一种基于声阵列的三维运动声源跟踪定位方法及运动轨迹生成方法
- 国知局
- 2024-09-14 14:59:05
本发明属于阵列信号处理及自动化控制领域,更具体地,涉及一种基于声阵列的三维运动声源跟踪定位方法及运动轨迹生成方法。
背景技术:
1、声源的跟踪定位是一种关键技术,用于确定声源的位置,进一步可对运动声源跟踪并确定轨迹,在许多领域中具有广泛的应用和前景。准确地定位声源可以提高语音通信质量和语音识别的准确性,同时可以更精准地聚焦目标位置。此外,定位声源技术还在声音增强和降噪处理、音频定位导航、声纹识别等领域中有着广泛的应用。而对运动声源的跟踪定位则可以实时确定声源位置,并协助监测、分析等工作,可应用于船舶与车辆检测、机器设备异常监测、生物学分析等领域。因此,对于声源的跟踪定位具有重要的学术和应用价值。
2、目前,对于声源定位常局限于采用二维静态声源定位,例如:中国发明专利说明书cn111650559a(申请公布号)中提出一种实时处理二维声源定位算法,结合vad算法和改进srp-phat算法的策略,并且采取azimuth角和elevation角分步定位的方法来解决二维声源定位的精度、稳定性和计算量的问题。中国发明专利说明书cn117686976a(申请公布号),提供了一种用于二维声源定位的无量化误差的位置编解码方法,能够消除量化误差,大幅提升了声源定位的精度,即使在噪声和混响等恶劣条件下也有很好的定位效果。然而,二维定位具有一定的局限性:二维定位只能提供声源在某个平面上的位置信息,而无法提供声源在距离维度的准确信息,限制了定位的精确性;同时,无法实现对运动声源的三维动态跟踪和轨迹描绘。
3、另外,声源跟踪定位的精度受到环境噪声等不确定因素的影响,可能会降低定位的准确性。为了提高精度,常常采用卡尔曼滤波作为一种有效的方法来进行目标跟踪和状态估计,例如:中国发明专利说明书cn110045333a(申请公布号)提出一种基于卡尔曼滤波的声源定位方法,利用卡尔曼滤波对虚拟轨迹进行估计。中国发明专利说明书cn115453458a(申请公布号)提出一种基于卡尔曼滤波的高精度声源定位方法,更精确地实现中高频目标在非等声速条件下的高精度连续定位跟踪问题。然而,卡尔曼滤波假设了线性系统和高斯噪声的条件,而现实世界中的声源定位问题往往具有非线性和非高斯噪声的特性,因而,传统的卡尔曼滤波方法的效果会明显下降。为克服这些限制,对卡尔曼滤波进行改进以提高精度是必要的。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种基于声阵列的三维运动声源跟踪定位方法及运动轨迹生成方法,其目的在于解决现有声定位方法只能局限于二维平面的静态声源定位的问题。
2、为实现上述目的,按照本发明的一个方面,提供了一种基于声阵列的三维运动声源跟踪定位方法,包括:
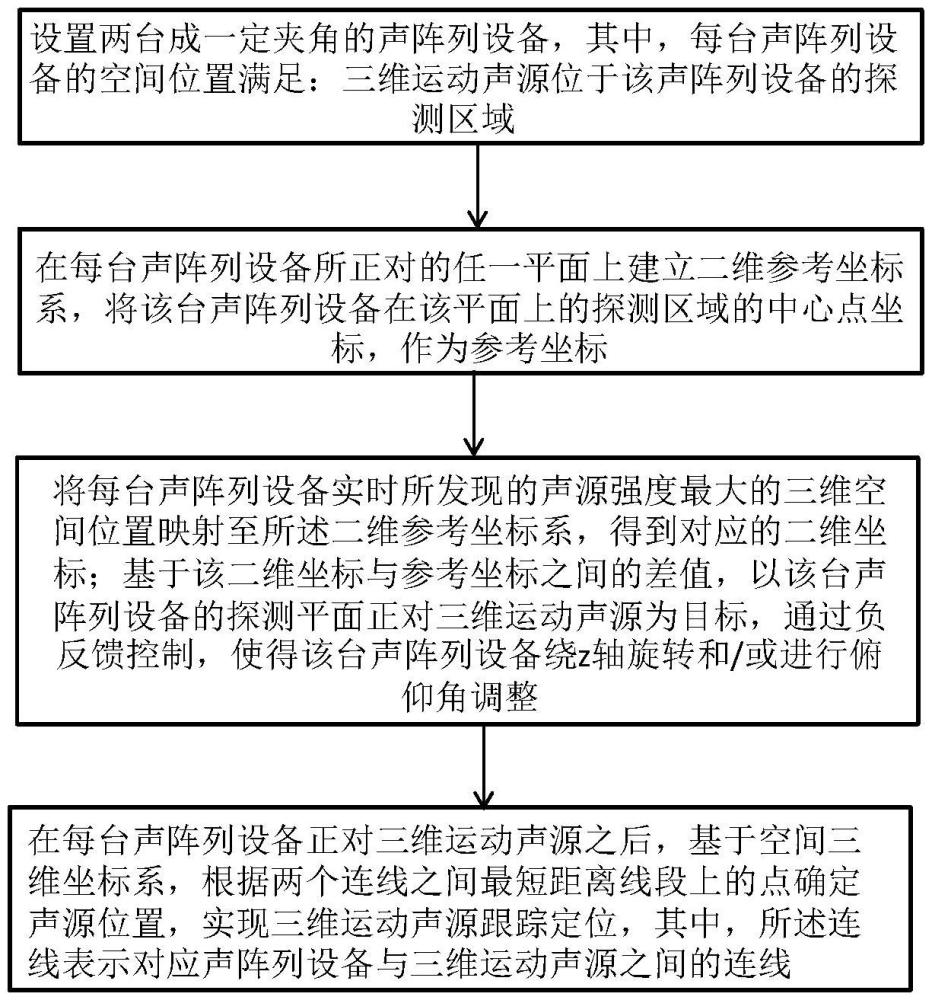
3、设置两台成一定夹角的声阵列设备,其中,每台声阵列设备的空间位置满足:三维运动声源位于该声阵列设备的探测区域;
4、在每台声阵列设备所正对的任一平面上建立二维参考坐标系,将该台声阵列设备在该平面上的探测区域的中心点坐标,作为参考坐标;
5、将每台声阵列设备实时所发现的声源强度最大的三维空间位置映射至所述二维参考坐标系,得到对应的二维坐标;基于该二维坐标与所述参考坐标之间的差值,以该台声阵列设备的探测平面正对三维运动声源为目标,通过负反馈控制,使得该台声阵列设备绕z轴旋转和/或进行俯仰角调整;
6、在每台声阵列设备正对三维运动声源之后,基于空间三维坐标系,根据两个连线之间最短距离线段上的点确定声源位置,实现三维运动声源跟踪定位,其中,所述连线表示对应声阵列设备与三维运动声源之间的连线。
7、进一步,每台声阵列设置的探测平面安装有多个成多臂螺旋式排布的麦克风咪头。
8、进一步,将两个连线之间最短距离线段的中点作为所述声源位置。
9、进一步,基于三维运动声源的方位,建立空间三维坐标系,使得三维运动声源位于三维坐标系的一个象限内;
10、所述设置两台成一定夹角的声阵列设备具体为:将其中一台声阵列设备设置在三维坐标系的x轴上,另一台声阵列设备设置在三维坐标系的y轴上;
11、则确定其中一台声阵列设备在所述空间三维坐标系中的坐标a(a,0,0),并计算该台声阵列设备的探测平面的法向量与所述空间三维坐标系的x、y、z轴的夹角α1、β1、γ1;确定另一台声阵列设备在所述空间三维坐标系中的坐标b(0,b,0),并计算该台声阵列设备的探测平面的法向量与所述空间三维坐标系的x、y、z轴的夹角α2、β2、γ2;
12、两台声阵列设备与三维运动声源正对下的连线方程为:
13、
14、
15、本发明还提供一种基于声阵列的三维运动声源跟踪定位装置,包括:
16、两台声阵列设备,每台声阵列设备的空间位置满足:三维运动声源位于该声阵列设备的探测区域;
17、控制装置,用于在每台声阵列设备所正对的任一平面上建立二维参考坐标系,将该台声阵列设备在该平面上的探测区域的中心点坐标,作为参考坐标;将每台声阵列设备实时所发现的声源强度最大的三维空间位置映射至所述二维参考坐标系,得到对应的二维坐标;基于该二维坐标与所述参考坐标之间的差值,以该台声阵列设备的探测平面正对三维运动声源为目标,通过负反馈控制,使得该台声阵列设备绕z轴旋转和/或进行俯仰角调整;在每台声阵列设备正对三维运动声源之后,基于空间三维坐标系,根据两个连线之间最短距离线段上的点确定声源位置,其中,所述连线表示对应声阵列设备与三维运动声源之间的连线。
18、本发明还提供一种三维运动声源的运动轨迹生成方法,包括:
