一种用于盘类件的送料的双轴机械手的制作方法
- 国知局
- 2024-09-23 14:26:32
本技术属于机械手,具体的说是一种用于盘类件的送料的双轴机械手。
背景技术:
1、现有市场上大多送料装置多为辊筒料道或桁架机械手,占地面积大,且性能不稳定,成本也相对较高。
技术实现思路
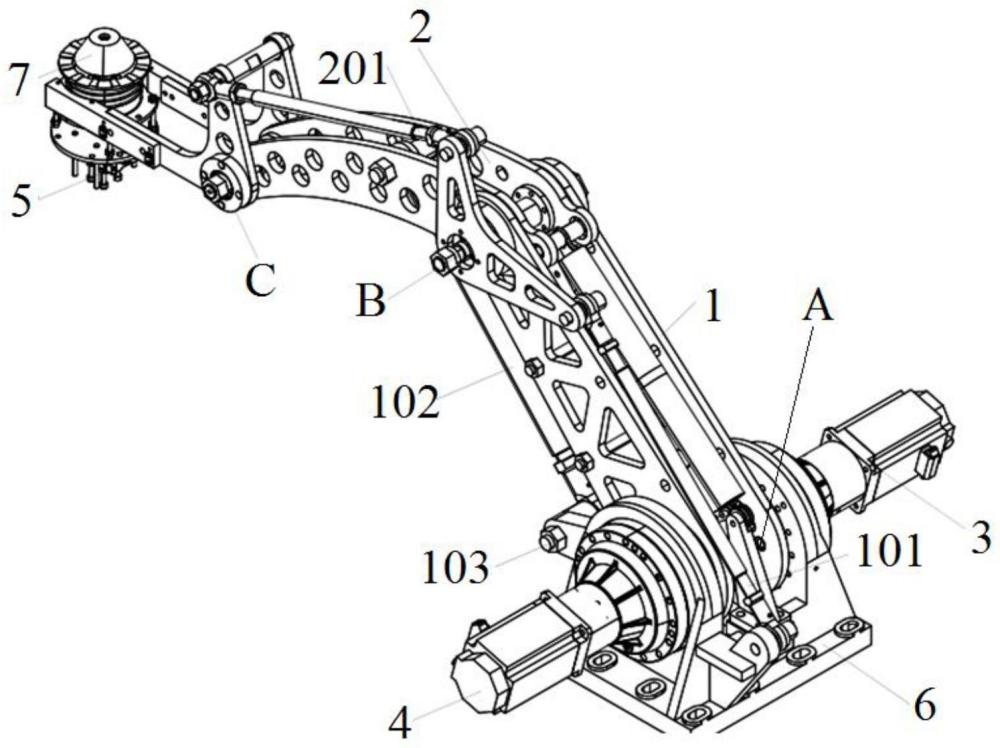
1、针对以上问题,本实用新型提供了一种用于盘类件的送料的双轴机械手,包括第一支臂、第二支臂、第一伺服电机、第二伺服电机、工件夹持装置和底座,第一支臂与底座铰接于第一铰接点,第二支臂与第一支臂铰接于第二铰接点,第二支臂与工件夹持装置铰接于第三铰接点,第一伺服电机能够驱动第二支臂以第二铰接点为轴转动,每个铰接点上均设有驱动轴承,第一支臂上设有第一辅助连杆,第一辅助连杆连接第一铰接点与第二铰接点;第二支臂上设有第二辅助连杆,第二辅助连杆连接第二铰接点与第三铰接点;第一支臂上还设有驱动杆和驱动小臂,驱动小臂固定在第一铰接点上,驱动杆能够伸缩,驱动杆一端连接驱动小臂,驱动杆另一端连接第二铰接点,第二伺服电机能够控制驱动杆伸缩;可快速方便的夹紧,托举和运输工件,性能可靠,结构简单,成本低,适用范围广,安装十分便捷,符合行业发展需求。
2、本实用新型技术方案如下,一种用于盘类件的送料的双轴机械手,包括:第一支臂、第二支臂、第一伺服电机、第二伺服电机、工件夹持装置和底座,第一支臂与底座铰接于第一铰接点,第二支臂与第一支臂铰接于第二铰接点,第二支臂与工件夹持装置铰接于第三铰接点,第一伺服电机能够驱动第二支臂以第二铰接点为轴转动,每个铰接点上均设有驱动轴承,第一支臂上设有第一辅助连杆,第一辅助连杆连接第一铰接点与第二铰接点;第二支臂上设有第二辅助连杆,第二辅助连杆连接第二铰接点与第三铰接点;第一支臂上还设有驱动杆和驱动小臂,驱动小臂固定在第一铰接点上,驱动杆能够伸缩,驱动杆一端连接驱动小臂,驱动杆另一端连接第二铰接点,第二伺服电机能够控制驱动杆伸缩。
3、进一步的,工件夹持装置包括:气缸、活塞杆、第一连接板、翻转齿条、翻转齿轮、导向轴承、夹紧轴导轨、夹紧气爪、工件夹爪、第二连接板、工件支点和平台;气缸固定在平台上,气缸带动活塞杆运动,翻转齿条通过第一连接板与活塞杆固定连接,翻转齿条与翻转齿轮配合,翻转齿条紧贴导向轴承,当气缸活塞杆伸出时,带动翻转齿条在导向轴承的限制下运动,翻转齿条带动翻转齿轮运动,完成180°的工件夹持装置翻转;工件支点固定在平台上,夹紧轴导轨固定在平台上,两个第二连接板与夹紧轴导轨滑动配合,多个工件夹爪固定在第二连接板上,夹紧气爪移动能够带动第二连接板沿夹紧导轨运动。
4、进一步的,工件夹持装置还包括滑环,气管以及气缸信号线通过滑环安装。
5、进一步的,第一伺服电机和第二伺服电机均设置在第一铰接点上。
6、进一步的,工件夹持装置在第一支臂或第二支臂运动时与地面平行。
7、进一步的,工件夹持装置上设有工件定位托盘。
8、本实用新型的有益效果为:
9、可快速方便的夹紧,托举和运输工件,性能可靠,结构简单,成本低,适用范围广,安装十分便捷,符合行业发展需求。
