机械手末端三抓执行装置的制作方法
- 国知局
- 2024-09-23 14:30:16
本技术涉及机械手,尤其是涉及机械手末端执行装置。
背景技术:
1、机器人末端机械手是工业机器人中非常重要的组成部分,它们通常连接在机器人的末端关节上,并具备特定功能,如夹持、握紧、辅助支撑和定位等。在实际应用中,通常由机器人确定末端执行器的位置和姿态,而由末端执行器完成具体的操作任务。
2、机器人末端机械手有多种类型,常见的有吸附式、关节式、柔性以及专用机械手等,这些不同类型的机械手具有各自的特点和应用场景。在上下料机械手中,通常使用固定式抓手来完成物料的抓取与放置。然而,固定式抓手存在诸多缺陷,例如容易因物料形状不规则或者抓取位置不正确而造成抓取失败,导致生产效率低下。
技术实现思路
1、本实用新型的目的在于提供一种机械手末端三抓执行装置,抓取方式与维度多变,适用不同产品与使用领域,提升生产效率。
2、为达到上述目的,本实用新型采用如下技术方案:
3、机械手末端三抓执行装置,其具有:
4、安装底板,
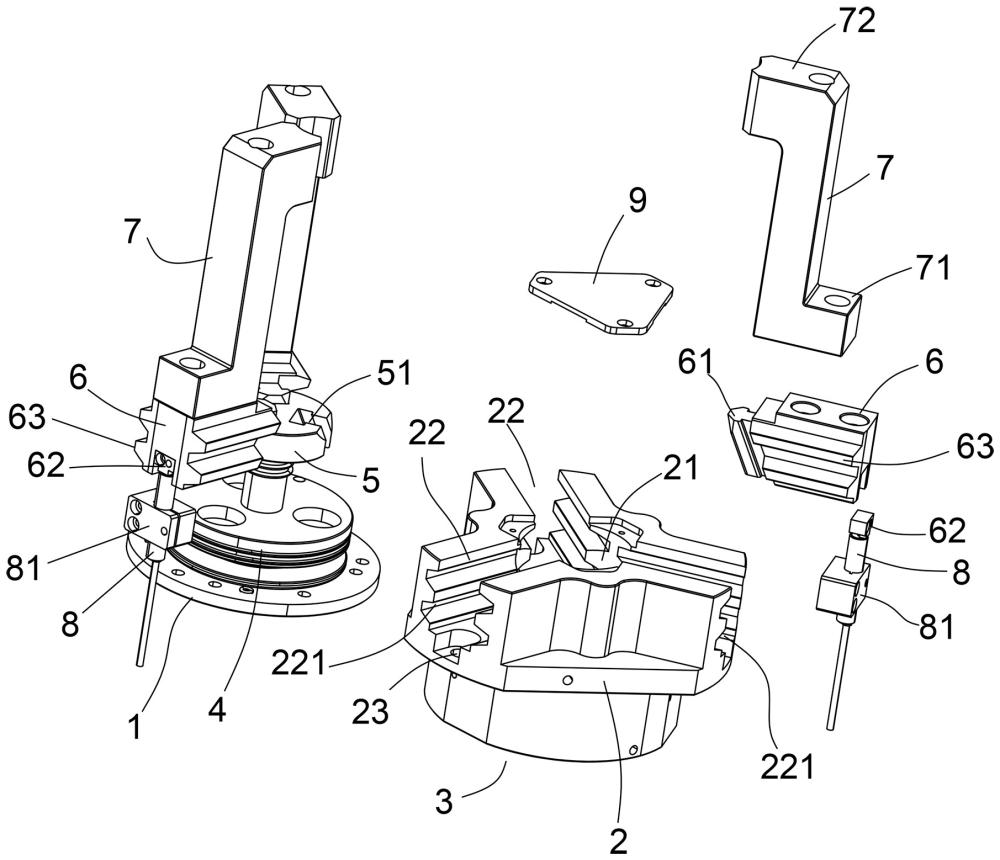
5、支撑座,该支撑座安装在安装底板的上侧面上并与安装底板一起围合构建活塞腔;支撑座的上端设有浮动腔及从该浮动腔向外辐射延伸的滑槽,滑槽有三条并围绕浮动腔均匀布置;
6、活塞,该活塞对应安装在活塞腔中,且活塞的伸缩端伸到浮动腔中并与驱动盘体连接,该驱动盘体的周缘上设有驱动斜槽,驱动斜槽有三条并分别与滑槽对应;
7、三个滑块,分别对应三条滑槽安装在支撑座上,且滑块的内端设有楔块部,该楔块部与驱动斜槽关联组合;
8、三个夹爪,分别对应安装在三个滑块上;
9、所述安装底板上设有的气道,用于将气体引进至活塞腔,使活塞运动并带着驱动盘体在浮动腔中浮动,通过驱动斜槽和楔块部协作来带动滑块在滑槽中滑动,使三个夹爪相互靠近或远离,建立夹持状态或松开状态。
10、上述方案进一步是,所述支撑座上的浮动腔与活塞腔形成上下层关系且同轴,三个夹爪相互靠近的汇集点在浮动腔的正上方。
11、上述方案进一步是,所述支撑座上还设有感应元件,该感应元件协作滑块上预设的感应部来控制滑块的行程。
12、上述方案进一步是,所述滑槽的内侧壁设有导向齿槽,对应的在滑块相应侧壁上设有导向齿,导向齿与导向齿槽啮合协作引导滑块滑动。
13、上述方案进一步是,所述支撑座的上端组装有盖板,该盖板遮盖浮动腔,驱动盘体在盖板的下方浮动。
14、上述方案进一步是,所述夹爪为z字状,夹爪的一端弯折为固定部,夹爪的另一端弯折为夹持部;固定部贴合滑块的上侧面并通过螺钉锁紧,夹持部向三个夹爪相互靠近的汇集点方向凸伸。
15、上述方案进一步是,所述驱动斜槽的断面形状为具有收口的c字形,楔块部设计为与驱动斜槽匹配组合的t字形体,且楔块部卡入驱动斜槽中并能朝驱动斜槽的倾斜方向运动,驱动斜槽与楔块部之间通过斜面推挤作用来带动滑块在滑槽中滑动。
