一种可平稳悬停的水下机器人
- 国知局
- 2024-09-23 14:40:02
本技术涉及水下机器人,具体为一种可平稳悬停的水下机器人。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,当水下机器人在运行的过程中运动安稳性是保证水下机器人安全可靠作业的关键,为此提出一种可平稳悬停的水下机器人进行运行。
2、现有的可参考公告号为:cn218022129u的中国实用新型专利,其公开了一种水下机器人稳定装置,该种水下机器人稳定装置的设置,包括前套环和后套环,所述前套环和后套环顶部的两侧分别连接有一根胶棒,所述前套环底端的两侧分别设置有一个前喷口,所述后套环底端的两侧分别设置有一个后喷口,所述前套环顶端的设置有第一聚水仓和第一泵机,装置采用外挂的方式,套装在水下机器人的外部,不会影响到机器人本身的行进,同时采用硅胶的套环,可装配在不同类型的机器人上,便于使用,另外由于采用外挂的方式,可根据实际情况选择使用,在面对河流交汇或河道较为险峻,导致水底暗流较多的环境时选择使用,而水流平稳,或静水内时,则可选择不外挂使用,降低对机器人本身的影响。
3、在现有的可平稳悬停的水下机器人使用的过程中,由于水下机器人在运行的过程中会因为机器的重量和浮力大小等原因,会导致水下机器人在水域中发生侧翻的情况,使机器探索失败,有待改进,因此,本领域技术人员提供了一种可平稳悬停的水下机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种可平稳悬停的水下机器人,以解决上述背景技术中提出的现有的可平稳悬停的水下机器人平稳运行和防止侧翻的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
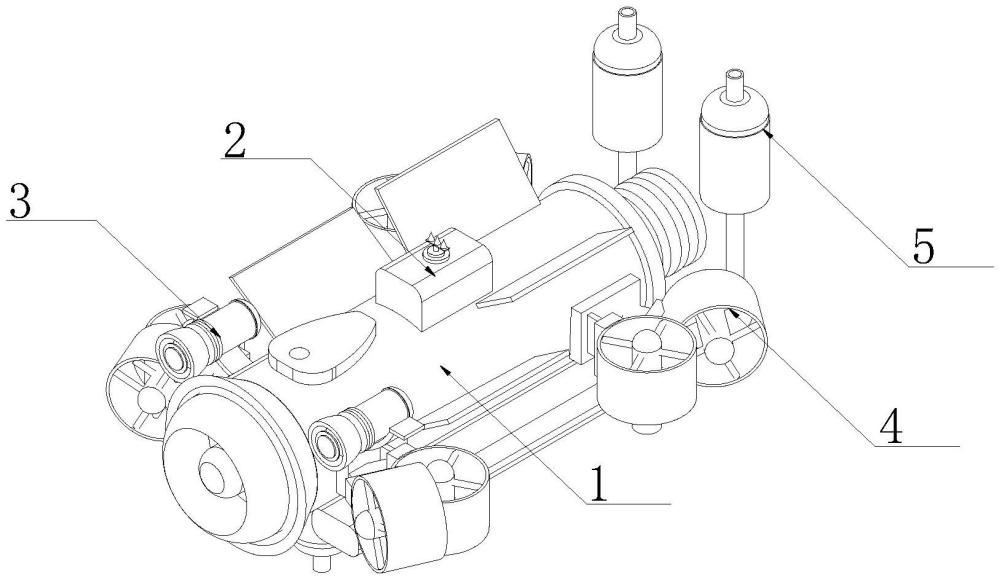
3、一种可平稳悬停的水下机器人,包括机器装置,所述机器装置的上方安装有设备悬停挂置机构,所述机器装置的后方连接有设备载重平衡机构,所述设备悬停挂置机构包括:安装于所述机器装置上方的钩置箱,所述钩置箱的内部安装有用于设备收缩的下拉器,且所述下拉器的上方连接有钩绳,并且所述钩绳的上方连接有圆环,所述圆环的上方设置有用于和物体固定连接的钩锥器;
4、所述设备载重平衡机构包括:连接于所述机器装置后方的浮力瓶,所述机器装置的内部安装有用于设备进出水量控制的驱动棒,且所述驱动棒的两侧设置有孔塞环,并且所述机器装置的下方前侧安装有用于减少载重的出水瓶。
5、优选的,所述机器装置包括:
6、照明灯,所述照明灯设置于所述机器装置的上方两侧,且所述浮力瓶的前方安装有活动翼;
7、停器板,所述停器板设置于所述机器装置的下方两侧;所述照明灯为所述机器装置提供光线。
8、优选的,所述停器板包括:
9、转动带,所述转动带设置于所述停器板的外部,且所述停器板的中间连接有驱动器;
10、绑带,所述绑带连接于所述驱动器的上方两侧;所述驱动器可以使所述转动带进行移动。
11、优选的,所述机器装置的后方贯穿安装有圆孔,且所述驱动棒的外部设置有载重筒,并且所述孔塞环的侧边安装有移动器,所述载重筒的前方和所述出水瓶之间连接有连接管,且所述载重筒通过所述浮力瓶和所述圆孔可将外部的水引进,所述孔塞环的大小和所述圆孔的大小一致;所述载重筒的设置可以为所述机器装置内部增加载重量。
12、优选的,所述钩锥器的下方设置有发力器,且所述发力器的下方连接有连接柱,并且连所述接柱和所述圆环之间设置有钩柱,所述钩锥器通过所述发力器、所述连接柱、所述钩柱、所述圆环和所述钩绳之间构成连接关系,且所述钩锥器通过所述发力器可进行上升,并且所述钩绳的底部一端连接于所述下拉器的上方;所述钩绳可以使所述机器装置固定在物体的下方。