技术特征:1.一种用于盘类件的送料的双轴机械手,其特征在于,包括:第一支臂、第二支臂、第一伺服电机、第二伺服电机、工件夹持装置和底座,第一支臂与底座铰接于第一铰接点,第二支臂与第一支臂铰接于第二铰接点,第二支臂与工件夹持装置铰接于第三铰接点,第一伺服电机能够驱动第二支臂以第二铰接点为轴转动,每个铰接点上均设有驱动轴承,第一支臂上设有第一辅助连杆,第一辅助连杆连接第一铰接点与第二铰接点;第二支臂上设有第二辅助连杆,第二辅助连杆连接第二铰接点与第三铰接点;第一支臂上还设有驱动杆和驱动小臂,驱动小臂固定在第一铰接点上,驱动杆能够伸缩,驱动杆一端连接驱动小臂,驱动杆另一端连接第二铰接点,第二伺服电机能够控制驱动杆伸缩。
2.如权利要求1所述的一种用于盘类件的送料的双轴机械手,其特征在于,工件夹持装置包括:气缸、活塞杆、第一连接板、翻转齿条、翻转齿轮、导向轴承、夹紧轴导轨、夹紧气爪、工件夹爪、第二连接板、工件支点和平台;气缸固定在平台上,气缸带动活塞杆运动,翻转齿条通过第一连接板与活塞杆固定连接,翻转齿条与翻转齿轮配合,翻转齿条紧贴导向轴承,当气缸活塞杆伸出时,带动翻转齿条在导向轴承的限制下运动,翻转齿条带动翻转齿轮运动,完成180°的工件夹持装置翻转;工件支点固定在平台上,夹紧轴导轨固定在平台上,两个第二连接板与夹紧轴导轨滑动配合,多个工件夹爪固定在第二连接板上,夹紧气爪移动能够带动第二连接板沿夹紧导轨运动。
3.如权利要求2所述的一种用于盘类件的送料的双轴机械手,其特征在于,工件夹持装置还包括滑环,气管以及气缸信号线通过滑环安装。
4.如权利要求1至3任一项所述的一种用于盘类件的送料的双轴机械手,其特征在于,第一伺服电机和第二伺服电机均设置在第一铰接点上。
5.如权利要求4所述的一种用于盘类件的送料的双轴机械手,其特征在于,工件夹持装置在第一支臂或第二支臂运动时与地面平行。
6.如权利要求4所述的一种用于盘类件的送料的双轴机械手,其特征在于,工件夹持装置上设有工件定位托盘。
技术总结本技术公开了一种用于盘类件的送料的双轴机械手,属于机械手技术领域,具体为第一支臂与底座铰接于第一铰接点,第二支臂与第一支臂铰接于第二铰接点,第二支臂与工件夹持装置铰接于第三铰接点,第一伺服电机能够驱动第二支臂以第二铰接点为轴转动,每个铰接点上均设有驱动轴承,第一支臂上设有第一辅助连杆,第一辅助连杆连接第一铰接点与第二铰接点;第二支臂上设有第二辅助连杆,第二辅助连杆连接第二铰接点与第三铰接点;第一支臂上还设有驱动杆和驱动小臂,驱动小臂固定在第一铰接点上,驱动杆能够伸缩,驱动杆一端连接驱动小臂,驱动杆另一端连接第二铰接点,第二伺服电机能够控制驱动杆伸缩,本技术性能可靠,结构简单。技术研发人员:崔阳,菅齐,祝鑫,任健,王冠一受保护的技术使用者:吉林省金沙数控机床股份有限公司技术研发日:20240111技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/302890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表