基于解集合并算法的港口泊位和岸桥联合调度优化方法
- 国知局
- 2024-10-09 15:45:19
本发明属于港口物流管理和智能调度领域,具体涉及一种基于解集合并算法的港口泊位和岸桥联合调度优化方法。
背景技术:
1、随着全球经济一体化和国际贸易的蓬勃发展,港口作为国际货物集散和运输的重要枢纽,承担着越来越重要的角色。现代化的大型集装箱码头需要充分利用有限的泊位和岸桥等装卸设备资源,提高整体的装卸效率和运营效益。
2、传统的港口调度方法通常仅关注泊位或岸桥的单一层面优化,很难充分发挥系统的整体协同效应。而港口泊位和岸桥资源是紧密相关的,需要进行联合调度才能实现最佳的资源利用。例如,合理安排泊位位置和分配岸桥数量可以减少船舶的等待时间,而调整岸桥的工作范围又会影响到泊位的使用效率。因此,仅从单一维度进行优化很难达到全局最优。
3、此外,随着港口规模的不断扩大和业务量的快速增长,港口装卸设备的动态协调调度问题愈加复杂。船舶的到达时间和装卸需求具有高度的动态性和不确定性,这给港口调度带来了更大的挑战。如何快速、准确地响应动态变化,合理调配有限的装卸资源,成为提升现代集装箱码头运营水平的关键所在。
4、因此,如何有效协调和优化港口装卸设备的动态调度,对于提升港口整体装卸效率和运营绩效具有重要意义。
5、目前对于港口物流管理和智能调度问题的研究较为欠缺,且对于港口装卸设备动态协调调度的优化方法的发明专利仍存在空白。
6、蒋美仙等人的发明专利《一种不确定环境下的多码头潮汐港泊位岸桥联合调度方法》(蒋美仙,周健,冯佳佳,周琳,马方钲.一种不确定环境下的多码头潮汐港泊位岸桥联合调度方法[p].中国专利:cn114626754a,2022.06.14),提出了一种不确定环境下的多码头潮汐港泊位和岸桥联合调度优化方法。首先建立了不确定条件下的多码头泊位和岸桥联合调度数学模型,结合随机生成和贪婪构造两种策略生成初始种群,并采用基因修复算法将不可行解转换为可行解。接下来利用精英保留和轮盘赌选择策略生成子代种群,结合适应度值驱动的交叉变异算子进行解空间初步搜索,最后采用基于模拟退火的局部搜索算法进一步优化。该方法通过比较不同算法变体的性能,验证了其在不确定条件下的有效性。但该发明模型参数设置的难度较大,且这些参数的设置对调度结果有显著影响,在实际操作中,准确获取这些参数并不容易,需要通过大量的历史数据和经验。
7、刘庆金等人的发明专利《一种基于蚁群算法的多目标岸桥-泊位调度优化方法》(刘庆金,李鹏,陈军伟.一种基于蚁群算法的多目标岸桥-泊位调度优化方法[p].中国专利:cn107330561b,2017.11.07),该发明公开了一种基于蚁群算法的多目标岸桥-泊位调度优化方法,属于港口调度领域。针对多目标岸桥-泊位调度模型,该发明提出了两种基于蚁群算法的求解算法,可以对到港集装箱船舶进行调度优化,提高算法执行效率,在较短时间内获得pareto最优解,从而提高港口运行效率,减少运营成本,对促进区域和国家经济发展具有重要意义。最后通过仿真实验验证了所提出算法的优越性,在收敛性和执行时间两方面均优于其他算法。但该发明仅仿真验证的实例规模较小,难以全面验证算法在实际大规模复杂问题中的适用性。
