一种包装箱自动装车系统的制作方法
- 国知局
- 2024-09-19 15:02:59
本技术涉及一种包装箱装车系统,尤其是涉及一种包装箱自动装车系统,属于自动化仓储物流设备,可应用于烟草行业烟丝成品烟箱等规则包装箱的自动化装车。
背景技术:
1、仓储物流(warehousing logistics),就是利用库房、场地,储存、保管、装卸搬运、配送货物。目前在厂房内的仓储和输送部分已经实现了很高的自动化程度,但在装车这个环节,由于受场地、车辆等限制,自动化程度不高,绝大部分场景仍然利用人力或配合简单的机械助力设备进行搬运和装车。人工操作的缺点就是,人员劳动强度大、效率低、装车质量参差不齐。而现有的自动装车系统主要有机械手码垛、可升降皮带式码垛、行走龙门架式码垛等方式,这些方式也各有各的局限性,如:机械手码垛如果装车方向为平推,其最大抓取重量仅为30kg;如果装车方向为垂直提落,由于机械手是多关节机器人,其关节需要操作空间,从而使箱式货车顶层不能堆码包装箱,或只能应用于顶部空间不受限制的非箱式货车。可升降皮带式码垛虽然其机械结构简单,但也只能做到将货物输送到货车内部,而最终码垛的动作仍然由人工完成,也就是没有完全的实现自动化码垛。行走龙门架式码垛,因为其为框架结构,导致不能实现箱式货车的最顶层的堆码,从而造成厢式货车顶部空间的浪费,或者只能用于顶部空间不受限制的非箱式货车。
技术实现思路
1、为了克服现有包装箱装车方法存在的上述不足,本实用新型提供一种包装箱自动装车系统。
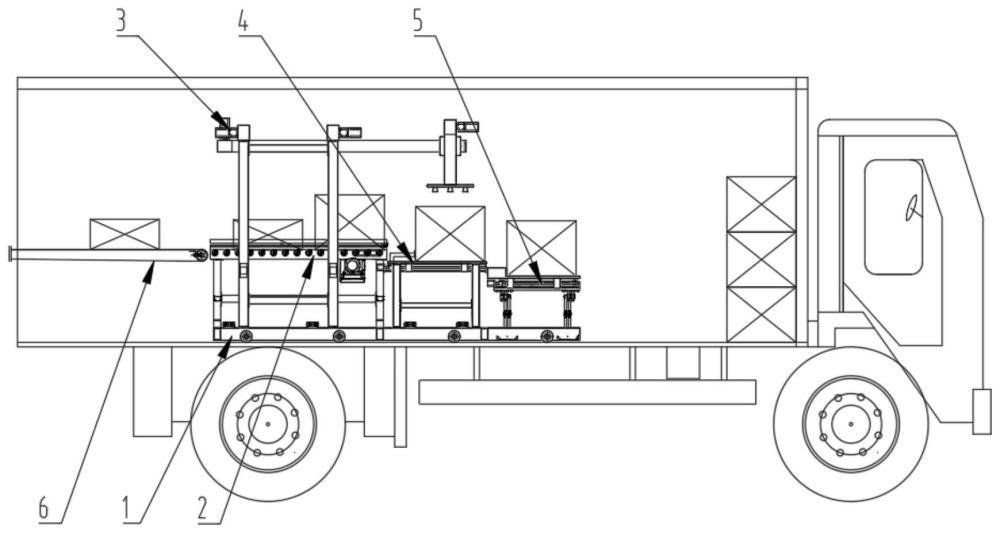
2、本实用新型解决其技术问题所采用的技术方案是:一种包装箱自动装车系统,包括皮带输送机,自动装车系统的移动底座上沿包装箱传送方向依次设置有辊道输送机、码垛平台、升降装车平台。
3、所述移动底座上固定安装有吸盘机构,真空吸盘位于辊道输送机、码垛平台的上方。
4、所述辊道输送机用于承接皮带输送机输送的包装箱。
5、所述吸盘机构将辊道输送机上的包装箱码放在码垛平台上。
6、所述码垛平台的推杆机构将码垛平台上码放的包装箱推送置于升降装车平台上。
7、所述升降装车平台将码放在升降装车平台上的包装箱推送置于运输车上完成码垛。
8、所述移动底座、吸盘机构、升降装车平台设置有用于检测定位的测距器件和/或视觉感知系统。
9、plc控制系统接收所述测距器件和/或视觉感知系统传输信号,并控制装车系统的自动运行。
10、所述移动底座由电机驱动行走进入箱式货车内部,根据包装箱装箱的进度,以包装箱长度为步长,以步进的方式从货车的最里端退到箱式货车的最外端。
11、所述辊道输送机为双规格辊道输送机,宽度不同的1#辊道输送机和2#辊道输送机横向并排设置,1#辊道输送机与2#辊道输送机之间设置有翻箱机构;所述翻箱机构将1#辊道输送机上的包装箱翻转90°置于2#辊道输送机上,或将2#辊道输送机上的包装箱翻转90°置于1#辊道输送机上。
12、所述码垛平台包括支架、码垛平板、推杆机构,码垛平板设置在支架的上方,推杆机构的推杆将码放在码垛平板上的包装箱推送置于升降装车平台上。
13、所述升降装车平台包括升降机构、装车机构,所述升降机构为刚性链式剪刀叉升降机构,所述装车机构为推杆抽板式装车机构。
14、所述升降机构上端固定安装有连接板,连接板的上方由下至上依次设置有底板、顶板,底板推杆带动底板纵向移动。
15、所述升降装车平台还包括:
16、用于驱动升降机构升降的升降推杆,升降推杆与升降机构连接。
17、用于带动底板纵向移动的底板推杆,底板推杆机构与连接板连接。
