一种基于机器人轨道的轨道清理装置的制作方法
- 国知局
- 2024-09-23 14:24:41
本技术涉及机器人轨道清理设备领域,尤其涉及一种基于机器人轨道的轨道清理装置。
背景技术:
1、机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业或是危险的工作,它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。市场上现有的轨道机器人可以实现移动监控、拍照、或者摄像等其他功能。
2、在使用时,轨道的内部非常容易积灰或者附着杂质,这时会造成轨道内腔不平整,使轨道机器人在运作的时候,易发生震动甚至被卡住,进而无法再正常使用,因此需要设计一种基于机器人轨道的轨道清理装置。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种基于机器人轨道的轨道清理装置。
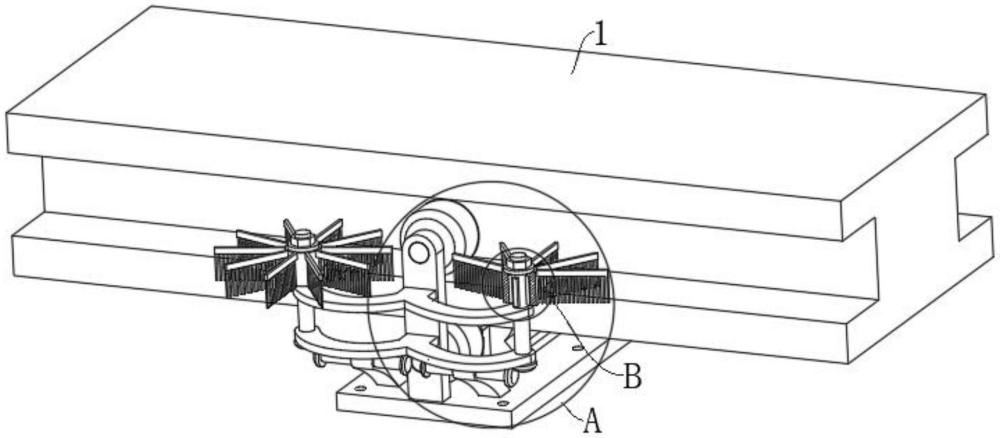
2、为了实现上述目的,本实用新型采用了如下技术方案:一种基于机器人轨道的轨道清理装置,包括轨道本体,所述轨道本体的内部和下端分别设置有第一行走轮和第二行走轮,所述第一行走轮和第二行走轮通过支撑板连接,且第一行走轮和第二行走轮均与支撑板转动连接,所述第一行走轮、第二行走轮和支撑板均设置有两个,且呈前后对称分布,两支撑板的下端固定连接有安装板,所述安装板的上端安装有驱动机构,且驱动机构与两第二行走轮连接,两支撑板相互远离的一端均固定连接有轴承架,所述轴承架的内部转动连接有第一转轴,所述第一转轴的下端安装有连动机构,且连动机构与驱动机构连接,所述第一转轴的圆周面通过连接组件可拆卸连接有转动筒,所述转动筒的圆周面固定连接有毛刷。
3、进一步,所述安装板的下端面开设有多个安装孔。
4、进一步,所述驱动机构包括双轴电机、第三转轴和第二轴承座,所述安装板的上端固定安装有双轴电机和第二轴承座,所述双轴电机的两个输出轴端均固定连接有第三转轴,两第三转轴分别与两第二行走轮固定连接。
5、进一步,所述连动机构包括第一锥齿轮、第二锥齿轮、第一轴承座、第二转轴、第三锥齿轮和第四锥齿轮,两第二行走轮远离第三转轴的一端均固定连接有第四锥齿轮,所述安装板的上端固定连接有第一轴承座,所述第一轴承座的内部转动连接有第二转轴,所述第二转轴的左右两端分别固定连接有第三锥齿轮和第一锥齿轮,所述第三锥齿轮与第四锥齿轮啮合,所述第二锥齿轮与第一锥齿轮啮合。
6、进一步,所述连动机构、毛刷和转动筒均设置有两组,且关于第一行走轮和第二行走轮呈左右对称分布。
7、进一步,所述连接组件包括螺母、垫片、固定条和安装槽,所述第一转轴的圆周面固定连接有固定条,所述转动筒的内部开设有安装槽,所述固定条与安装槽滑动连接,所述第一转轴的圆周面螺纹连接有螺母,所述螺母的下端固定连接有垫片,且垫片与第一转轴活动连接。
8、本实用新型具有如下有益效果:
9、1、与现有技术相比,该一种基于机器人轨道的轨道清理装置,通过控制驱动机构工作可以带动第二行走轮转动,再由第二行走轮带动着安装板和支撑板沿着轨道本体进行移动,在移动的过程中,会在连动机构的配合下,带动第一转轴转动,进而在连接组件的配合下,带动转动筒和毛刷转动,随着毛刷的转动可以对轨道本体的内腔进行清理作业,这样可以使得轨道本体内部积累的灰尘和杂质均被清理掉,从而方便第一行走轮沿着轨道本体顺利正常的进行移动,不易受到灰尘和杂质的影响。
10、2、与现有技术相比,该一种基于机器人轨道的轨道清理装置,通过在连接组件的作用下,方便简单快速的对转动筒和毛刷进行拆卸或安装,通过定期的更换新的转动筒和毛刷,可以使得轨道本体在毛刷和转动筒的配合下,保持着良好的清理效果。