16、本实用新型通过活塞运动并带着驱动盘体在浮动腔中浮动,由驱动盘体的驱动斜槽和滑块的楔块部协作来带动滑块在滑槽中滑动,夹爪跟随滑块运动,使三个夹爪相互靠近或远离,建立夹持状态或松开状态,在夹持过程,驱动斜槽和楔块部协作,使得夹爪可以在物料表面自适调节,从而避免因物料形状不规则或者抓取位置不正确而造成抓取失败的情况。
技术特征:1.机械手末端三抓执行装置,其特征在于,具有:
2.根据权利要求1所述的机械手末端三抓执行装置,其特征在于,所述支撑座(2)上的浮动腔(21)与活塞腔(3)形成上下层关系且同轴,三个夹爪(7)相互靠近的汇集点在浮动腔(21)的正上方。
3.根据权利要求1所述的机械手末端三抓执行装置,其特征在于,所述支撑座(2)上还设有感应元件(8),该感应元件(8)协作滑块(6)上预设的感应部(62)来控制滑块(6)的行程。
4.根据权利要求1所述的机械手末端三抓执行装置,其特征在于,所述滑槽(22)的内侧壁设有导向齿槽(221),对应的在滑块(6)相应侧壁上设有导向齿(63),导向齿(63)与导向齿槽(221)啮合协作引导滑块(6)滑动。
5.根据权利要求1所述的机械手末端三抓执行装置,其特征在于,所述支撑座(2)的上端组装有盖板(9),该盖板(9)遮盖浮动腔(21),驱动盘体(5)在盖板(9)的下方浮动。
6.根据权利要求1或 2所述的机械手末端三抓执行装置,其特征在于,所述夹爪(7)为z字状,夹爪(7)的一端弯折为固定部(71),夹爪(7)的另一端弯折为夹持部(72);固定部(71)贴合滑块(6)的上侧面并通过螺钉锁紧,夹持部(72)向三个夹爪(7)相互靠近的汇集点方向凸伸。
7.根据权利要求1所述的机械手末端三抓执行装置,其特征在于,所述驱动斜槽(51)的断面形状为具有收口的c字形,楔块部(61)设计为与驱动斜槽(51)匹配组合的t字形体,且楔块部(61)卡入驱动斜槽(51)中并能朝驱动斜槽(51)的倾斜方向运动,驱动斜槽(51)与楔块部(61)之间通过斜面推挤作用来带动滑块(6)在滑槽(22)中滑动。
技术总结本技术涉及机械手末端三抓执行装置,支撑座安装在安装底板的上侧面上并与安装底板一起围合构建活塞腔;支撑座的上端设有浮动腔及三条滑槽;活塞对应安装在活塞腔中,且活塞的伸缩端伸到浮动腔中并与驱动盘体连接,驱动盘体的周缘上设有驱动斜槽,驱动斜槽有三条并分别与滑槽对应;三个滑块分别对应三条滑槽安装在支撑座上,且滑块设有楔块部连接驱动斜槽;三个夹爪分别对应安装在三个滑块上;活塞运动并带着驱动盘体在浮动腔中浮动,通过驱动斜槽和楔块部协作来带动滑块在滑槽中滑动,使三个夹爪相互靠近或远离,建立夹持状态或松开状态,夹爪可以在物料表面自适调节,从而避免因物料形状不规则或者抓取位置不正确而造成抓取失败的情况。技术研发人员:罗文库,陈植,黄家可,何德平,谢继忠受保护的技术使用者:福美仕智能科技(东莞)有限公司技术研发日:20240129技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/303211.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
多方位压件夹具的制作方法
下一篇
返回列表