装载机动臂焊接加工方法、装夹工装、装载机动臂及装载机与流程
- 国知局
- 2024-09-14 14:33:37
本发明涉及装载机动臂焊接加工方法、装夹工装、装载机动臂及装载机,属于装载机设备。
背景技术:
1、装载机动臂由左、右动臂侧板总成和摇臂座梁总成三个部件焊接组成。动臂在拼装时,左、右动臂侧板总成与摇臂座梁总成的拼装间隙不均匀,并且多处拼装位置间隙>2mm;动臂在焊接后,左、右动臂侧板总成部件铲斗端左铰接孔与右铰接孔的高度差超过10mm。此类生产问题造成产品返工频繁,严重影响产品的生产效率和质量。
技术实现思路
1、本发明要解决的技术问题是:提供一种装载机动臂焊接加工方法、装夹工装、装载机动臂及装载机。
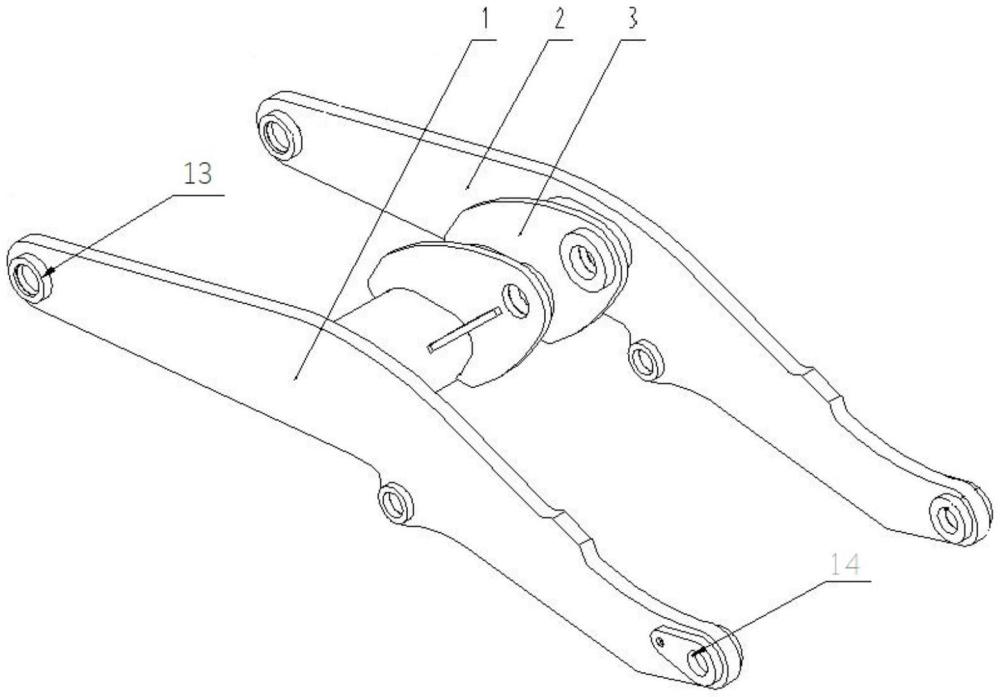
2、为解决上述技术问题,本发明的技术方案是提供了一种装载机动臂,包括摇臂座梁总成,摇臂座梁总成包括具有两相对设置的开口的连接管,连接管的两侧开口分别固定连接有第一动臂侧板总成和第二动臂侧板总成;
3、第一动臂侧板总成和第二动臂侧板总成均具有车架端铰接孔和铲斗端铰接孔;第一动臂总成和第二动臂总成与摇臂座梁总成部件的拼装间隙≤1mm。
4、根据本发明,进一步地,所述第一动臂侧板总成和第二动臂侧板总成的铲斗端铰接孔高度差≤3mm。
5、本发明还提供了一种装夹工装,用于定位装夹上述装载机动臂。
6、根据本发明,进一步地,包括夹具体,夹具体从左至右依次安装有铲斗端定位工位、第一夹紧工位、第二夹紧工位、摇臂座梁定位工位、第三夹紧工位和车架端定位工位;铲斗端定位工位包括对称设置的铲斗端定位座,铲斗端定位座高度上下可调,用于调节与其连接的第一动臂侧板总成和第二动臂侧板总成的铲斗端铰接孔的高度。
7、根据本发明,进一步地,所述摇臂座梁定位工位上设置有对连接管固定定位的摇臂座梁定位座;第一夹紧工位包括对称设置的两个夹紧座一;第二夹紧工位包括对称设置的两个夹紧座二;第三夹紧工位包括对称设置的两个夹紧座三;两个夹紧座一和两个夹紧座三之间还分别设置有侧板翻转定位座一和侧板翻转定位座二,用于夹紧定位对应的第一动臂侧板总成和第二动臂侧板总成。
8、本发明还提供了一种装载机动臂焊接加工方法,用于安装定位所述装载机动臂,包括以下步骤:
9、步骤一:拼装前准备;使用双面铣机床将摇臂座梁总成两侧面开口按尺寸要求铣平;
10、步骤二:安装定位;先将摇臂座梁总成固定在权利要求3至5任意所述摇臂座梁定位座上定位放置,然后将第二动臂侧板总成在铲斗端定位座和车架端定位座上定位放置,同时第二动臂侧板总成下方的铲斗端定位座定位尺寸下降3mm,再将第一动臂侧板总成在铲斗端定位座和车架端定位座上定位放置,同时第一动臂侧板总成下方的铲斗端定位座定位尺寸抬高2mm;
11、步骤三:安装精度调整;第一动臂侧板总成和第二动臂侧板总成的侧面放置在侧板翻转定位座一和侧板翻转定位座二上;夹紧座一、夹紧座二和夹紧座三压紧第一动臂侧板总成和第二动臂侧板总成;使第一动臂侧板总成、第二动臂侧板总成与摇臂座梁总成的拼装间隙≤1mm;
12、步骤四:焊接定位;对第一动臂侧板总成、第二动臂侧板总成与摇臂座梁总成的连接位置进行定位焊接,按照先焊接左、右侧边焊缝,再焊接上、下侧焊缝的顺序进行焊接;