技术特征:1.一种基于机器人轨道的轨道清理装置,包括轨道本体(1),其特征在于:所述轨道本体(1)的内部和下端分别设置有第一行走轮(12)和第二行走轮(13),所述第一行走轮(12)和第二行走轮(13)通过支撑板(11)连接,且第一行走轮(12)和第二行走轮(13)均与支撑板(11)转动连接,所述第一行走轮(12)、第二行走轮(13)和支撑板(11)均设置有两个,且呈前后对称分布,两支撑板(11)的下端固定连接有安装板(2),所述安装板(2)的上端安装有驱动机构,且驱动机构与两第二行走轮(13)连接,两支撑板(11)相互远离的一端均固定连接有轴承架(10),所述轴承架(10)的内部转动连接有第一转轴(4),所述第一转轴(4)的下端安装有连动机构,且连动机构与驱动机构连接,所述第一转轴(4)的圆周面通过连接组件可拆卸连接有转动筒(19),所述转动筒(19)的圆周面固定连接有毛刷(14)。
2.根据权利要求1所述的一种基于机器人轨道的轨道清理装置,其特征在于:所述安装板(2)的下端面开设有多个安装孔。
3.根据权利要求1所述的一种基于机器人轨道的轨道清理装置,其特征在于:所述驱动机构包括双轴电机(20)、第三转轴(21)和第二轴承座(22),所述安装板(2)的上端固定安装有双轴电机(20)和第二轴承座(22),所述双轴电机(20)的两个输出轴端均固定连接有第三转轴(21),两第三转轴(21)分别与两第二行走轮(13)固定连接。
4.根据权利要求1所述的一种基于机器人轨道的轨道清理装置,其特征在于:所述连动机构包括第一锥齿轮(3)、第二锥齿轮(5)、第一轴承座(6)、第二转轴(8)、第三锥齿轮(7)和第四锥齿轮(9),两第二行走轮(13)远离第三转轴(21)的一端均固定连接有第四锥齿轮(9),所述安装板(2)的上端固定连接有第一轴承座(6),所述第一轴承座(6)的内部转动连接有第二转轴(8),所述第二转轴(8)的左右两端分别固定连接有第三锥齿轮(7)和第一锥齿轮(3),所述第三锥齿轮(7)与第四锥齿轮(9)啮合,所述第二锥齿轮(5)与第一锥齿轮(3)啮合。
5.根据权利要求1所述的一种基于机器人轨道的轨道清理装置,其特征在于:所述连动机构、毛刷(14)和转动筒(19)均设置有两组,且关于第一行走轮(12)和第二行走轮(13)呈左右对称分布。
6.根据权利要求1所述的一种基于机器人轨道的轨道清理装置,其特征在于:所述连接组件包括螺母(17)、垫片(18)、固定条(15)和安装槽(16),所述第一转轴(4)的圆周面固定连接有固定条(15),所述转动筒(19)的内部开设有安装槽(16),所述固定条(15)与安装槽(16)滑动连接,所述第一转轴(4)的圆周面螺纹连接有螺母(17),所述螺母(17)的下端固定连接有垫片(18),且垫片(18)与第一转轴(4)活动连接。
技术总结本技术涉及机器人轨道清理设备领域,尤其涉及一种基于机器人轨道的轨道清理装置,包括轨道本体,轨道本体的内部和下端分别设置有第一行走轮和第二行走轮,第一行走轮和第二行走轮通过支撑板连接,两支撑板的下端固定连接有安装板,安装板的上端安装有驱动机构,两支撑板相互远离的一端均固定连接有轴承架,轴承架的内部转动连接有第一转轴,第一转轴的下端安装有连动机构,第一转轴的圆周面通过连接组件可拆卸连接有转动筒,转动筒的圆周面固定连接有毛刷。本技术通过驱动机构、连接机构和连接组件的配合,带动转动筒和毛刷转动,可以对轨道本体的内腔进行清理作业,具有便于清理轨道本体内部积累的灰尘和杂质的作用。技术研发人员:车忠伟,李嵩松受保护的技术使用者:威海联科智能装备有限公司技术研发日:20231229技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/302691.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表