19、基于由如上所述的一种基于声阵列的三维运动声源跟踪定位方法所采集得到的声源位置集合,生成三维运动声源的运动轨迹。
20、进一步,采用拓展卡尔曼滤波方法对所述声源位置集合的坐标数据进行滤波,基于滤波后的声源位置集合,通过函数拟合回归,生成三维运动声源的运动轨迹。
21、进一步,在采用所述拓展卡尔曼滤波方法进行滤波时,所使用的测量噪声协方差矩阵为经过最大相关熵准则修正过后的测量噪声协方差矩阵,表示为:
22、
23、式中,表示经过最大相关熵准则修正过后的测量噪声协方差矩阵;r表示预设的原始测量噪声协方差矩阵;t表示转置运算;表示声源位置中第i个维度所对应的高斯核函数取值,hk表示测量方程h泰勒展开后一阶项的系数,表示通过k-1时刻的后验状态估计所得出的k时刻的先验状态估计,zk表示由声阵列设备所测量得到的声源位置。
24、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述存储介质所在设备执行如上所述的一种三维运动声源的运动轨迹生成方法。
25、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
26、(1)本发明提出一种基于声阵列的三维运动声源跟踪定位方法,设置两台成一定夹角的声阵列设备,其中,每台声阵列设备的空间位置满足:三维运动声源位于该声阵列设备的探测区域;在每台声阵列设备所正对的任一平面上建立二维参考坐标系,将该台声阵列设备在该平面上的探测区域的中心点坐标,作为参考坐标;将每台声阵列设备实时所发现的声源强度最大的三维空间位置映射至二维参考坐标系,得到对应的二维坐标;基于该二维坐标与参考坐标之间的差值,以该台声阵列设备的探测平面正对三维运动声源为目标,通过负反馈控制,使得该台声阵列设备绕z轴旋转和/或进行俯仰角调整;在每台声阵列设备正对三维运动声源之后,基于空间三维坐标系,根据两个连线之间最短距离线段上的点确定声源位置,实现三维运动声源跟踪定位。本发明采用两个声阵列设备,基于负反馈控制,调整每个设备正对声源,最后根据两个设备分别与声源的连线距离,确定声源位置,跟踪稳定性好,可靠性高。
27、(2)本发明还提出了一种运动轨迹生成方法,其中引入了一种改进的卡尔曼滤波算法,以应对非高斯噪声和非线性轨迹的影响,提高声源跟踪定位的准确性。改进的算法通过对非线性系统的处理和引入最大相关熵准则,有效抑制非线性系统和非高斯噪声对声源定位坐标的影响。该算法能够更好地适应复杂环境中的不确定性因素,从而提高声源跟踪定位的精度。
本文地址:https://www.jishuxx.com/zhuanli/20240914/296578.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表