18、用于驱动顶板上包装箱纵向移动的l形推杆。
19、当底板推杆带动底板纵向向前伸出,l形推杆推动顶板上的包装箱纵向移动并置于底板上;当底板推杆带动底板纵向向后抽回,置于底板上的包装箱落到货车车厢内并码垛。
20、所述吸盘机构的支撑框架固定安装在移动底座上,支撑框架上端设置有横梁,纵向设置的悬臂梁沿横梁横向移动;与悬臂梁连接的吸盘架沿悬臂梁纵向移动;吸盘架设置有垂直移动机构;
21、所述吸盘架上的真空吸盘通过横向和/或纵向和/或垂直移动,将辊道输送机上的包装箱码放在码垛平台的码垛平板上。
22、本实用新型的有益效果是,设计合理,实现货厢最底层至最高层的堆垛,达到高效利用箱式货车空间的目的;采用真空吸盘抓取包装箱力度大,包装箱不易破散;减少人为干预,提高码垛质量和效率;采用plc控制系统对装车过程进行控制,通过获取装车过程中的实时数据,实现包装箱装车自动化。
技术特征:1.一种包装箱自动装车系统,包括皮带输送机,其特征是:
2.根据权利要求1所述包装箱自动装车系统,其特征是:所述移动底座、吸盘机构、升降装车平台设置有用于检测定位的测距器件和/或视觉感知系统。
3.根据权利要求2所述包装箱自动装车系统,其特征是:plc控制系统接收所述测距器件和/或视觉感知系统传输信号,并控制装车系统的自动运行。
4.根据权利要求1所述包装箱自动装车系统,其特征是:所述移动底座由电机驱动行走进入箱式货车内部,根据包装箱装箱的进度,以包装箱长度为步长,以步进的方式从货车的最里端退到箱式货车的最外端。
5.根据权利要求1所述包装箱自动装车系统,其特征是:所述辊道输送机为双规格辊道输送机,宽度不同的1#辊道输送机和2#辊道输送机横向并排设置,1#辊道输送机与2#辊道输送机之间设置有翻箱机构;所述翻箱机构将1#辊道输送机上的包装箱翻转90°置于2#辊道输送机上,或将2#辊道输送机上的包装箱翻转90°置于1#辊道输送机上。
6.根据权利要求1所述包装箱自动装车系统,其特征是:所述码垛平台包括支架、码垛平板、推杆机构,码垛平板设置在支架的上方,推杆机构的推杆将码放在码垛平板上的包装箱推送置于升降装车平台上。
7.根据权利要求1所述包装箱自动装车系统,其特征是:所述升降装车平台包括升降机构、装车机构,所述升降机构为刚性链式剪刀叉升降机构,所述装车机构为推杆抽板式装车机构;
8.根据权利要求7所述包装箱自动装车系统,其特征是:所述升降装车平台还包括:
9.根据权利要求1所述包装箱自动装车系统,其特征是:
技术总结一种包装箱自动装车系统。本技术的移动底座上沿包装箱传送方向依次设置有辊道输送机、码垛平台、升降装车平台;移动底座上固定安装有吸盘机构,真空吸盘位于辊道输送机、码垛平台的上方;辊道输送机用于承接皮带输送机输送的包装箱;吸盘机构将辊道输送机上的包装箱码放在码垛平台上;码垛平台的推杆机构将码垛平台上码放的包装箱推送置于升降装车平台上;升降装车平台将码放在升降装车平台上的包装箱推送置于运输车上并码垛。其有益效果是,设计合理,实现货厢最底层至最高层的堆垛,高效利用箱式货车空间;真空吸盘抓取包装箱力度大,包装箱不易破散;减少人为干预,提高码垛质量和效率;采用PLC控制系统对实现包装箱装车自动化。技术研发人员:热冰娣,帅志军,王旭,蔡雪梅,宫建华,侯小波,宋成照,高建松,鲁延灵,王海峰,张亚凯,王小波,刘星,艾士娟,丁斐,张淑红受保护的技术使用者:北京航天拓扑高科技有限责任公司技术研发日:20240307技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表