一种工业管道泄漏检测球形机器人行走机构的制作方法
- 国知局
- 2024-09-19 14:59:22
本技术涉及管道检测机器人,特别涉及一种工业管道泄漏检测球形机器人行走机构。
背景技术:
1、随着我国油气管道工程的发展,我国的石油运输能力和管道保护技术得到了极大的提升,但原油管道渗漏现象依然时有发生。原油管道泄漏后会严重破坏当地土壤,污染地下水,一旦发生爆炸事故,不仅会造成重大经济损失还会造成严重的人员伤亡。因此,当其发生泄漏时,使用高效的检测措施至关重要。
2、经检索,中国专利公开(公告)号cn 112762274 b公开了及一种原油管道泄漏检测机器人,包括:支撑主体,所述原油管道泄漏检测机器人,既能迅速到达指定范围又能缓慢运行配合检测的管道内部检漏机器人,实用性增强,检测效率得到提高,但是对比文件在具体使用的时候,在管道内进行检测的时候发生倾倒不容易恢复滚动,影响检测,需要一个能够板帮助进行恢复亲到角度的结构,避免停止滚动影响检测工作,因此设计一种工业管道泄漏检测球形机器人行走机构很有必要。
技术实现思路
1、本实用新型的主要目的在于提供一种工业管道泄漏检测球形机器人行走机构,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
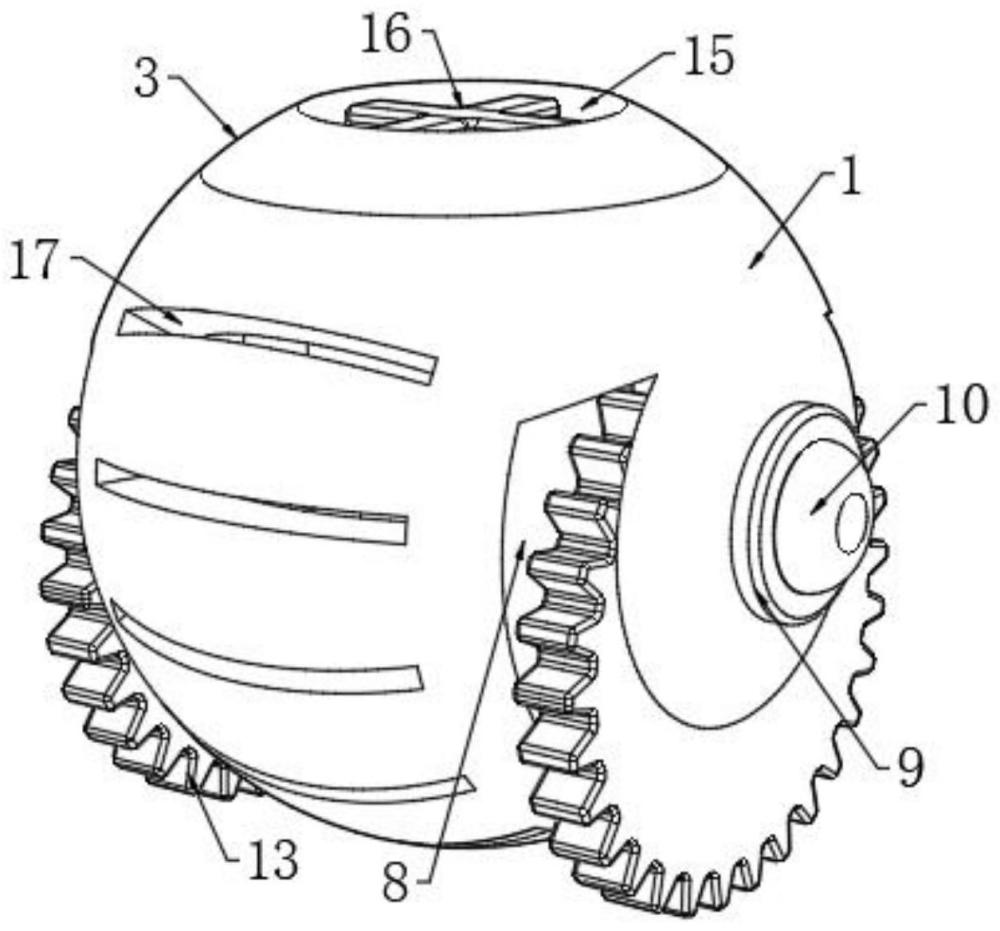
3、一种工业管道泄漏检测球形机器人行走机构,包括球形壳,所述球形壳的上表面开设有驱动室,所述球形壳靠近驱动室的上表面搭接有密封盖,所述密封盖的下表面固定连接有连接柱,所述连接柱的外表面设置有螺纹;所述驱动室靠上的内侧壁固定连接有支撑板,所述支撑板的外表面固定连接有水平检测仪,所述球形壳的左右两侧表面对称开设有驱动槽,所述球形壳靠近驱动槽的外表面对称设置有气压缸,所述气压缸的外表面活动连接有气压杆。
4、为了使得达到提供驱动力的目的,作为本实用新型一种工业管道泄漏检测球形机器人行走机构,所述驱动室靠下的内底壁安装有双轴电机,所述双轴电机的输出端均固定连接有转动杆。
5、为了使得达到方便移动的目的,作为本实用新型一种工业管道泄漏检测球形机器人行走机构,所述转动杆贯穿驱动室,所述转动杆的外表面固定连接有驱动轮。
6、为了使得达到增大轮胎抓地力的目的,作为本实用新型一种工业管道泄漏检测球形机器人行走机构,所述驱动轮的外表面开设有轮齿。
7、为了使得达到方便打开驱动室的目的,作为本实用新型一种工业管道泄漏检测球形机器人行走机构,所述密封盖的上表面开设有安装槽,所述安装槽的内底壁固定连接有转柄。
8、为了使得达到帮助散热的目的,作为本实用新型一种工业管道泄漏检测球形机器人行走机构,所述球形壳靠下的外表面开设有散热缝。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1.本实用新型中,通过球形壳、驱动室、密封盖、连接柱、螺纹、支撑板、水平检测仪、驱动槽、气压缸和气压杆的设置,球形壳满足球形机器人的外形方便在管道内进行泄漏检测,球形机器人在检测的时候,容易出现左右倾斜的问题出现,当驱动室内支撑板所固定的水平检测仪检测出不平衡的问题,就将信号发生给控制器控制驱动气压缸,使其带动气压杆顶出,通过推动管道内侧壁将球形机器人归正,避免倾倒影响检测工作的正常进行。
