一种稳定性强的人工智能服务机器人的制作方法
- 国知局
- 2024-09-19 15:03:20
本技术涉及智能机器人,特别涉及一种稳定性强的人工智能服务机器人。
背景技术:
1、人工智能服务机器人是机器人家族中的一个年轻成员,可以分为专业领域服务机器人和个人/家庭服务机器人,人工智能服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作,在酒店、商场、银行等公共场所中广泛应用。
2、现有形式的人工智能服务机器人在公共场所服务使用时,通常利用其底部的制动轮作为驱动部件,控制机器人制动行驶位移,然而现有单一形式的制动轮制动行驶的方式,其极易受到外界颠簸路段、高低缝等因素的影响,导致其制动行驶稳定性较差,易出现侧翻、晃动的情况。为此,本领域技术人员提供了一种稳定性强的人工智能服务机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的主要目的在于提供一种稳定性强的人工智能服务机器人,可以有效解决背景技术中现有人工智能服务机器人制动行驶稳定性较差的问题。
2、为实现上述目的,本实用新型采取的技术方案为:一种稳定性强的人工智能服务机器人,包括机器人主体;
3、所述机器人主体的机身底部设置有制动机构,且机器人主体的机体内部设置有内撑架;
4、所述内撑架的支架下半部设置有收纳箱;
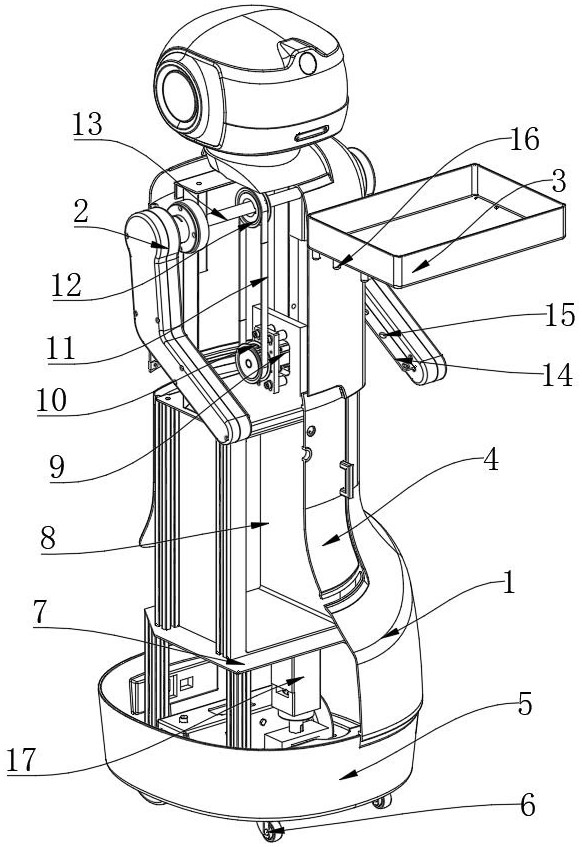
5、所述内撑架的支架上半部设置有摆动驱动机构,且摆动驱动机构的支臂前端卡扣安装有托盘;
6、所述制动机构包括安装于机器人主体机身底部的制动底座,所述制动底座的支座底部位于后侧位置处呈对称形式设置有制动电机,且每组制动电机的输出端均设置有制动轮,所述制动底座的支座底部位于前侧位置处设置有转向电机,且转向电机的输出端设置有转向轮,所述制动底座的支座底部位于边缘位置处沿其周向排布设置有多组辅助脚轮。
7、作为本实用新型再进一步的方案:两组所述制动轮与转向轮之间呈星三角对称排列设置。
8、作为本实用新型再进一步的方案:所述辅助脚轮为万向轮结构。
9、作为本实用新型再进一步的方案:所述机器人主体的机身下半部设置有与收纳箱相对应的启闭翻盖。
10、作为本实用新型再进一步的方案:所述摆动驱动机构包括安装于内撑架支架中部的旋转电机以及安装于内撑架支架顶端的旋转轴,所述旋转电机与旋转轴之间通过传动带传动连接,所述旋转轴的轴杆两端呈对称形式设置有仿生机械臂,且仿生机械臂的支臂前端设置有托载托盘的托板。
11、作为本实用新型再进一步的方案:所述旋转电机的输出端设置有皮带轮a,所述旋转轴的轴杆中部设置有皮带轮b,且皮带轮a与皮带轮b之间通过传动带传动连接。
12、作为本实用新型再进一步的方案:所述托板的板面排布开设有多组卡扣槽,所述托盘的盘体底部排布设置有与卡扣槽相对应的多组对合卡扣,且对合卡扣与卡扣槽相互过盈卡合。
13、与现有技术相比,本实用新型具有如下有益效果:
14、1.本实用新型的人工智能服务机器人在使用过程中,通过利用其底部制动机构中转向轮与制动轮的组合,控制机器人制动、转向行驶,而在制动行驶的同时,通过利用周向排布设置的辅助脚轮的辅助滚轮支撑,能够形成周向滚轮支撑状态,提高机器人的多点触地接触性能,在不影响机器人制动行驶的同时,又能够提高机器人的触地稳定性,继而提高其制动行驶稳定性,更有利于适应不同路段的行驶工作。
15、本实用新型在利用人工智能服务机器人进行服务工作时,通过利用收纳箱与启闭翻盖的收纳组合,在摆动驱动机构控制器仿生机械臂抬升,对托盘进行托载置物的组合下,具有双重置物装载能力,能够更灵活、更大量的装载物品,进行服务工作,提高智能服务机器人的灵活使用性。
技术特征:1.一种稳定性强的人工智能服务机器人,其特征在于,包括机器人主体(1);
2.根据权利要求1所述的一种稳定性强的人工智能服务机器人,其特征在于,两组所述制动轮(20)与转向轮(18)之间呈星三角对称排列设置。
3.根据权利要求1所述的一种稳定性强的人工智能服务机器人,其特征在于,所述辅助脚轮(6)为万向轮结构。
4.根据权利要求1所述的一种稳定性强的人工智能服务机器人,其特征在于,所述机器人主体(1)的机身下半部设置有与收纳箱(8)相对应的启闭翻盖(4)。
5.根据权利要求1所述的一种稳定性强的人工智能服务机器人,其特征在于,所述摆动驱动机构包括安装于内撑架(7)支架中部的旋转电机(9)以及安装于内撑架(7)支架顶端的旋转轴(13),所述旋转电机(9)与旋转轴(13)之间通过传动带(11)传动连接,所述旋转轴(13)的轴杆两端呈对称形式设置有仿生机械臂(2),且仿生机械臂(2)的支臂前端设置有托载托盘(3)的托板(14)。
6.根据权利要求5所述的一种稳定性强的人工智能服务机器人,其特征在于,所述旋转电机(9)的输出端设置有皮带轮a(10),所述旋转轴(13)的轴杆中部设置有皮带轮b(12),且皮带轮a(10)与皮带轮b(12)之间通过传动带(11)传动连接。
7.根据权利要求5所述的一种稳定性强的人工智能服务机器人,其特征在于,所述托板(14)的板面排布开设有多组卡扣槽(15),所述托盘(3)的盘体底部排布设置有与卡扣槽(15)相对应的多组对合卡扣(16),且对合卡扣(16)与卡扣槽(15)相互过盈卡合。
技术总结本技术涉及智能机器人技术领域,公开了一种稳定性强的人工智能服务机器人,所述机器人主体的机身底部设置有制动机构,所述每组制动电机的输出端均设置有制动轮,所述转向电机的输出端设置有转向轮,所述制动底座的支座底部位于边缘位置处沿其周向排布设置有多组辅助脚轮。本技术通过利用其底部制动机构中转向轮与制动轮的组合,控制机器人制动、转向行驶,而在制动行驶的同时,通过利用周向排布设置的辅助脚轮的辅助滚轮支撑,能够形成周向滚轮支撑状态,提高机器人的多点触地接触性能,在不影响机器人制动行驶的同时,又能够提高机器人的触地稳定性,继而提高其制动行驶稳定性,更有利于适应不同路段的行驶工作。技术研发人员:冯婧受保护的技术使用者:南通有爱智能科技有限公司技术研发日:20240319技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/301643.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表