13、优选的,所述转动带和所述驱动器的设置可以使所述机器装置进行左右平移,且所述机器装置通过所述绑带和所述驱动器之间连接;所述转动带便于所述机器装置进行左右移动。
14、优选的,述照明灯和所述浮力瓶均通过所述机器装置的中点呈左右对称关系,且所述活动翼设置于所述机器装置的左右两侧;所述活动翼的设置便于所述机器装置在水下运行调整。
15、与现有技术相比,本实用新型的有益效果是:
16、1、该种可平稳悬停的水下机器人,通过在机器装置的后方设置有浮力瓶,且浮力瓶通过圆孔可以将外部的水引进至载重筒的内部,增加机器装置内部的重量,同时根据移动器将孔塞环进行堵住或者打开的设置,便于根据机器装置的情况控制浮力瓶水量进出的多少,再根据出水瓶的设置将机器装置内部的水进行排出,使机器装置可以保持平衡,同时根据机器装置本身的重量和水的浮力对载重情况进行调整,使机器装置可以平稳运行;
17、2、该种可平稳悬停的水下机器人,通过在机器装置的上方设置有钩置箱,钩置箱的内部设置有下拉器,且下拉器的上方连接有钩绳,以及钩绳的上方分别连接有圆环、钩柱、连接柱、钩锥器以及发力器,并且钩锥器位于钩置箱的上方,当机器装置在水下停稳后,可以利用发力器将钩锥器进行向上发力,使其固定在上方的固定物体上,同时增加机器装置的外部稳定性,再根据下拉器的设置,可以将钩绳以及钩绳上方的设备进行下拉,使钩锥器安装在钩置箱的上方,此设计可以使机器装置长时间地在一个地点时利用外界设备进行固定,同时也可以避免水流控制等意外引起设备的侧翻情况出现,使机器装置可以平稳悬停。
技术特征:1.一种可平稳悬停的水下机器人,包括机器装置(1),所述机器装置(1)的上方安装有设备悬停挂置机构,所述机器装置(1)的后方连接有设备载重平衡机构,其特征在于,所述设备悬停挂置机构包括:安装于所述机器装置(1)上方的钩置箱(2),所述钩置箱(2)的内部安装有下拉器(21),且所述下拉器(21)的上方连接有钩绳(22),并且所述钩绳(22)的上方连接有圆环(23),所述圆环(23)的上方设置有钩锥器(26);
2.根据权利要求1所述的一种可平稳悬停的水下机器人,其特征在于:
3.根据权利要求2所述的一种可平稳悬停的水下机器人,其特征在于:
4.根据权利要求1所述的一种可平稳悬停的水下机器人,其特征在于:
5.根据权利要求1所述的一种可平稳悬停的水下机器人,其特征在于:
6.根据权利要求3所述的一种可平稳悬停的水下机器人,其特征在于:
7.根据权利要求2所述的一种可平稳悬停的水下机器人,其特征在于:
技术总结本技术公开了一种可平稳悬停的水下机器人,涉及水下机器人技术领域,包括机器装置,所述机器装置的上方安装有设备悬停挂置机构,所述机器装置的后方连接有设备载重平衡机构。该种可平稳悬停的水下机器人,通过在机器装置的后方设置有浮力瓶,且浮力瓶通过圆孔可以将外部的水引进至载重筒的内部,增加机器装置内部的重量,同时根据移动器将孔塞环进行堵住或者打开的设置,便于根据机器装置的情况控制浮力瓶水量进出的多少,再根据出水瓶的设置将机器装置内部的水进行排出,使机器装置可以保持平衡,同时根据机器装置本身的重量和水的浮力对载重情况进行调整,使机器装置可以平稳运行。技术研发人员:王希卓,李浩浩,曹金辉,张焕荣,马浩原受保护的技术使用者:郑州大学技术研发日:20231019技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/303793.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表