医生操作台的制作方法
- 国知局
- 2024-09-23 14:51:30
本技术涉及一种医生操作台,属于医疗器械领域。
背景技术:
1、当今医疗技术越来越发达,很多高难度的手术由医疗设备来来完成。医生通过操作医生操作台控制手术机器人协作完成。那么医生操作台的控制设备的灵活性、与医生动作的适配性就相当重要。现有技术中操作台的机械控制臂一般都是大臂、小臂和控制终端构成。大臂和小臂之间可以单维度转动、小臂和控制终端之间可单维度转动,控制终端自身还可实现相对转动。这种由多个单维度的转动构成一个整体多维度的转动关系。但是相对人体灵活的活动关节来说,灵活性和同步性相对较差,增加了操作难度。
技术实现思路
1、本实用新型的提供的一种医生操作台,机械大臂和机械小臂的连接关节可以实现四个维度的转动,四维度转动复合联动可以实现任意方向、任意角度的转动,大大提高了整个机械手臂的灵活性,提供了高度适配的机械手臂;以克服现有技术的缺陷。
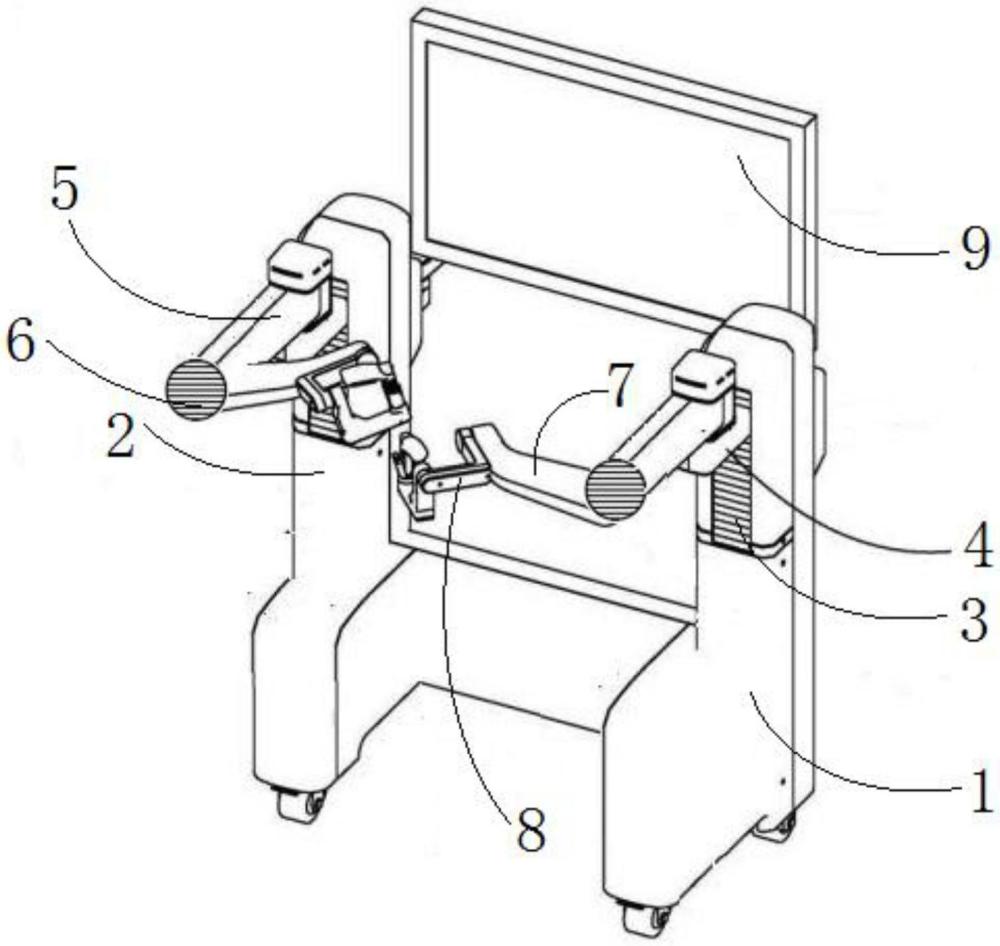
2、本实用新型提供一种医生操作台,包括:至少一组机械手,每组机械手包括:机械大臂5、万向关节6、机械小臂7;万向关节6包括第一关节61、第二关节62、第一旋轴63和第二旋轴64;第一关节61的前端具有平行设置的两个第一固定耳611,第一旋轴63的两端分别穿过两个第一固定耳611上对应的孔,第一旋轴63与第一固定耳611可相对旋转;第一关节61的后端与机械大臂5的一端可旋转连接;第二旋轴64与第一旋轴63垂直设置,两个固定连接;第二关节62的前端具有平行设置的两个第二固定耳621;第二旋轴64两侧的分别穿过两个第二固定耳621上对应的孔,第二旋轴64与第二固定耳621可相对旋转;第二关节62的后端与机械小臂7的一端可旋转连接。
3、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:第一关节61的后端具有第一自转轴612;机械大臂5上具有与第一自转轴612相配的大臂旋转孔;第一自转轴612设置在机械大臂5的大臂旋转孔内,且可在内旋转。
4、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:第二关节62的后端具有第二自转轴622;机械小臂7上具有与第二自转轴622相配的小臂旋转孔;第二自转轴622设置在机械小臂7的小臂旋转孔内,且可在内旋转。
5、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:机械手还包括操作手8;操作手8与机械小臂7的另一端可旋转连接。
6、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:万向关节6以及机械大臂5、机械小臂7与之连接的位置具有弹性保护罩。
