一种关节电机单元及应用其的足式机器人的制作方法
- 国知局
- 2024-09-23 14:41:39
本技术涉及机器人关节,尤其涉及一种关节电机单元及应用其的足式机器人。
背景技术:
1、随着计算机技术跟自动化技术的飞速发展,结合仿生学领域的深入研究,当今对智能机器人的研究与应用热情也跟着进一步提高,作为机器人系统的关键核心零部件之一,针对关节伺服电机执行器的应用需求也越来越多。例如授权公告号为cn216657988u的中国实用新型专利公开了一种协作机器人关节及协作机器人,其中就有无框力矩电机和谐波减速器来驱动,对于机器人(人形机器人)上的关节电机普遍采用无框力矩电机和谐波减速器的形式,这样就会使得力矩控制精度较高,由于谐波减速器高度非常高,不便于集成安放,其次其在运行过程中就会使得反驱力较大,不利于摆动控制性能,同时速度响应较慢,无法满足机器人高动态的速度响应需求,因此有必要作出改进。
技术实现思路
1、(一)需要解决的技术问题
2、针对现有技术中的不足,本实用新型提供了一种关节电机单元及应用其的足式机器人,其设计合理,降低了机器人一体化关节电机加工制造难道,减小了机器人关节电机高度,提高可安装性和集成度,满足了高动态对电机速度响应的需求。
3、(二)需要采取的技术方案
4、为了实现上述目的,本实用新型所采取的技术方案是:
5、一种关节电机单元,包括电机定子以及设置在所述电机定子外围的电机转子,所述电机转子相对所述电机定子可转动,所述电机定子内部安装有减速器组件,且所述电机转子的一端面上设置有后端盖,所述后端盖与所述电机转子之间设置有编码器,且所述后端盖上设置有驱动器。
6、作为优选技术措施,所述电机定子内部开有一中心孔,所述中心孔上安装有所述减速器组件。
7、作为优选技术措施,所述减速器组件包括齿轮箱以及行星减速器,所述行星减速器位于所述齿轮箱中,且所述行星减速器上的太阳齿轮从所述电机转子中延伸出去。
8、作为优选技术措施,所述编码器包括设置在所述后端盖上的主板以及设置在所述电机转子端面上的磁环,所述主板和磁环平行安装在所述电机转子端面与所述后端盖之间,且所述主板和磁环之间的间距为2mm~5mm之间。
9、作为优选技术措施,所述电机转子与所述后端盖之间设置有轴承。
10、作为优选技术措施,所述后端盖上设置有机壳,所述机壳罩住所述电机转子。
11、本实用新型还提供了一种足式机器人,所述足式机器人包括如上述的机器人集成关节单元。
12、(三)需要达到的技术效果
13、与现有技术相比,本实用新型的有益效果是:
14、其一,本实用新型包括电机定子以及设置在电机定子外围的电机转子,电机转子相对电机定子可转动,电机定子内部安装有减速器组件,且电机转子的一端面上设置有后端盖,后端盖与电机转子之间设置有编码器,且后端盖上设置有驱动器,其通过减速器组件设计在电机定子内部,电机定子外围的电机转子,电机转子相对电机定子可转动,设计合理,降低了机器人一体化关节电机加工制造难道,减小了机器人关节电机高度,提高可安装性和集成度,满足了高动态对电机速度响应的需求。
