轮连接,所述驱动器b的动力轴与左前轮连接,所述驱动器c的动力轴与右后轮连接,所述驱动器d的动力轴与左后轮连接。
10、本发明一种具有全地形通过能力的特种机器人的有益效果为:
11、1、本发明在应急救援任务中,诸如山地、丘陵、滩涂等地段,可以解决传统车辆的通过性差的问题,尤其是火灾、地震等复杂危险作业环境中,使用该全地形车便于将人从复杂危险环境中解放出来;并且该车并根据任务需求设计自主导航和遥控两种操作模式,结合智能救援机器人的轮式结构的特性以及良好的越障性能。
12、2、通过设置的天线、毫米波雷达、固态雷达和多线激光等模块的配合可以实现其自主导航功能,并且结合全地形机器人的轮式结构的特性、独特的悬架结构以及良好的越障性能,拟改进传统的slam自主导航一味避让障碍物的导航方式,从而让应急救援机器人更加智能化。
技术特征:1.一种具有全地形通过能力的特种机器人,包括车架(1),其特征在于:所述车架(1)的前后两侧均设有两个悬架(2),所述车架(1)的中间区域固定安装有座椅(17),所述车架(1)的后端固定安装有货架(6),所述悬架(2)的端部连接有轮毂电机(3),其轮毂电机(3)的内侧设有刹车盘(15),所述悬架(2)的关节处设有油气弹簧(4)和避震器(5),所述车架(1)的顶端设有遮光板,其遮光板的表面设置天线(7)、摄像头(8)、固态雷达(10)和多线激光(9),所述多线激光(9)位于固态雷达(10)的上方,所述车架(1)的前后两侧均设有两个转向灯(11),所述车架(1)的前侧且位于转向灯(11)的下方设有两个照明灯(12)、充电口(13)和毫米波雷达(14)。
2.根据权利要求1所述的一种具有全地形通过能力的特种机器人,其特征在于:所述车架(1)的内部且位于座椅(17)的前方设有操作器(16),所述悬架(2)由大臂和小臂构成,所述轮毂电机(3)连接在小臂端部,其悬架(2)的大臂部分呈叶片状并组成车架(1)挡泥板结构。
3.一种具有全地形通过能力的特种机器人,其特征在于,包括车架、电池、前悬架、后悬架和负载模块,所述负载模块包括无人驾驶控制模块、仪表盘、雷达、摄像头、刹车转向灯、转向舵机,驱动器a、驱动器b、驱动器c、驱动器d、照明开关和照明灯,所述后悬架设有右后轮、右后下泵、左后轮和左后下泵,所述前悬架设有右前下泵、右前轮、左前轮和左前下泵。
4.根据权利要求3所述的一种具有全地形通过能力的特种机器人,其特征在于:所述无人驾驶控制模块与转向舵机信号连接,其转向舵机通过该无人驾驶控制模块来调用驱动器a、驱动器b、驱动器c、驱动器d进行驱动,并通过四个驱动器产生差速实现对该机器人的转向控制。
5.根据权利要求3所述的一种具有全地形通过能力的特种机器人,其特征在于:所述电池的输入端连接有外部充电口,所述电池的一输出端通过照明开关与照明灯连接,所述总开关直接与电池连接,所述油门和倒车切换均连接至电池与四个驱动器连接的中间线路处。
6.根据权利要求3所述的一种具有全地形通过能力的特种机器人,其特征在于:所述无人驾驶控制模块的一输出端连接有刹车推杆,所述刹车推动的输出端连接有上泵,其上泵的输出端与右前下泵、左前下泵、右后下泵和左后下泵通过油管连通。
7.根据权利要求3所述的一种具有全地形通过能力的特种机器人,其特征在于:所述雷达、摄像头、刹车转向灯的输出端与无人驾驶控制模块的输入端信号连接。
8.根据权利要求3所述的一种具有全地形通过能力的特种机器人,其特征在于:所述驱动器a的动力轴与右前轮连接,所述驱动器b的动力轴与左前轮连接,所述驱动器c的动力轴与右后轮连接,所述驱动器d的动力轴与左后轮连接。
技术总结一种具有全地形通过能力的特种机器人,包括车架,所述车架的前后两侧均设有两个悬架,所述车架的中间区域固定安装有座椅,所述车架的后端固定安装有货架,所述悬架的端部连接有轮毂电机,其轮毂电机的内侧设有刹车盘,所述悬架的关节处设有油气弹簧和避震器,所述车架的顶端设有遮光板,其遮光板的表面设置天线、摄像头、固态雷达和多线激光,所述多线激光位于固态雷达的上方。通过设置的天线、毫米波雷达、固态雷达和多线激光等模块的配合可以实现其自主导航功能,并且结合全地形机器人的轮式结构的特性、独特的悬架结构以及良好的越障性能,拟改进传统的SLAM自主导航一味避让障碍物的导航方式,从而让应急救援机器人更加智能化。技术研发人员:谢小辉,李晓受保护的技术使用者:航天科工深圳(集团)有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294455.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表