8、任鸿翔等人的发明专利《一种基于多目标优化的岸桥-avg联合调度方法》(任鸿翔,段雅婷,孟耀,徐富权,潘明阳,梁霄,陶瑞,孙佳文,董雅欣.一种基于多目标优化的岸桥-avg联合调度方法[p].中国专利:cn116882665a,2023.10.13),公开了一种基于多目标优化的岸桥-agv联合调度方法。首先获取港口数据并设计联合调度假设条件,然后基于此构建多目标优化模型,包括调度目标函数和约束条件。接下来设计并改进多目标优化算法,根据优化算法对调度目标函数进行计算,获取结果后对岸桥和agv进行调度。该发明采用改进的nsga-ii算法,能有效解决岸桥和agv的联合调度问题,提高港口作业效率。但该方法在进行大规模、复杂约束的问题时,容易陷入局部最优解。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于解集合并算法的港口泊位和岸桥联合调度优化方法和装置。本发明要解决的技术问题通过以下技术方案实现:
2、第一方面,本发明实施例提供了一种基于解集合并算法的港口泊位和岸桥联合调度优化方法,所述方法包括:
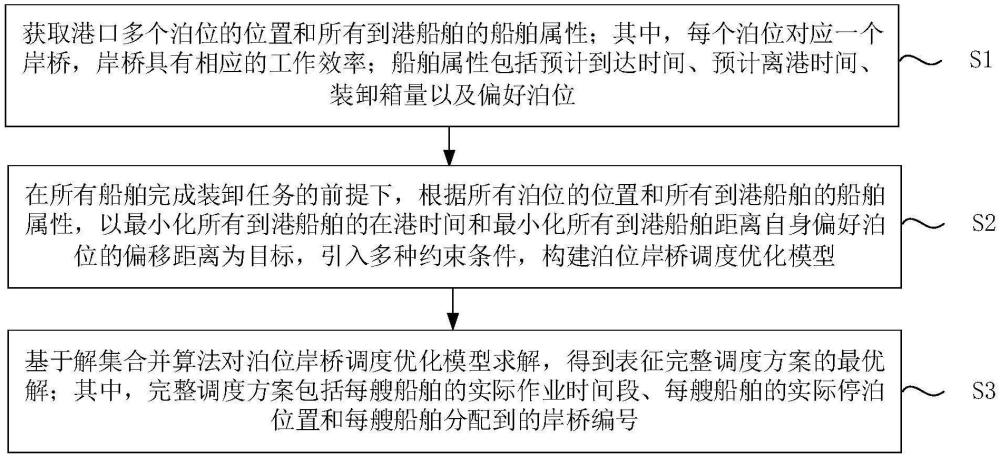
3、获取港口多个泊位和岸桥的信息以及所有到港船舶的船舶属性;其中,每个泊位对应一个岸桥,岸桥具有相应的工作效率;所述船舶属性包括预计到达时间、预计离港时间、装卸箱量以及偏好泊位;
4、在所有船舶完成装卸任务的前提下,根据所有泊位和岸桥的信息以及到港船船舶的船舶属性,以最小化所有到港船舶的在港时间和最小化所有到港船舶距离自身偏好泊位的偏移距离为目标,引入多种约束条件,构建泊位岸桥调度优化模型;
5、基于解集合并算法对所述泊位岸桥调度优化模型求解,得到表征完整调度方案的最优解;其中,所述完整调度方案包括每艘船舶的实际作业时间段、每艘船舶的实际停泊位置和每艘船舶分配到的岸桥编号。
6、在本发明的一个实施例中,引入的多种约束条件,包括基本约束条件,所述基本约束条件包括:
7、时间约束,是指任意两艘船舶的工作时间不能重叠;且船舶必须到港后才能开始作业;
8、空间约束,是指任意两艘船舶的停泊位置不能重叠,且相邻船舶之间保留预设的间隔;
9、岸桥约束,是指单个岸桥在同一时间仅服务于一艘船舶。
10、在本发明的一个实施例中,引入的多种约束条件,包括附加约束条件,所述附加约束条件包括:
11、岸桥工作范围约束,是指岸桥的服务范围覆盖船舶的泊位位置;
12、岸桥连续性约束,是指为同一艘船舶服务的多个岸桥连续;
13、总岸桥数量约束,是指在任意时间点,处于工作状态的岸桥数量不超过总岸桥数量;
14、船舶安全距离约束,是指两艘船舶之间具有最小安全距离;
15、岸桥船舶安全距离约束,是指两艘船舶之间具有最小安全距离;
16、岸桥服务限制,是指岸桥在同一时间不能跨越多个船舶的服务范围;
17、变量约束:是对变量0、1的约束。
18、在本发明的一个实施例中,所述泊位岸桥调度优化模型,表示为:
19、
20、s.t.