15、其二,本实用新型足式机器人包括如上述的机器人集成关节单元,此种应用在足式机器人上更加有利于在运行过程中就会使得反驱力较小,利于摆动控制性能,同时速度响应更快,满足机器人高动态的速度响应需求。
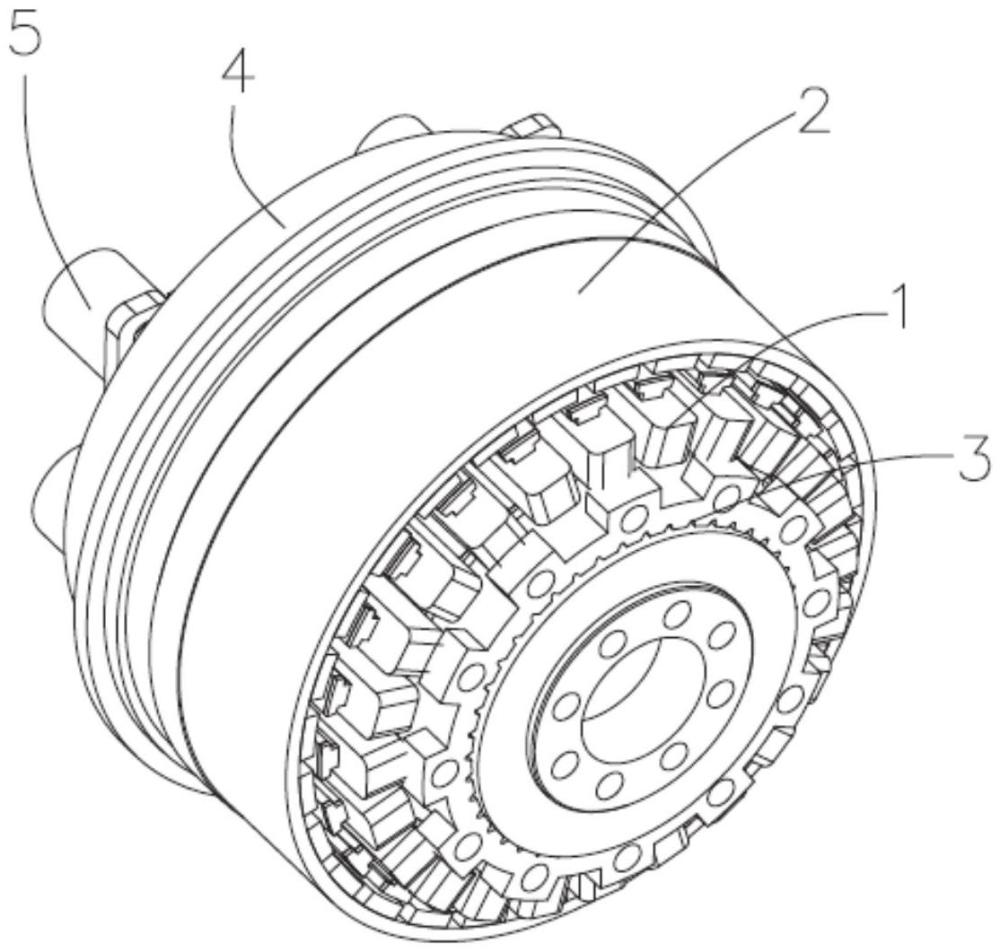
技术特征:1.一种关节电机单元,其特征在于:包括电机定子(1)以及设置在所述电机定子(1)外围的电机转子(2),所述电机转子(2)相对所述电机定子(1)可转动,所述电机定子(1)内部安装有减速器组件(3),且所述电机转子(2)的一端面上设置有后端盖(4),所述后端盖(4)与所述电机转子(2)之间设置有编码器(5),且所述后端盖(4)上设置有驱动器(6)。
2.如权利要求1所述的关节电机单元,其特征在于:所述电机定子(1)内部开有一中心孔,所述中心孔上安装有所述减速器组件(3)。
3.如权利要求2所述的关节电机单元,其特征在于:所述减速器组件(3)包括齿轮箱(31)以及行星减速器(32),所述行星减速器(32)位于所述齿轮箱(31)中,且所述行星减速器(32)上的太阳齿轮从所述电机转子(2)中延伸出去。
4.如权利要求1或2或3所述的关节电机单元,其特征在于:所述编码器(5)包括设置在所述后端盖(4)上的主板(51)以及设置在所述电机转子(2)端面上的磁环(52),所述主板(51)和磁环52平行安装在所述电机转子(2)端面与所述后端盖(4)之间,且所述主板(51)和磁环(52)之间的间距为2mm~5mm之间。
5.如权利要求1或2或3所述的关节电机单元,其特征在于:所述电机转子(2)与所述后端盖(4)之间设置有轴承(7)。
6.如权利要求1或2或3所述的关节电机单元,其特征在于:所述后端盖(4)上设置有机壳(8),所述机壳(8)罩住所述电机转子(2)。
7.一种足式机器人,其特征在于:所述足式机器人包括如权利要求1~6任一所述的机器人集成关节单元。
技术总结本技术公开了一种关节电机单元及应用其的足式机器人,包括电机定子以及设置在所述电机定子外围的电机转子,所述电机转子相对所述电机定子可转动,所述电机定子内部安装有减速器组件,且所述电机转子的一端面上设置有后端盖,所述后端盖与所述电机转子之间设置有编码器,且所述后端盖上设置有驱动器。所述足式机器人包括如上述的机器人集成关节单元。本技术其设计合理,降低了机器人一体化关节电机加工制造难道,也减小了机器人关节电机高度,提高可安装性和集成度,满足了高动态对电机速度响应的需求。技术研发人员:杨冠华受保护的技术使用者:深圳市派新斯韦科技有限公司技术研发日:20231031技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/303902.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表