7、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:还包括移动底座1、至少一个支撑柱2;支撑柱2与机械手一一对应;机械手还包括:大臂支撑座4;支撑柱2固定在移动底座1上;大臂支撑座4与支撑柱2可垂直移动连接;机械大臂5的另一端与大臂支撑座4可旋转连接。
8、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:大臂支撑座4与支撑柱2通过滚珠丝杆3实现可垂直移动连接;滚珠丝杆的螺杆垂直设置在支撑柱2内,两端与支撑柱2可旋转连接;大臂支撑座4固定在滚珠丝杆的螺母上。
9、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:滚珠丝杆3的外侧设置有弹性保护罩。
10、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:支撑柱2和机械手的数量为两个,两个机械手对称设置。
11、进一步,本实用新型提供一种医生操作台,还可以具有这样的特征:还包括显示器9,显示器9设置在两个支撑柱2的背面。
技术特征:1.一种医生操作台,其特征在于:包括,至少一组机械手,每组所述机械手包括:机械大臂(5)、万向关节(6)、机械小臂(7);
2.如权利要求1所述的医生操作台,其特征在于:
3.如权利要求1所述的医生操作台,其特征在于:
4.如权利要求1所述的医生操作台,其特征在于:
5.如权利要求1所述的医生操作台,其特征在于:
6.如权利要求1所述的医生操作台,其特征在于:
7.如权利要求6所述的医生操作台,其特征在于:
8.如权利要求7所述的医生操作台,其特征在于:
9.如权利要求1至8中任意一项所述的医生操作台,其特征在于:
10.如权利要求9所述的医生操作台,其特征在于:
技术总结本技术提供一种医生操作台,第一关节的前端具有平行设置的两个第一固定耳,第一旋轴的两端分别穿过两个第一固定耳上对应的孔,第一旋轴与第一固定耳可相对旋转;第一关节的后端与机械大臂的一端可旋转连接;第二旋轴与第一旋轴垂直设置,两个固定连接;第二关节的前端具有平行设置的两个第二固定耳;第二旋轴两侧的分别穿过两个第二固定耳上对应的孔,第二旋轴与第二固定耳可相对旋转;第二关节的后端与机械小臂的一端可旋转连接。其优点在于机械大臂和机械小臂的连接关节可以实现四个维度的转动,四维度转动复合联动可以实现任意方向、任意角度的转动,大大提高了整个机械手臂的灵活性,提供了高度适配的机械手臂。技术研发人员:邵惠华,李卫东受保护的技术使用者:上海汇丰医疗器械股份有限公司技术研发日:20231226技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/304558.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表