21、
22、其中,j为船舶的编号,v为调度期内预计到达港口的船舶总数;aej为船舶j的实际结束工作时刻;eaj为船舶j的预计到达时刻;locj为船舶j的停泊位置,以船头位置表示;tarj为船舶j偏好泊位的位置,以船头位置表示;s.t.表示约束条件,以1~10分别示意不同的约束;asj为船舶j的实际开始工作时刻;j∈v={1,2,3,…,v},v为调度期内预计到达港口的船舶集合;l为岸线的总长度;lj为船舶j的长度;wjk表示岸桥k是否为船舶j服务,wjk=1表示服务,wjk=0表示不服务;effk表示岸桥k的工作效率;nj为船舶j的装卸总量;c为港口的岸桥总数;tij表示船舶i和船舶j的工作时间是否有重合,tij=1表示有重合,tij=0表示没有重合;pij表示船舶i和船舶j的停泊位置是否有重合,pij=1表示有重合,pij=0表示没有重合;sk为岸桥k的最小工作位置;ek为岸桥k的最大工作位置;k∈c={1,2,3,…,c},c为港口的岸桥集合;t∈t={asj,aej|j∈v},t表示所有船舶的开始工作、结束工作的时间点的集合。
23、在本发明的一个实施例中,所述基于解集合并算法对所述泊位岸桥调度优化模型求解,得到表征完整调度方案的最优解,包括:
24、步骤a1,初始化泊位岸桥调度实例,并设置调度方案数量ns、总计算时间t_total、每次迭代的mip求解器时间限制t_iter以及变量集合的随机子集数量k;
25、步骤a2,利用启发式算法生成所述泊位岸桥调度优化模型的初始解集;
26、步骤a3,将当前的初始解集依据预设规则分割为多个子集;
27、步骤a4,根据得到的子集信息构建mip模型;其中,所述mip模型中包含目标函数和约束条件;
28、步骤a5,使用mip求解器求解mip模型,得到合并解,并将其加入解集中,择优后得到更新后的解集;
29、步骤a6,判断是否达到总计算时间t_total;若是,执行步骤a7;若否,将更新后的解集代替初始解集,返回步骤a3;
30、步骤a7,在更新后的解集中确定表征完整调度方案的最优解。
31、在本发明的一个实施例中,步骤a2,利用启发式算法生成所述泊位岸桥调度优化模型的初始解集,包括:
32、利用并行化遗传算法生成所述泊位岸桥调度优化模型的初始解集。
33、在本发明的一个实施例中,所述利用并行化遗传算法生成所述泊位岸桥调度优化模型的初始解集,包括:
34、初始化并行计算环境,设置可用的处理器数量;
35、针对每个调度方案,对所述泊位岸桥调度优化模型进行染色体编码,其中,染色体由2×v的矩阵构成,染色的第j列表示船舶j的信息;v为调度期内预计到达港口的船舶总数;矩阵第一行表示船舶在预计到达时间后在泊位停泊直至开始工作的等待停泊时刻,第二行表示船舶停泊泊位的位置;
36、完成种群初始化;其中,初始化种群个体时,根据船舶的停泊位置确定为其分配的固定岸桥数,根据固定岸桥数得出该船舶的工作时间和离开时间,以确保初始化过程中每生成一条船舶的信息个体解均为可行解;
37、对当前种群中的个体进行适应度计算;其中,适应度计算以等待时间和偏移距离作为最小化优化目标,两个指标的值越低,则个体适应度越大;
38、基于计算出的个体适应度,使用精英选择和轮盘赌的方法选出父代个体;