13、步骤五:将经过步骤四的工件吊到动臂机器人焊接工装上定位放置,压紧第二动臂侧板总成;
14、步骤六:焊缝;焊接第一动臂侧板总成、第二动臂侧板总成与摇臂座梁总成的装配位置焊缝;
15、步骤七:将经过步骤六的工件吊下来后水平放置,至完全冷却。
16、本发明还提供了一种装载机,包括车体和铲斗,采用上述装载机动臂;车架端铰接孔与车体铰接,铲斗端铰接孔与铲斗铰接。
17、本发明还提供了另一种装载机,采用的装载机动臂采用上述的方法焊接加工。
18、经实践证明,此种方法与现有技术比较,有益的效果是:
19、第一动臂侧板总成、第二动臂侧板总成与摇臂座梁总成间的拼装间隙≤1mm,第一动臂侧板总成、第二动臂侧板总成的铲斗装配端的铰接孔高度差≤3mm。使用此方法加工的装载机动臂一次合格,提高装配质量、装配效率高、成本低,具有很强的实用价值。
技术特征:1.一种装载机动臂,其特征在于:包括摇臂座梁总成,摇臂座梁总成包括具有两相对设置的开口的连接管,连接管两端开口分别固定连接有第一动臂侧板总成和第二动臂侧板总成;
2.如权利要求1所述的一种装载机动臂,其特征在于:所述第一动臂侧板总成和第二动臂侧板总成的铲斗端铰接孔高度差≤3mm。
3.一种装夹工装,其特征在于:用于定位装夹权利要求1或2所述的装载机动臂。
4.如权利要求3所述的一种装夹工装,其特征在于:包括夹具体,夹具体从左至右依次安装有铲斗端定位工位、第一夹紧工位、第二夹紧工位、摇臂座梁定位工位、第三夹紧工位和车架端定位工位;铲斗端定位工位包括对称设置的铲斗端定位座,铲斗端定位座高度上下可调,用于调节与其连接的第一动臂侧板总成和第二动臂侧板总成的铲斗端铰接孔的高度。
5.如权利要求4所述的一种装夹工装,其特征在于:所述摇臂座梁定位工位上设置有对连接管固定定位的摇臂座梁定位座;所述第一夹紧工位包括对称设置的两个夹紧座一;第二夹紧工位包括对称设置的两个夹紧座二;第三夹紧工位包括对称设置的两个夹紧座三;两个夹紧座一和两个夹紧座三之间还分别设置有侧板翻转定位座一和侧板翻转定位座二,用于夹紧定位对应的第一动臂侧板总成和第二动臂侧板总成。
6.一种装载机动臂焊接加工方法,其特征在于,用于安装定位如权利要求1或2所述的装载机动臂,包括以下步骤:
7.一种装载机,包括车体和铲斗,其特征在于:采用如权利要求1至2所述的装载机动臂;车架端铰接孔与车体铰接,铲斗端铰接孔与铲斗铰接。
8.一种装载机,其特征在于:采用的装载机动臂采用如权利要求6所述的方法焊接加工。
技术总结本发明属于装载机领域,公开了一种装载机动臂焊接加工方法、装夹工装、装载机动臂及装载机。经过安装定位、安装精度调整、焊接定位、焊缝和冷却,实现装载机动臂的焊接加工。此种方法与现有焊接加工方法相比,焊接无返工,确保一次焊接质量合格,保证了焊接质量、大大提高动臂部件焊接效率和产品质量。本发明还提供了装夹工装、装载机动臂及装载机。技术研发人员:张家标,葛建厂,王蕊玲,畅冰受保护的技术使用者:龙工(上海)机械制造有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294768.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。