11、2.本实用新型中,通过安装槽、转柄和散热缝的设置,安装槽能够隐藏转柄,同时能够方便转动转柄打开密封盖对驱动室进行维修检查,散热缝能够帮助将驱动室内组件工作所产生的热量散发出去,延长组件使用年限。
技术特征:1.一种工业管道泄漏检测球形机器人行走机构,包括球形壳(1),其特征在于:所述球形壳(1)的上表面开设有驱动室(2),所述球形壳(1)靠近驱动室(2)的上表面搭接有密封盖(3),所述密封盖(3)的下表面固定连接有连接柱(4),所述连接柱(4)的外表面设置有螺纹(5);
2.根据权利要求1所述的一种工业管道泄漏检测球形机器人行走机构,其特征在于:所述驱动室(2)靠下的内底壁安装有双轴电机(11),所述双轴电机(11)的输出端均固定连接有转动杆(12)。
3.根据权利要求2所述的一种工业管道泄漏检测球形机器人行走机构,其特征在于:所述转动杆(12)贯穿驱动室(2),所述转动杆(12)的外表面固定连接有驱动轮(13)。
4.根据权利要求3所述的一种工业管道泄漏检测球形机器人行走机构,其特征在于:所述驱动轮(13)的外表面开设有轮齿(14)。
5.根据权利要求1所述的一种工业管道泄漏检测球形机器人行走机构,其特征在于:所述密封盖(3)的上表面开设有安装槽(15),所述安装槽(15)的内底壁固定连接有转柄(16)。
6.根据权利要求1所述的一种工业管道泄漏检测球形机器人行走机构,其特征在于:所述球形壳(1)靠下的外表面开设有散热缝(17)。
技术总结本技术公开了一种工业管道泄漏检测球形机器人行走机构,包括球形壳,所述球形壳的上表面开设有驱动室,所述球形壳靠近驱动室的上表面搭接有密封盖,所述密封盖的下表面固定连接有连接柱,所述连接柱的外表面设置有螺纹。该工业管道泄漏检测球形机器人行走机构,通过球形壳、支撑板、水平检测仪、驱动槽、气压缸和气压杆的设置,球形壳满足球形机器人的外形方便在管道内进行泄漏检测,球形机器人在检测的时候,容易出现左右倾斜的问题出现,当驱动室内支撑板所固定的水平检测仪检测出不平衡的问题,就将信号发生给控制器控制驱动气压缸,使其带动气压杆顶出,通过推动管道内侧壁将球形机器人归正,避免倾倒影响检测工作的正常进行。技术研发人员:苗锐,陈迎春,姚国栋,宋伟,叶伟,范效礼,王昕,李强受保护的技术使用者:新疆维吾尔自治区特种设备检验研究院技术研发日:20240131技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301366.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表