39、对选出的任意两个父代个体进行交叉操作;其中,两个父代个体进行交叉操作时,随机选择时长不固定的时间段,将预计在该段时间内到达的所有船舶信息进行交换;
40、进行变异操作得到新的子代,其中,变异操作随机选择到达时间相近的两条船舶信息进行互换;
41、将得到的所有子代合并进之前的种群,基于个体适应度计算,得到更新的种群;
42、返回父代个体选择步骤,在经过预设次迭代后,选择种群中的最优解;
43、将得到的ns个最优解加入解集,得到所述泊位岸桥调度优化模型的初始解集。
44、在本发明的一个实施例中,所述mip模型中的目标函数表示为:
45、
46、其中,α和β为权重系数,根据子集信息自动调整;所述mip模型中的约束条件包括基础约束条件和附加约束条件。
47、在本发明的一个实施例中,步骤a7,在更新后的解集中确定表征完整调度方案的最优解,包括:
48、将更新后的解集中的每一个解代入所述泊位岸桥调度优化模型表示的目标函数,确定使其最小的解为表征完整调度方案的最优解。
49、第二方面,本发明实施例提供了一种基于解集合并算法的港口泊位和岸桥联合调度优化装置,所述装置包括:
50、数据获取模块,用于获取港口多个泊位和岸桥的信息以及所有到港船舶的船舶属性;其中,每个泊位对应一个岸桥,岸桥具有相应的工作效率;所述船舶属性包括预计到达时间、预计离港时间、装卸箱量以及偏好泊位;
51、优化模型构建模块,用于在所有船舶完成装卸任务的前提下,根据所有泊位和岸桥的信息以及到港船船舶的船舶属性,以最小化所有到港船舶的在港时间和最小化所有到港船舶距离自身偏好泊位的偏移距离为目标,引入多种约束条件,构建泊位岸桥调度优化模型;
52、求解模块,用于基于解集合并算法对所述泊位岸桥调度优化模型求解,得到表征完整调度方案的最优解;其中,所述完整调度方案包括每艘船舶的实际作业时间段、每艘船舶的实际停泊位置和每艘船舶分配到的岸桥编号。
53、本发明的有益效果:
54、针对码头岸线资源有限、岸桥数量有限、船舶到港时间不确定等问题,本发明提出了一种基于解集合并算法的港口泊位和岸桥联合调度优化方法,首先获取港口多个泊位和岸桥的信息以及所有到港船舶的船舶属性;然后在所有船舶完成装卸任务的前提下,根据所有泊位和岸桥的信息以及到港船船舶的船舶属性,以最小化所有到港船舶的在港时间和最小化所有到港船舶距离自身偏好泊位的偏移距离为目标,引入多种约束条件,构建泊位岸桥调度优化模型;最后基于解集合并算法对所述泊位岸桥调度优化模型求解,得到表征完整调度方案的最优解;其中,所述完整调度方案包括每艘船舶的实际作业时间段、每艘船舶的实际停泊位置和每艘船舶分配到的岸桥编号。本发明实施例提供的该模型能够合理调度船舶泊位和岸桥资源,最大限度利用码头资源,提高整体运营效率;以最小化总在港时间和总偏移距离为目标,可大幅缩短船舶在港时间、减少偏移距离,提升码头竞争力;同时为码头自动化和智能化管理提供了技术支撑,促进码头向智能化发展。
本文地址:https://www.jishuxx.com/zhuanli/20240929/309937.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。